






 博客围绕STM32单片机串口程序展开,介绍了主机和从机的MCU型号及串口使用情况。重点分析了HAL_UART_Receive_IT函数只能触发一次接收中断的原因,是因hal库HAL_UART_IRQHandler函数会失能接收中断。最后给出解决办法,即在串口中断公共处理函数后重新使能接收中断。
博客围绕STM32单片机串口程序展开,介绍了主机和从机的MCU型号及串口使用情况。重点分析了HAL_UART_Receive_IT函数只能触发一次接收中断的原因,是因hal库HAL_UART_IRQHandler函数会失能接收中断。最后给出解决办法,即在串口中断公共处理函数后重新使能接收中断。
程序框架
1、主机MCU:STM32F103RCT6;从机MCU:STM32F103ZET6
2、两个MCU分贝打开串口1和串口2。串口1打印调试信息,串口2用来跨平台通信。
主机部分
main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
uint8_t USART2_Transmit_Buf[] = "1234567890rasdfdsgvsdgvsdgbsdgf\r\n";
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if( HAL_OK == HAL_UART_Transmit(&huart2,USART2_Transmit_Buf,sizeof(USART2_Transmit_Buf),1000) )
{
uint8_t USART1_Transmit_Buf[] = "´®¿Ú2·¢ËÍÍê³É\r\n";
HAL_UART_Transmit(&huart1,USART1_Transmit_Buf,sizeof(USART1_Transmit_Buf),1000);
}
else
{
uint8_t USART1_Transmit_Buf[] = "´®¿Ú2·¢ËÍʧ°Ü\r\n";
HAL_UART_Transmit(&huart1,USART1_Transmit_Buf,sizeof(USART1_Transmit_Buf),1000);
}
HAL_Delay(1000); //ÑÓ³ÙÒ»Ãë
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
uart.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file usart.c
* @brief This file provides code for the configuration
* of the USART instances.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "usart.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
UART_HandleTypeDef huart1;
UART_HandleTypeDef huart2;
/* USART1 init function */
void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
/* USART2 init function */
void MX_USART2_UART_Init(void)
{
/* USER CODE BEGIN USART2_Init 0 */
/* USER CODE END USART2_Init 0 */
/* USER CODE BEGIN USART2_Init 1 */
/* USER CODE END USART2_Init 1 */
huart2.Instance = USART2;
huart2.Init.BaudRate = 115200;
huart2.Init.WordLength = UART_WORDLENGTH_8B;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.Mode = UART_MODE_TX_RX;
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart2.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART2_Init 2 */
/* USER CODE END USART2_Init 2 */
}
void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspInit 0 */
/* USER CODE END USART1_MspInit 0 */
/* USART1 clock enable */
__HAL_RCC_USART1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USART1 interrupt Init */
HAL_NVIC_SetPriority(USART1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspInit 1 */
/* USER CODE END USART1_MspInit 1 */
}
else if(uartHandle->Instance==USART2)
{
/* USER CODE BEGIN USART2_MspInit 0 */
/* USER CODE END USART2_MspInit 0 */
/* USART2 clock enable */
__HAL_RCC_USART2_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**USART2 GPIO Configuration
PA2 ------> USART2_TX
PA3 ------> USART2_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_2;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USART2 interrupt Init */
HAL_NVIC_SetPriority(USART2_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USART2_IRQn);
/* USER CODE BEGIN USART2_MspInit 1 */
/* USER CODE END USART2_MspInit 1 */
}
}
void HAL_UART_MspDeInit(UART_HandleTypeDef* uartHandle)
{
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspDeInit 0 */
/* USER CODE END USART1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART1_CLK_DISABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_9|GPIO_PIN_10);
/* USART1 interrupt Deinit */
HAL_NVIC_DisableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspDeInit 1 */
/* USER CODE END USART1_MspDeInit 1 */
}
else if(uartHandle->Instance==USART2)
{
/* USER CODE BEGIN USART2_MspDeInit 0 */
/* USER CODE END USART2_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART2_CLK_DISABLE();
/**USART2 GPIO Configuration
PA2 ------> USART2_TX
PA3 ------> USART2_RX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_2|GPIO_PIN_3);
/* USART2 interrupt Deinit */
HAL_NVIC_DisableIRQ(USART2_IRQn);
/* USER CODE BEGIN USART2_MspDeInit 1 */
/* USER CODE END USART2_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
stm32f1xx_it.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file stm32f1xx_it.c
* @brief Interrupt Service Routines.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32f1xx_it.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN TD */
/* USER CODE END TD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/* External variables --------------------------------------------------------*/
extern UART_HandleTypeDef huart1;
extern UART_HandleTypeDef huart2;
/* USER CODE BEGIN EV */
/* USER CODE END EV */
/******************************************************************************/
/* Cortex-M3 Processor Interruption and Exception Handlers */
/******************************************************************************/
/**
* @brief This function handles Non maskable interrupt.
*/
void NMI_Handler(void)
{
/* USER CODE BEGIN NonMaskableInt_IRQn 0 */
/* USER CODE END NonMaskableInt_IRQn 0 */
/* USER CODE BEGIN NonMaskableInt_IRQn 1 */
while (1)
{
}
/* USER CODE END NonMaskableInt_IRQn 1 */
}
/**
* @brief This function handles Hard fault interrupt.
*/
void HardFault_Handler(void)
{
/* USER CODE BEGIN HardFault_IRQn 0 */
/* USER CODE END HardFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_HardFault_IRQn 0 */
/* USER CODE END W1_HardFault_IRQn 0 */
}
}
/**
* @brief This function handles Memory management fault.
*/
void MemManage_Handler(void)
{
/* USER CODE BEGIN MemoryManagement_IRQn 0 */
/* USER CODE END MemoryManagement_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_MemoryManagement_IRQn 0 */
/* USER CODE END W1_MemoryManagement_IRQn 0 */
}
}
/**
* @brief This function handles Prefetch fault, memory access fault.
*/
void BusFault_Handler(void)
{
/* USER CODE BEGIN BusFault_IRQn 0 */
/* USER CODE END BusFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_BusFault_IRQn 0 */
/* USER CODE END W1_BusFault_IRQn 0 */
}
}
/**
* @brief This function handles Undefined instruction or illegal state.
*/
void UsageFault_Handler(void)
{
/* USER CODE BEGIN UsageFault_IRQn 0 */
/* USER CODE END UsageFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_UsageFault_IRQn 0 */
/* USER CODE END W1_UsageFault_IRQn 0 */
}
}
/**
* @brief This function handles System service call via SWI instruction.
*/
void SVC_Handler(void)
{
/* USER CODE BEGIN SVCall_IRQn 0 */
/* USER CODE END SVCall_IRQn 0 */
/* USER CODE BEGIN SVCall_IRQn 1 */
/* USER CODE END SVCall_IRQn 1 */
}
/**
* @brief This function handles Debug monitor.
*/
void DebugMon_Handler(void)
{
/* USER CODE BEGIN DebugMonitor_IRQn 0 */
/* USER CODE END DebugMonitor_IRQn 0 */
/* USER CODE BEGIN DebugMonitor_IRQn 1 */
/* USER CODE END DebugMonitor_IRQn 1 */
}
/**
* @brief This function handles Pendable request for system service.
