






利用vscode对Moveit功能包下ROS程序的调试
学习机械臂开发的时候,默认推荐的学习方法就是啃moveit,这里推荐moveit采用源码安装。这样才能随意改动程序。具体怎么安装参照这个博主的流程就可以,这不是本期内容的重点。源码安装链接: link
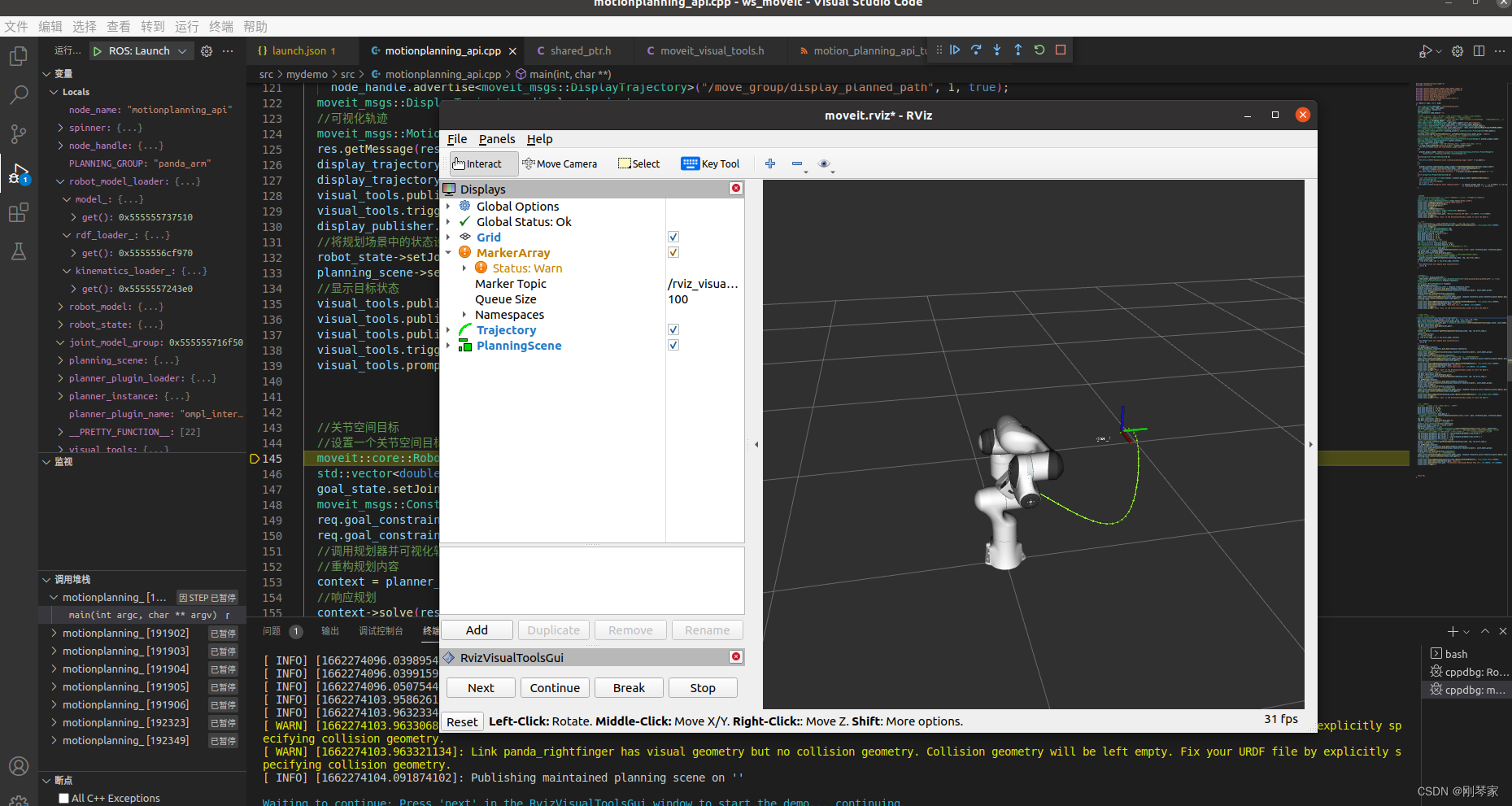
调试结果演示
准备工作
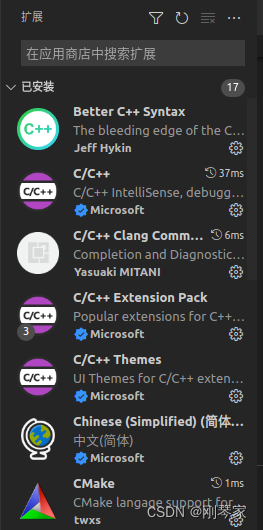
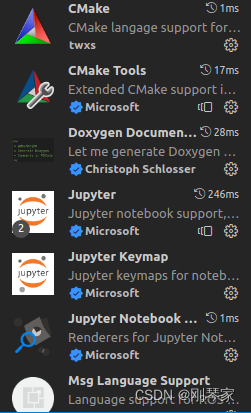
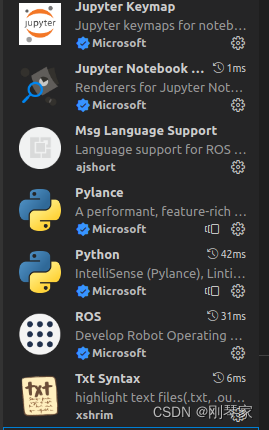