*/
void PendSV_Handler(void)
{
/* USER CODE BEGIN PendSV_IRQn 0 */
/* USER CODE END PendSV_IRQn 0 */
/* USER CODE BEGIN PendSV_IRQn 1 */
/* USER CODE END PendSV_IRQn 1 */
}
/**
* @brief This function handles System tick timer.
*/
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
/* USER CODE END SysTick_IRQn 0 */
HAL_IncTick();
/* USER CODE BEGIN SysTick_IRQn 1 */
/* USER CODE END SysTick_IRQn 1 */
}
/******************************************************************************/
/* STM32F1xx Peripheral Interrupt Handlers */
/* Add here the Interrupt Handlers for the used peripherals. */
/* For the available peripheral interrupt handler names, */
/* please refer to the startup file (startup_stm32f1xx.s). */
/******************************************************************************/
/**
* @brief This function handles USART1 global interrupt.
*/
void USART1_IRQHandler(void)
{
/* USER CODE BEGIN USART1_IRQn 0 */
/* USER CODE END USART1_IRQn 0 */
HAL_UART_IRQHandler(&huart1);
/* USER CODE BEGIN USART1_IRQn 1 */
/* USER CODE END USART1_IRQn 1 */
}
/**
* @brief This function handles USART2 global interrupt.
*/
void USART2_IRQHandler(void)
{
/* USER CODE BEGIN USART2_IRQn 0 */
/* USER CODE END USART2_IRQn 0 */
HAL_UART_IRQHandler(&huart2);
/* USER CODE BEGIN USART2_IRQn 1 */
/* USER CODE END USART2_IRQn 1 */
}
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
从机部分
main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stm32f1xx_it.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
uint8_t len;
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if (g_usart1_rx_sta & 0x8000) /* ½ÓÊÕ´®¿Ú1µÄÊý¾Ý */
{
len = g_usart1_rx_sta & 0x3fff; /* µÃµ½´Ë´Î½ÓÊÕµ½µÄÊý¾Ý³¤¶È */
uint8_t printf_buf[] = "´®¿Ú1£º ";
HAL_UART_Transmit(&huart1, printf_buf, sizeof(printf_buf), 1000);
HAL_UART_Transmit(&huart1, USART1_Reveive_Data, len, 1000); /* ·¢ËͽÓÊÕµ½µÄÊý¾Ý */
while(__HAL_UART_GET_FLAG(&huart1, UART_FLAG_TC) != SET); /* µÈ´ý·¢ËͽáÊø */
g_usart1_rx_sta = 0;
len = 0;
}
if (g_usart2_rx_sta & 0x8000) /* ½ÓÊÕ´®¿Ú1µÄÊý¾Ý */
{
len = g_usart2_rx_sta & 0x3fff; /* µÃµ½´Ë´Î½ÓÊÕµ½µÄÊý¾Ý³¤¶È */
uint8_t printf_buf[] = "´®¿Ú2£º ";
HAL_UART_Transmit(&huart1, printf_buf, sizeof(printf_buf), 1000);
HAL_UART_Transmit(&huart1, USART2_Reveive_Data, len, 1000); /* ·¢ËͽÓÊÕµ½µÄÊý¾Ý */
while(__HAL_UART_GET_FLAG(&huart1, UART_FLAG_TC) != SET); /* µÈ´ý·¢ËͽáÊø */
g_usart2_rx_sta = 0;
len = 0;
}
HAL_Delay(500); //Õâ¸öÑÓʱÖ÷ÒªÊÇΪÁË·½±ã²é¿´´òÓ¡Êý¾Ý
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
usart.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file usart.c
* @brief This file provides code for the configuration
* of the USART instances.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "usart.h"
/* USER CODE BEGIN 0 */
uint8_t USART2_Reveive_Buf[USART_RECEIVE_BUFFER_SIZE] = {0};
uint8_t USART1_Reveive_Buf[USART_RECEIVE_BUFFER_SIZE] = {0};
uint8_t USART2_Reveive_Data[USART_RECEIVE_DATA_SIZE] = {0};
uint8_t USART1_Reveive_Data[USART_RECEIVE_DATA_SIZE] = {0};
/* USER CODE END 0 */
UART_HandleTypeDef huart1;
UART_HandleTypeDef huart2;
/* USART1 init function */
void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
HAL_UART_Receive_IT(&huart1,USART1_Reveive_Buf, 1);
/* USER CODE END USART1_Init 2 */
}
/* USART2 init function */
void MX_USART2_UART_Init(void)
{
/* USER CODE BEGIN USART2_Init 0 */
/* USER CODE END USART2_Init 0 */
/* USER CODE BEGIN USART2_Init 1 */
/* USER CODE END USART2_Init 1 */
huart2.Instance = USART2;
huart2.Init.BaudRate = 115200;
huart2.Init.WordLength = UART_WORDLENGTH_8B;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.Mode = UART_MODE_TX_RX;
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart2.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART2_Init 2 */
HAL_UART_Receive_IT(&huart2,USART2_Reveive_Buf, 1);
/* USER CODE END USART2_Init 2 */
}
void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspInit 0 */
/* USER CODE END USART1_MspInit 0 */
/* USART1 clock enable */
__HAL_RCC_USART1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USART1 interrupt Init */
HAL_NVIC_SetPriority(USART1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspInit 1 */
/* USER CODE END USART1_MspInit 1 */
}
else if(uartHandle->Instance==USART2)
{
/* USER CODE BEGIN USART2_MspInit 0 */
/* USER CODE END USART2_MspInit 0 */
/* USART2 clock enable */
__HAL_RCC_USART2_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**USART2 GPIO Configuration
PA2 ------> USART2_TX
PA3 ------> USART2_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_2;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USART2 interrupt Init */
HAL_NVIC_SetPriority(USART2_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USART2_IRQn);
/* USER CODE BEGIN USART2_MspInit 1 */
/* USER CODE END USART2_MspInit 1 */
}
}
void HAL_UART_MspDeInit(UART_HandleTypeDef* uartHandle)
{
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspDeInit 0 */
/* USER CODE END USART1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART1_CLK_DISABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_9|GPIO_PIN_10);
/* USART1 interrupt Deinit */
HAL_NVIC_DisableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspDeInit 1 */
/* USER CODE END USART1_MspDeInit 1 */
}
else if(uartHandle->Instance==USART2)
{
/* USER CODE BEGIN USART2_MspDeInit 0 */
/* USER CODE END USART2_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART2_CLK_DISABLE();
/**USART2 GPIO Configuration
PA2 ------> USART2_TX
PA3 ------> USART2_RX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_2|GPIO_PIN_3);
/* USART2 interrupt Deinit */
HAL_NVIC_DisableIRQ(USART2_IRQn);
/* USER CODE BEGIN USART2_MspDeInit 1 */
/* USER CODE END USART2_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
usart.h
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file usart.h
* @brief This file contains all the function prototypes for
* the usart.c file
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __USART_H__
#define __USART_H__
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
extern UART_HandleTypeDef huart1;
extern UART_HandleTypeDef huart2;
/* USER CODE BEGIN Private defines */
#define USART_RECEIVE_BUFFER_SIZE 1
#define USART_RECEIVE_DATA_SIZE 200
/* USER CODE END Private defines */
void MX_USART1_UART_Init(void);
void MX_USART2_UART_Init(void);
/* USER CODE BEGIN Prototypes */
extern uint8_t USART2_Reveive_Buf[USART_RECEIVE_BUFFER_SIZE];
extern uint8_t USART1_Reveive_Buf[USART_RECEIVE_BUFFER_SIZE];
extern uint8_t USART2_Reveive_Data[USART_RECEIVE_DATA_SIZE] ;
extern uint8_t USART1_Reveive_Data[USART_RECEIVE_DATA_SIZE] ;
/* USER CODE END Prototypes */
#ifdef __cplusplus
}
#endif
#endif /* __USART_H__ */
stm32f1xx_it.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file stm32f1xx_it.c
* @brief Interrupt Service Routines.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32f1xx_it.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "usart.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN TD */
/* USER CODE END TD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
uint8_t USART2_RecIt_State = 0;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/* External variables --------------------------------------------------------*/
extern UART_HandleTypeDef huart1;
extern UART_HandleTypeDef huart2;
/* USER CODE BEGIN EV */
unsigned short g_usart2_rx_sta = 0;
unsigned short g_usart1_rx_sta = 0;
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
uint8_t USART1_Transmit_Buf[] = "½øÈë»Øµ÷º¯Êý\r\n";
// HAL_UART_Transmit(&huart1,USART1_Transmit_Buf,sizeof(USART1_Transmit_Buf),1000);
if (huart->Instance == USART1) /* Èç¹ûÊÇ´®¿Ú1 */
{
if ((g_usart1_rx_sta & 0x8000) == 0) /* ½ÓÊÕδÍê³É */
{
if (g_usart1_rx_sta & 0x4000) /* ½ÓÊÕµ½ÁË0x0d£¨¼´»Ø³µ¼ü£© */
{
if (USART1_Reveive_Buf[0] != 0x0a) /* ½ÓÊÕµ½µÄ²»ÊÇ0x0a£¨¼´²»ÊÇ»»Ðмü£© */
{
g_usart1_rx_sta = 0; /* ½ÓÊÕ´íÎó,ÖØпªÊ¼ */
}
else /* ½ÓÊÕµ½µÄÊÇ0x0a£¨¼´»»Ðмü£© */
{
g_usart1_rx_sta |= 0x8000; /* ½ÓÊÕÍê³ÉÁË */
}
}
else /* »¹Ã»ÊÕµ½0X0d£¨¼´»Ø³µ¼ü£© */
{
if (USART1_Reveive_Buf[0] == 0x0d)
g_usart1_rx_sta |= 0x4000;
else
{
USART1_Reveive_Data[g_usart1_rx_sta & 0X3FFF] = USART1_Reveive_Buf[0];
g_usart1_rx_sta++;
if (g_usart1_rx_sta > (USART_RECEIVE_DATA_SIZE - 1))
{
g_usart1_rx_sta = 0; /* ½ÓÊÕÊý¾Ý´íÎó,ÖØпªÊ¼½ÓÊÕ */
}
}
}
}
}
if (huart->Instance == USART2) /* Èç¹ûÊÇ´®¿Ú2 */
{
uint8_t USART1_Transmit_Buf[] = "½øÈë»Øµ÷º¯Êý´®¿Ú2\r\n";
// HAL_UART_Transmit(&huart1,USART1_Transmit_Buf,sizeof(USART1_Transmit_Buf),1000);
if ((g_usart2_rx_sta & 0x8000) == 0) /* ½ÓÊÕδÍê³É */
{
if (g_usart2_rx_sta & 0x4000) /* ½ÓÊÕµ½ÁË0x0d£¨¼´»Ø³µ¼ü£© */
{
if (USART2_Reveive_Buf[0] != 0x0a) /* ½ÓÊÕµ½µÄ²»ÊÇ0x0a£¨¼´²»ÊÇ»»Ðмü£© */
{
g_usart2_rx_sta = 0; /* ½ÓÊÕ´íÎó,ÖØпªÊ¼ */
}
else /* ½ÓÊÕµ½µÄÊÇ0x0a£¨¼´»»Ðмü£© */
{
g_usart2_rx_sta |= 0x8000; /* ½ÓÊÕÍê³ÉÁË */
}
}
else /* »¹Ã»ÊÕµ½0X0d£¨¼´»Ø³µ¼ü£© */
{
if (USART2_Reveive_Buf[0] == 0x0d)
g_usart2_rx_sta |= 0x4000;
else
{
USART2_Reveive_Data[g_usart2_rx_sta & 0X3FFF] = USART2_Reveive_Buf[0];
g_usart2_rx_sta++;
if (g_usart2_rx_sta > (USART_RECEIVE_DATA_SIZE - 1))
{
g_usart2_rx_sta = 0; /* ½ÓÊÕÊý¾Ý´íÎó,ÖØпªÊ¼½ÓÊÕ */
}
}
}
}
}
}
/* USER CODE END EV */
/******************************************************************************/
/* Cortex-M3 Processor Interruption and Exception Handlers */
/******************************************************************************/
/**
* @brief This function handles Non maskable interrupt.
*/
void NMI_Handler(void)
{
/* USER CODE BEGIN NonMaskableInt_IRQn 0 */
/* USER CODE END NonMaskableInt_IRQn 0 */
/* USER CODE BEGIN NonMaskableInt_IRQn 1 */
while (1)
{
}
/* USER CODE END NonMaskableInt_IRQn 1 */
}
/**
* @brief This function handles Hard fault interrupt.
*/
void HardFault_Handler(void)
{
/* USER CODE BEGIN HardFault_IRQn 0 */
/* USER CODE END HardFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_HardFault_IRQn 0 */
/* USER CODE END W1_HardFault_IRQn 0 */
}
}
/**
* @brief This function handles Memory management fault.
*/
void MemManage_Handler(void)
{
/* USER CODE BEGIN MemoryManagement_IRQn 0 */
/* USER CODE END MemoryManagement_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_MemoryManagement_IRQn 0 */
/* USER CODE END W1_MemoryManagement_IRQn 0 */
}
}
/**
* @brief This function handles Prefetch fault, memory access fault.
*/
void BusFault_Handler(void)
{
/* USER CODE BEGIN BusFault_IRQn 0 */
/* USER CODE END BusFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_BusFault_IRQn 0 */
/* USER CODE END W1_BusFault_IRQn 0 */
}
}
/**
* @brief This function handles Undefined instruction or illegal state.
*/
void UsageFault_Handler(void)
{
/* USER CODE BEGIN UsageFault_IRQn 0 */
/* USER CODE END UsageFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_UsageFault_IRQn 0 */
/* USER CODE END W1_UsageFault_IRQn 0 */
}
}
/**
* @brief This function handles System service call via SWI instruction.
*/
void SVC_Handler(void)
{
/* USER CODE BEGIN SVCall_IRQn 0 */
/* USER CODE END SVCall_IRQn 0 */
/* USER CODE BEGIN SVCall_IRQn 1 */
/* USER CODE END SVCall_IRQn 1 */
}
/**
* @brief This function handles Debug monitor.
*/
void DebugMon_Handler(void)
{
/* USER CODE BEGIN DebugMonitor_IRQn 0 */
/* USER CODE END DebugMonitor_IRQn 0 */
/* USER CODE BEGIN DebugMonitor_IRQn 1 */
/* USER CODE END DebugMonitor_IRQn 1 */
}
/**
* @brief This function handles Pendable request for system service.