首先先在vscode应用商店里下载几个扩展,具体的如下所示。
其次可以参考这个博主的内容,传送门在这里。链接: link
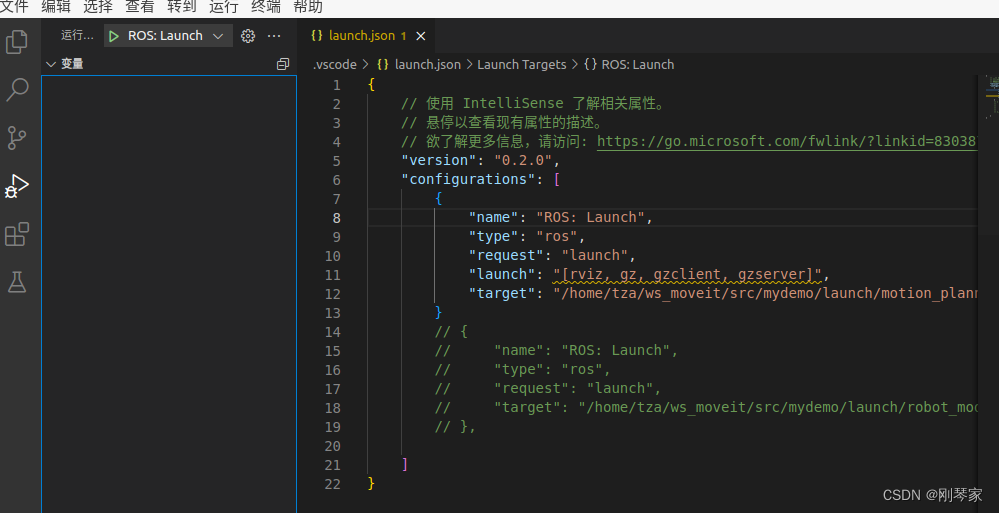
在运行与调试里生成并配置好launch.json文件,其中target传入的内容就是要调试的launch文件的绝对路径。绝对路径可以通过鼠标右键点击目标launch文件,选择《在集成终端中打开》,输入指令pwd便可获得。
下图是本人配置好的launch.json文件
在然后是到源空间文件夹下配置CMakelists.txt文件。在文件的第三行。加入一行指令
set(CMAKE_BUILD_TYPE Debug)