*/
void PendSV_Handler(void)
{
/* USER CODE BEGIN PendSV_IRQn 0 */
/* USER CODE END PendSV_IRQn 0 */
/* USER CODE BEGIN PendSV_IRQn 1 */
/* USER CODE END PendSV_IRQn 1 */
}
/**
* @brief This function handles System tick timer.
*/
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
/* USER CODE END SysTick_IRQn 0 */
HAL_IncTick();
/* USER CODE BEGIN SysTick_IRQn 1 */
/* USER CODE END SysTick_IRQn 1 */
}
/******************************************************************************/
/* STM32F1xx Peripheral Interrupt Handlers */
/* Add here the Interrupt Handlers for the used peripherals. */
/* For the available peripheral interrupt handler names, */
/* please refer to the startup file (startup_stm32f1xx.s). */
/******************************************************************************/
/**
* @brief This function handles USART1 global interrupt.
*/
void USART1_IRQHandler(void)
{
/* USER CODE BEGIN USART1_IRQn 0 */
USART2_RecIt_State = 1;
uint8_t USART1_Transmit_Buf[] = "½øÈë´®¿Ú1ÖжÏ\r\n";
// HAL_UART_Transmit(&huart1,USART1_Transmit_Buf,sizeof(USART1_Transmit_Buf),1000);
/* USER CODE END USART1_IRQn 0 */
HAL_UART_IRQHandler(&huart1);
/* USER CODE BEGIN USART1_IRQn 1 */
while (HAL_UART_Receive_IT(&huart1,USART1_Reveive_Buf, 1) != HAL_OK) /* ÖØпªÆôÖжϲ¢½ÓÊÕÊý¾Ý */
{
/* Èç¹û³ö´í»á¿¨ËÀÔÚÕâÀï */
}
/* USER CODE END USART1_IRQn 1 */
}
/**
* @brief This function handles USART2 global interrupt.
*/
void USART2_IRQHandler(void)
{
/* USER CODE BEGIN USART2_IRQn 0 */
//uint8_t USART1_Transmit_Buf[] = "½øÈë´®¿Ú2ÖжÏ\r\n";
// HAL_UART_Transmit(&huart1,USART1_Transmit_Buf,sizeof(USART1_Transmit_Buf),1000);
/* USER CODE END USART2_IRQn 0 */
HAL_UART_IRQHandler(&huart2);
/* USER CODE BEGIN USART2_IRQn 1 */
while (HAL_UART_Receive_IT(&huart2,USART2_Reveive_Buf, 1) != HAL_OK) /* ÖØпªÆôÖжϲ¢½ÓÊÕÊý¾Ý */
{
/* Èç¹û³ö´í»á¿¨ËÀÔÚÕâÀï */
}
/* USER CODE END USART2_IRQn 1 */
}
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
stm32f1xx_it.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file stm32f1xx_it.h
* @brief This file contains the headers of the interrupt handlers.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __STM32F1xx_IT_H
#define __STM32F1xx_IT_H
#ifdef __cplusplus
extern "C" {
#endif
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Exported types ------------------------------------------------------------*/
/* USER CODE BEGIN ET */
/* USER CODE END ET */
/* Exported constants --------------------------------------------------------*/
/* USER CODE BEGIN EC */
/* USER CODE END EC */
/* Exported macro ------------------------------------------------------------*/
/* USER CODE BEGIN EM */
extern unsigned short g_usart2_rx_sta;
extern unsigned short g_usart1_rx_sta;
/* USER CODE END EM */
/* Exported functions prototypes ---------------------------------------------*/
void NMI_Handler(void);
void HardFault_Handler(void);
void MemManage_Handler(void);
void BusFault_Handler(void);
void UsageFault_Handler(void);
void SVC_Handler(void);
void DebugMon_Handler(void);
void PendSV_Handler(void);
void SysTick_Handler(void);
void USART1_IRQHandler(void);
void USART2_IRQHandler(void);
/* USER CODE BEGIN EFP */
/* USER CODE END EFP */
#ifdef __cplusplus
}
#endif
#endif /* __STM32F1xx_IT_H */
为什么HAL_UART_Receive_IT函数只能触发一次接收中断
先说出结论,这是由于HAL_UART_Receive_IT函数虽然使能了接收中断,但是再hal库HAL_UART_IRQHandler串口中断处理公共处理函数中,会把重新失能接收中断。
以下是解释:
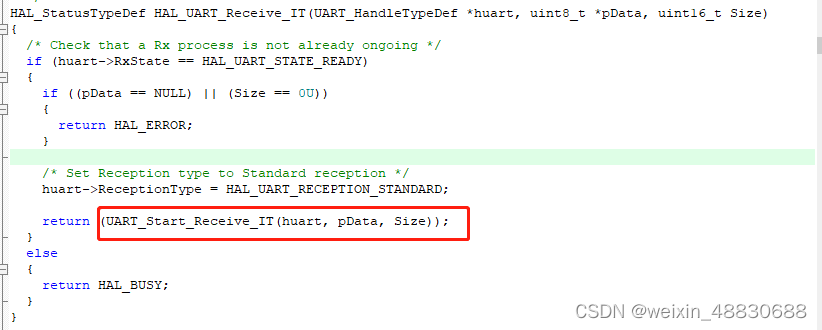
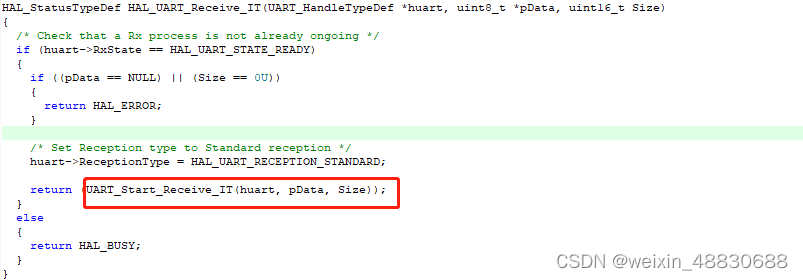
我们进入HAL_UART_Receive_IT函数中可以看到 ,里面产生主要作用的是UART_Start_Receive_IT(huart, pData, Size)这个函数
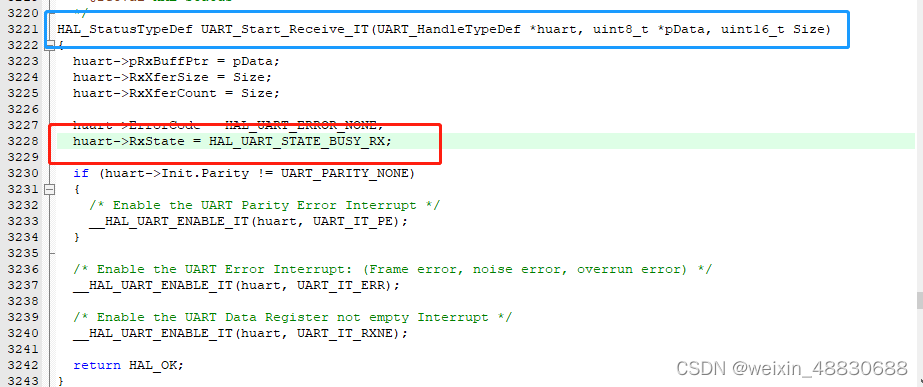
再追下去,发现 __HAL_UART_ENABLE_IT(huart, UART_IT_RXNE);这个才是真正启动接收中断。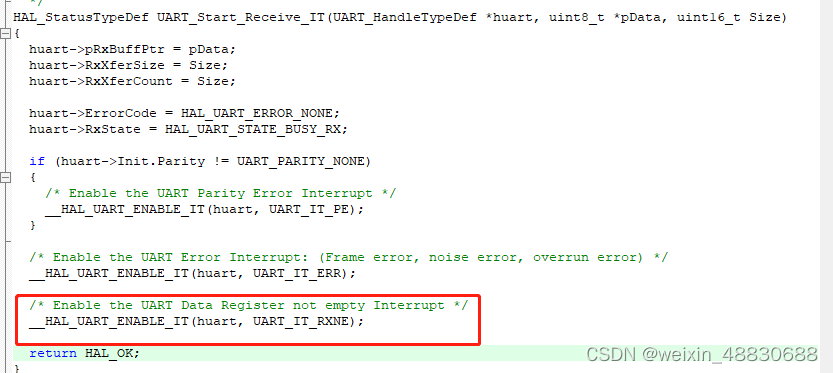
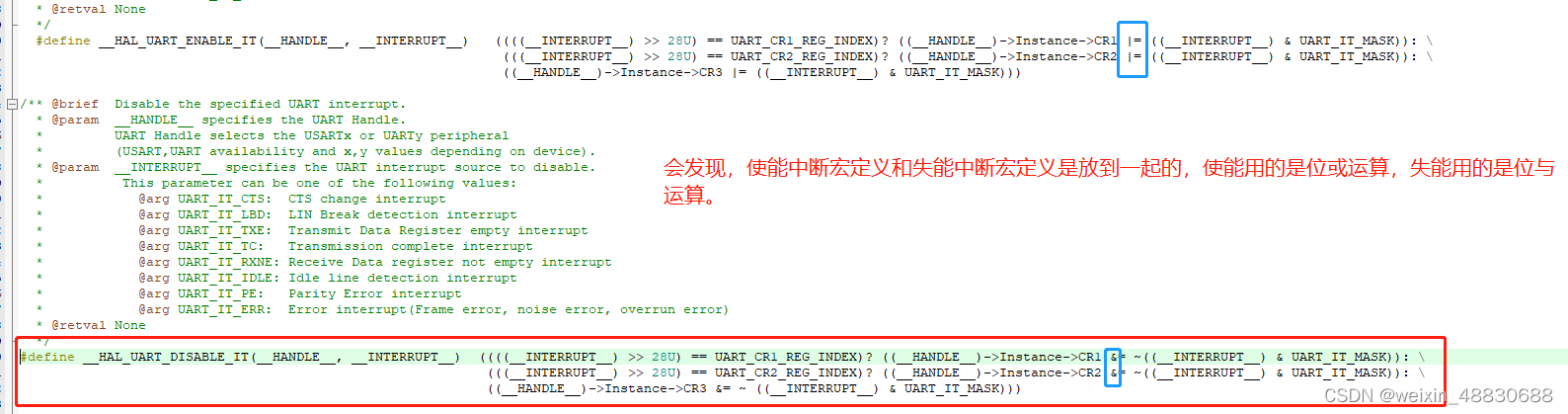
继续追到底,看到这个宏定义我不想分析了。。。。。。又臭又长。但必须学技术嘛,就是要打破砂锅问到底的啦,有代码给我看就很不错了。
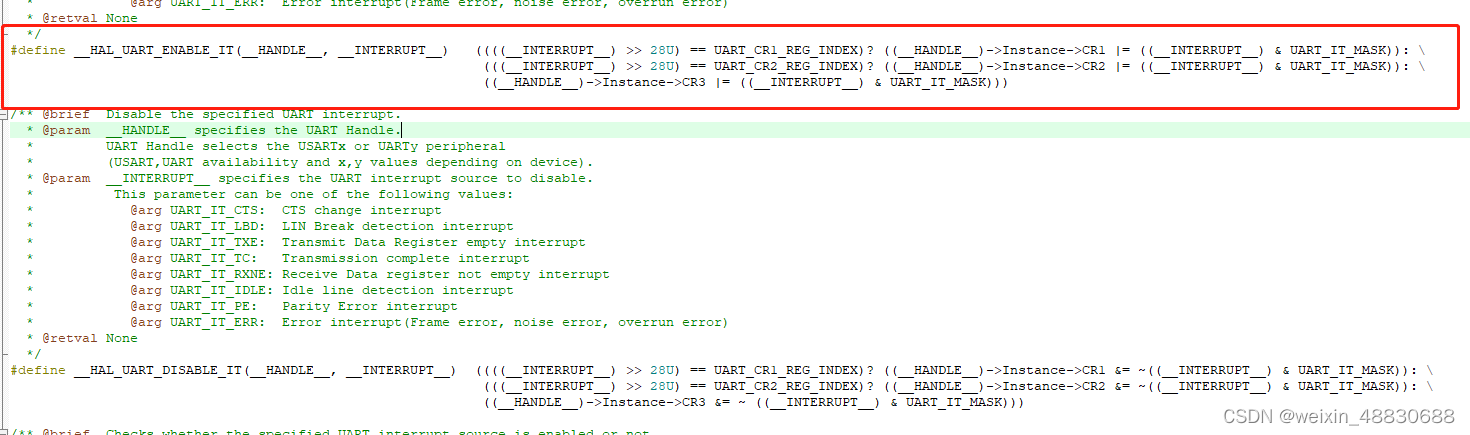
为了说明,把这个宏定义放大一点,仔细看其实是一个三目运算符的嵌套。宏定义的变量1是串口句柄,变量2 是要启动的中断源。我这里选择的是接收中断UART_IT_RXNE


1、
这里的意思是判断((__INTERRUPT__) >> 28U) == UART_CR1_REG_INDEX)是否成立,
成立就执行((__HANDLE__)->Instance->CR1 |= ((__INTERRUPT__) & UART_IT_MASK));
否则执行(((__INTERRUPT__) >> 28U) == UART_CR2_REG_INDEX)? ((__HANDLE__)->Instance->CR2 |= ((__INTERRUPT__) & UART_IT_MASK)): ((__HANDLE__)->Instance->CR3 |= ((__INTERRUPT__) & UART_IT_MASK)))。
2、那就先看看((__INTERRUPT__) >> 28U) == UART_CR1_REG_INDEX)是否成立
(__INTERRUPT__) >> 28U) == UART_CR1_REG_INDEX,[这里的__INTERRUPT__ = UART_IT_RXNE = 0x0800 0020]
( UART_IT_RXNE) >> 28U) = 0x01;而 #define UART_CR1_REG_INDEX 1U
所以,((__INTERRUPT__) >> 28U) == UART_CR1_REG_INDEX)成立。
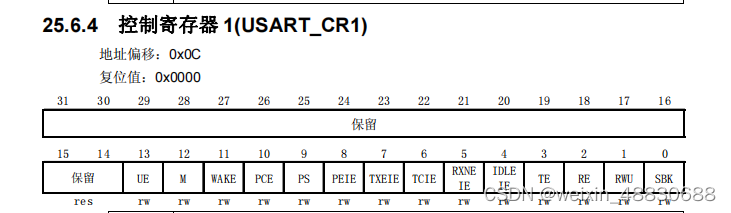
3、成立就执行((__HANDLE__)->Instance->CR1 |= ((__INTERRUPT__) & UART_IT_MASK));[这里的__INTERRUPT__ = UART_IT_RXNE = 0x0800 0020]
而,#define UART_IT_MASK 0x0000FFFFU 所以,((__HANDLE__)->Instance->CR1 |= ((__INTERRUPT__) & UART_IT_MASK)) 。也就是控制寄存器CR1位5置一
HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size)主要就是开了一个接收中断。然后就没了。
至于为什么用这个函数只能触发中断一次,原因在中断处理函数里的 HAL_UART_IRQHandler(UART_HandleTypeDef *huart)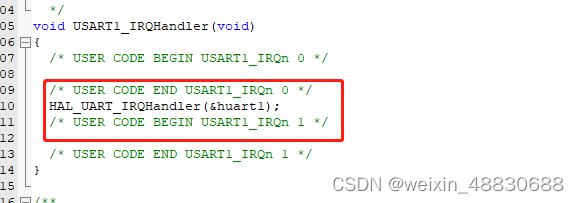
接下来就细究一下 void HAL_UART_IRQHandler(UART_HandleTypeDef *huart),我先粘贴个源码,不用细看,程序正常运行的话其实涉及到的代码很少。
void HAL_UART_IRQHandler(UART_HandleTypeDef *huart)
{
uint32_t isrflags = READ_REG(huart->Instance->SR);
uint32_t cr1its = READ_REG(huart->Instance->CR1);
uint32_t cr3its = READ_REG(huart->Instance->CR3);
uint32_t errorflags = 0x00U;
uint32_t dmarequest = 0x00U;
/* If no error occurs */
errorflags = (isrflags & (uint32_t)(USART_SR_PE | USART_SR_FE | USART_SR_ORE | USART_SR_NE));
if (errorflags == RESET)
{
/* UART in mode Receiver -------------------------------------------------*/
if (((isrflags & USART_SR_RXNE) != RESET) && ((cr1its & USART_CR1_RXNEIE) != RESET))
{
UART_Receive_IT(huart);
return;
}
}
/* If some errors occur */
if ((errorflags != RESET) && (((cr3its & USART_CR3_EIE) != RESET)
|| ((cr1its & (USART_CR1_RXNEIE | USART_CR1_PEIE)) != RESET)))
{
/* UART parity error interrupt occurred ----------------------------------*/
if (((isrflags & USART_SR_PE) != RESET) && ((cr1its & USART_CR1_PEIE) != RESET))
{
huart->ErrorCode |= HAL_UART_ERROR_PE;
}
/* UART noise error interrupt occurred -----------------------------------*/
if (((isrflags & USART_SR_NE) != RESET) && ((cr3its & USART_CR3_EIE) != RESET))
{
huart->ErrorCode |= HAL_UART_ERROR_NE;
}
/* UART frame error interrupt occurred -----------------------------------*/