就可以完成操作了,具体操作如下图所示。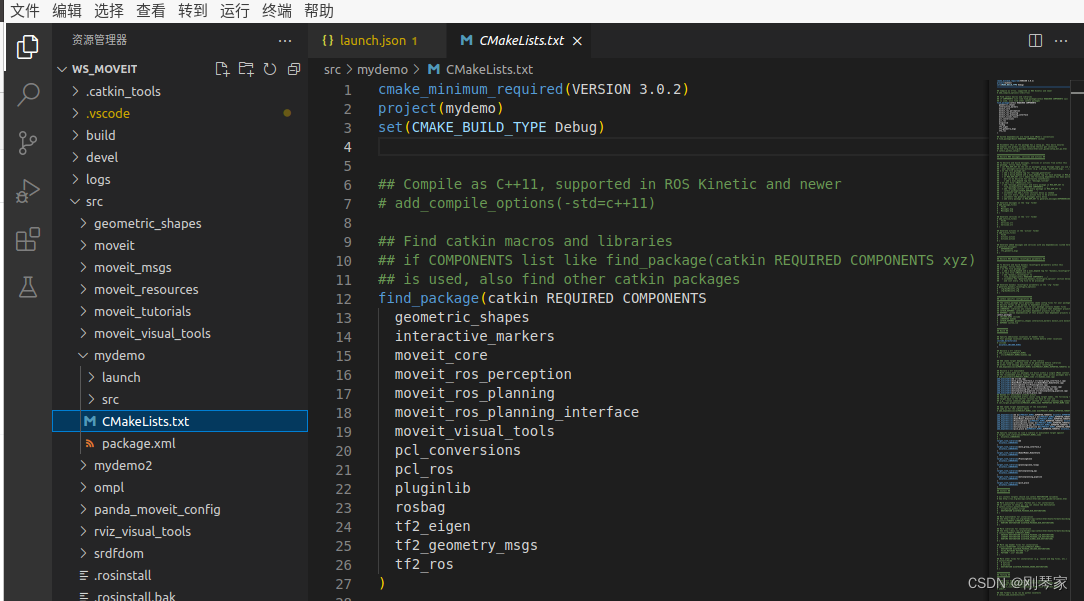
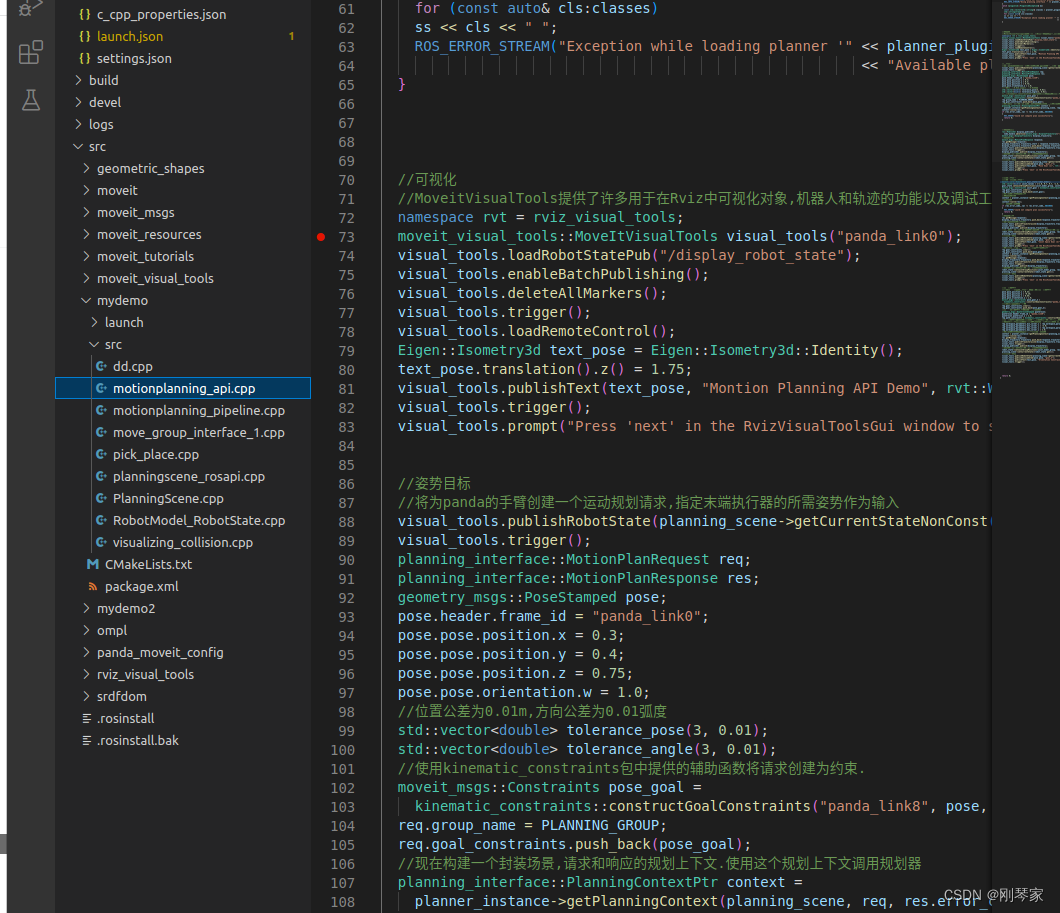
最后在对程序进行编译,并且suorce一下文件。在目标程序中打入断点。当程序进行调试的时候就会跳到断点处,这样便可一步一步对程序进行编译了。
总结
roslaunch文件的调试需要准备的步骤上边已经说明白了 。如果还有疑问就多参考参考其他人的方法。

















 1736
1736

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