if (((isrflags & USART_SR_FE) != RESET) && ((cr3its & USART_CR3_EIE) != RESET))
{
huart->ErrorCode |= HAL_UART_ERROR_FE;
}
/* UART Over-Run interrupt occurred --------------------------------------*/
if (((isrflags & USART_SR_ORE) != RESET) && (((cr1its & USART_CR1_RXNEIE) != RESET)
|| ((cr3its & USART_CR3_EIE) != RESET)))
{
huart->ErrorCode |= HAL_UART_ERROR_ORE;
}
/* Call UART Error Call back function if need be --------------------------*/
if (huart->ErrorCode != HAL_UART_ERROR_NONE)
{
/* UART in mode Receiver -----------------------------------------------*/
if (((isrflags & USART_SR_RXNE) != RESET) && ((cr1its & USART_CR1_RXNEIE) != RESET))
{
UART_Receive_IT(huart);
}
/* If Overrun error occurs, or if any error occurs in DMA mode reception,
consider error as blocking */
dmarequest = HAL_IS_BIT_SET(huart->Instance->CR3, USART_CR3_DMAR);
if (((huart->ErrorCode & HAL_UART_ERROR_ORE) != RESET) || dmarequest)
{
/* Blocking error : transfer is aborted
Set the UART state ready to be able to start again the process,
Disable Rx Interrupts, and disable Rx DMA request, if ongoing */
UART_EndRxTransfer(huart);
/* Disable the UART DMA Rx request if enabled */
if (HAL_IS_BIT_SET(huart->Instance->CR3, USART_CR3_DMAR))
{
ATOMIC_CLEAR_BIT(huart->Instance->CR3, USART_CR3_DMAR);
/* Abort the UART DMA Rx channel */
if (huart->hdmarx != NULL)
{
/* Set the UART DMA Abort callback :
will lead to call HAL_UART_ErrorCallback() at end of DMA abort procedure */
huart->hdmarx->XferAbortCallback = UART_DMAAbortOnError;
if (HAL_DMA_Abort_IT(huart->hdmarx) != HAL_OK)
{
/* Call Directly XferAbortCallback function in case of error */
huart->hdmarx->XferAbortCallback(huart->hdmarx);
}
}
else
{
/* Call user error callback */
#if (USE_HAL_UART_REGISTER_CALLBACKS == 1)
/*Call registered error callback*/
huart->ErrorCallback(huart);
#else
/*Call legacy weak error callback*/
HAL_UART_ErrorCallback(huart);
#endif /* USE_HAL_UART_REGISTER_CALLBACKS */
}
}
else
{
/* Call user error callback */
#if (USE_HAL_UART_REGISTER_CALLBACKS == 1)
/*Call registered error callback*/
huart->ErrorCallback(huart);
#else
/*Call legacy weak error callback*/
HAL_UART_ErrorCallback(huart);
#endif /* USE_HAL_UART_REGISTER_CALLBACKS */
}
}
else
{
/* Non Blocking error : transfer could go on.
Error is notified to user through user error callback */
#if (USE_HAL_UART_REGISTER_CALLBACKS == 1)
/*Call registered error callback*/
huart->ErrorCallback(huart);
#else
/*Call legacy weak error callback*/
HAL_UART_ErrorCallback(huart);
#endif /* USE_HAL_UART_REGISTER_CALLBACKS */
huart->ErrorCode = HAL_UART_ERROR_NONE;
}
}
return;
} /* End if some error occurs */
/* Check current reception Mode :
If Reception till IDLE event has been selected : */
if ((huart->ReceptionType == HAL_UART_RECEPTION_TOIDLE)
&& ((isrflags & USART_SR_IDLE) != 0U)
&& ((cr1its & USART_SR_IDLE) != 0U))
{
__HAL_UART_CLEAR_IDLEFLAG(huart);
/* Check if DMA mode is enabled in UART */
if (HAL_IS_BIT_SET(huart->Instance->CR3, USART_CR3_DMAR))
{
/* DMA mode enabled */
/* Check received length : If all expected data are received, do nothing,
(DMA cplt callback will be called).
Otherwise, if at least one data has already been received, IDLE event is to be notified to user */
uint16_t nb_remaining_rx_data = (uint16_t) __HAL_DMA_GET_COUNTER(huart->hdmarx);
if ((nb_remaining_rx_data > 0U)
&& (nb_remaining_rx_data < huart->RxXferSize))
{
/* Reception is not complete */
huart->RxXferCount = nb_remaining_rx_data;
/* In Normal mode, end DMA xfer and HAL UART Rx process*/
if (huart->hdmarx->Init.Mode != DMA_CIRCULAR)
{
/* Disable PE and ERR (Frame error, noise error, overrun error) interrupts */
ATOMIC_CLEAR_BIT(huart->Instance->CR1, USART_CR1_PEIE);
ATOMIC_CLEAR_BIT(huart->Instance->CR3, USART_CR3_EIE);
/* Disable the DMA transfer for the receiver request by resetting the DMAR bit
in the UART CR3 register */
ATOMIC_CLEAR_BIT(huart->Instance->CR3, USART_CR3_DMAR);
/* At end of Rx process, restore huart->RxState to Ready */
huart->RxState = HAL_UART_STATE_READY;
huart->ReceptionType = HAL_UART_RECEPTION_STANDARD;
ATOMIC_CLEAR_BIT(huart->Instance->CR1, USART_CR1_IDLEIE);
/* Last bytes received, so no need as the abort is immediate */
(void)HAL_DMA_Abort(huart->hdmarx);
}
/* Initialize type of RxEvent that correspond to RxEvent callback execution;
In this case, Rx Event type is Idle Event */
huart->RxEventType = HAL_UART_RXEVENT_IDLE;
#if (USE_HAL_UART_REGISTER_CALLBACKS == 1)
/*Call registered Rx Event callback*/
huart->RxEventCallback(huart, (huart->RxXferSize - huart->RxXferCount));
#else
/*Call legacy weak Rx Event callback*/
HAL_UARTEx_RxEventCallback(huart, (huart->RxXferSize - huart->RxXferCount));
#endif /* USE_HAL_UART_REGISTER_CALLBACKS */
}
return;
}
else
{
/* DMA mode not enabled */
/* Check received length : If all expected data are received, do nothing.
Otherwise, if at least one data has already been received, IDLE event is to be notified to user */
uint16_t nb_rx_data = huart->RxXferSize - huart->RxXferCount;
if ((huart->RxXferCount > 0U)
&& (nb_rx_data > 0U))
{
/* Disable the UART Parity Error Interrupt and RXNE interrupts */
ATOMIC_CLEAR_BIT(huart->Instance->CR1, (USART_CR1_RXNEIE | USART_CR1_PEIE));
/* Disable the UART Error Interrupt: (Frame error, noise error, overrun error) */
ATOMIC_CLEAR_BIT(huart->Instance->CR3, USART_CR3_EIE);
/* Rx process is completed, restore huart->RxState to Ready */
huart->RxState = HAL_UART_STATE_READY;
huart->ReceptionType = HAL_UART_RECEPTION_STANDARD;
ATOMIC_CLEAR_BIT(huart->Instance->CR1, USART_CR1_IDLEIE);
/* Initialize type of RxEvent that correspond to RxEvent callback execution;
In this case, Rx Event type is Idle Event */
huart->RxEventType = HAL_UART_RXEVENT_IDLE;
#if (USE_HAL_UART_REGISTER_CALLBACKS == 1)
/*Call registered Rx complete callback*/
huart->RxEventCallback(huart, nb_rx_data);
#else
/*Call legacy weak Rx Event callback*/
HAL_UARTEx_RxEventCallback(huart, nb_rx_data);
#endif /* USE_HAL_UART_REGISTER_CALLBACKS */
}
return;
}
}
/* UART in mode Transmitter ------------------------------------------------*/
if (((isrflags & USART_SR_TXE) != RESET) && ((cr1its & USART_CR1_TXEIE) != RESET))
{
UART_Transmit_IT(huart);
return;
}
/* UART in mode Transmitter end --------------------------------------------*/
if (((isrflags & USART_SR_TC) != RESET) && ((cr1its & USART_CR1_TCIE) != RESET))
{
UART_EndTransmit_IT(huart);
return;
}
}
程序正常运行的话,会运行函数中以下这部分代码
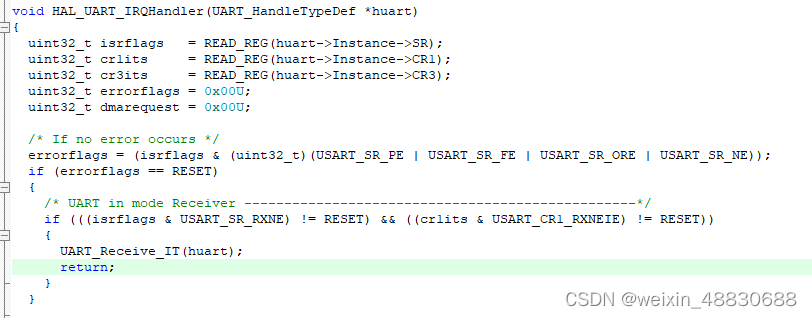
上述代码,由于errorflags 初始化为0。然后isrflags 初始化为串口状态寄存器SR的值。 所以如果没有出现以下的错误,那么就会执行 UART_Receive_IT(huart);这个函数。而HAL_UART_Receive_IT为什么每次只可以触发一次中断的原因就出现在 UART_Receive_IT(huart)这个函数中。哈哈,坚持中,谜底马上就揭晓了。
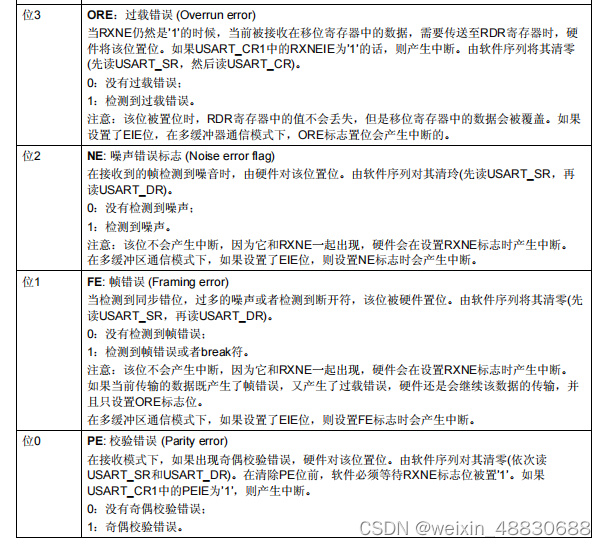
(USART_SR_PE | USART_SR_FE | USART_SR_ORE | USART_SR_NE) 分别对应 校验错误、帧错误、噪声错误、过载错误;状态寄存器会再对应位上置一,所以一旦出现错误errorflags 就不为0。以下是一个数据手册串口状态寄存器的解释:
在 UART_Receive_IT(huart)这个函数中,
static HAL_StatusTypeDef UART_Receive_IT(UART_HandleTypeDef *huart)
{
uint8_t *pdata8bits;
uint16_t *pdata16bits;
/* Check that a Rx process is ongoing */
if (huart->RxState == HAL_UART_STATE_BUSY_RX)
{
if ((huart->Init.WordLength == UART_WORDLENGTH_9B) && (huart->Init.Parity == UART_PARITY_NONE))
{
pdata8bits = NULL;
pdata16bits = (uint16_t *) huart->pRxBuffPtr;
*pdata16bits = (uint16_t)(huart->Instance->DR & (uint16_t)0x01FF);
huart->pRxBuffPtr += 2U;
}
else
{
pdata8bits = (uint8_t *) huart->pRxBuffPtr;
pdata16bits = NULL;
if ((huart->Init.WordLength == UART_WORDLENGTH_9B) || ((huart->Init.WordLength == UART_WORDLENGTH_8B) && (huart->Init.Parity == UART_PARITY_NONE)))
{
*pdata8bits = (uint8_t)(huart->Instance->DR & (uint8_t)0x00FF);
}
else
{
*pdata8bits = (uint8_t)(huart->Instance->DR & (uint8_t)0x007F);
}
huart->pRxBuffPtr += 1U;
}
if (--huart->RxXferCount == 0U)
{
/* Disable the UART Data Register not empty Interrupt */
__HAL_UART_DISABLE_IT(huart, UART_IT_RXNE);
/* Disable the UART Parity Error Interrupt */
__HAL_UART_DISABLE_IT(huart, UART_IT_PE);
/* Disable the UART Error Interrupt: (Frame error, noise error, overrun error) */
__HAL_UART_DISABLE_IT(huart, UART_IT_ERR);
/* Rx process is completed, restore huart->RxState to Ready */
huart->RxState = HAL_UART_STATE_READY;
/* Initialize type of RxEvent to Transfer Complete */
huart->RxEventType = HAL_UART_RXEVENT_TC;
/* Check current reception Mode :
If Reception till IDLE event has been selected : */
if (huart->ReceptionType == HAL_UART_RECEPTION_TOIDLE)
{
/* Set reception type to Standard */
huart->ReceptionType = HAL_UART_RECEPTION_STANDARD;
/* Disable IDLE interrupt */
ATOMIC_CLEAR_BIT(huart->Instance->CR1, USART_CR1_IDLEIE);
/* Check if IDLE flag is set */
if (__HAL_UART_GET_FLAG(huart, UART_FLAG_IDLE))
{
/* Clear IDLE flag in ISR */
__HAL_UART_CLEAR_IDLEFLAG(huart);
}
#if (USE_HAL_UART_REGISTER_CALLBACKS == 1)
/*Call registered Rx Event callback*/
huart->RxEventCallback(huart, huart->RxXferSize);
#else
/*Call legacy weak Rx Event callback*/
HAL_UARTEx_RxEventCallback(huart, huart->RxXferSize);
#endif /* USE_HAL_UART_REGISTER_CALLBACKS */
}
else
{
/* Standard reception API called */
#if (USE_HAL_UART_REGISTER_CALLBACKS == 1)
/*Call registered Rx complete callback*/
huart->RxCpltCallback(huart);
#else
/*Call legacy weak Rx complete callback*/
HAL_UART_RxCpltCallback(huart);
#endif /* USE_HAL_UART_REGISTER_CALLBACKS */
}
return HAL_OK;
}
return HAL_OK;
}
else
{
return HAL_BUSY;
}
}
1、这里面,首先判断一下串口数据是否接收完毕,串口如果仍然处于HAL_UART_STATE_BUSY_RX就继续转换,因为串口一次只能接收8位或者9位数据嘛,实际发送得数据量肯定没这么少,这个if条件程序块里的数据其实挺有趣,有兴趣的朋友可以研究一下。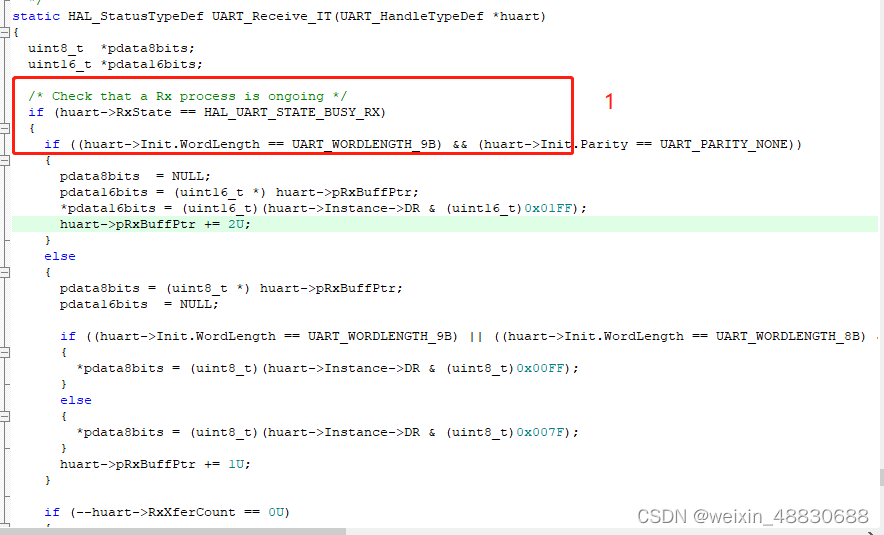
然后 huart->RxState再一开始我们调用HAL_UART_Receive_IT函数时,里面的UART_Start_Receive_IT(huart, pData, Size)中被设置
2、 当每接收完一帧数据就会执行一下 if (--huart->RxXferCount == 0U)程序块,huart->RxXferCount存的是要接收的数据长度,也是在UART_Start_Receive_IT(huart, pData, Size)中被设置,
当条件成立,就表示接收完本次数据,然后执行程序块了的代码,
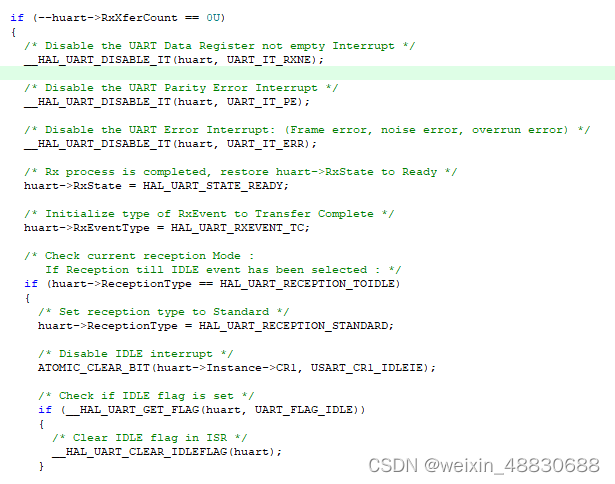
在这段代码中,__HAL_UART_DISABLE_IT(huart, UART_IT_RXNE)函数就是用来关闭接收中断使能的。
另外在这一块代码中,hal库还把串口的状态重新标记成HAL_UART_STATE_READY,数据传输已完成的状态

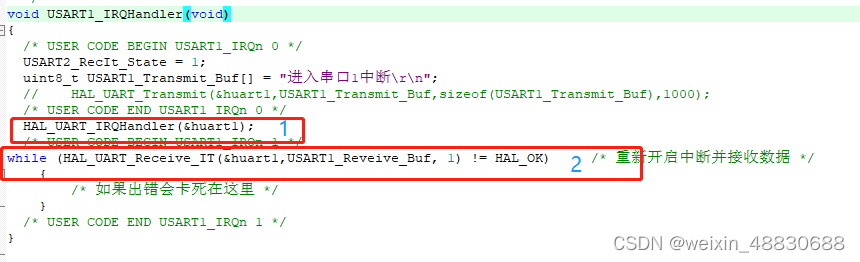
解决办法
到这里就解释完成了,所以如果要用中断接收串口数据,就要在 HAL_UART_IRQHandler(&huart1);串口中断公共处理函数后加上HAL_UART_Receive_IT(&huart1,USART1_Reveive_Buf, 1),就是要重新使能接收中断,迎接下一次的触发。
创作不易,点个赞再走呗

















 2211
2211

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









