






HenryWJL/hand_eye_calibration (github.com)
git clone GitHub - HenryWJL/hand_eye_calibration
HenryWJL/jaka_grasping (github.com)
git clone https://github.com/HenryWJL/jaka_grasping.git :克隆机器人抓取程序
git clone https://github.com/JAKARobotics/JAKA_ROS_Driver.git :机器人运行程序
git clone https://github.com/pal-robotics/aruco_ros.git :标定程序
相机程序参考:JAKA robot与D435相机连接使用及RVIZ仿真简单操作!_李学成_的博客-优快云博客
一、Hand-Eye Calibration
roslaunch realsense2_camera rs_camera.launch :启动相机节点
roslaunch hand_eye_calibration aruco_single_start.launch :启动标定节点
roslaunch hand_eye_calibration robot_start.launch :启动机器人节点
rosrun hand_eye_calibration hand_to_eye_calib.py :启动手动标定节点
二、JAKA MiniCobo Based Robotic Grasping
rosrun jaka_grasping object_location.py :启动对象位置节点
rosrun jaka_grasping jaka_grasp.py :原神!启动!
错误预警!!!:
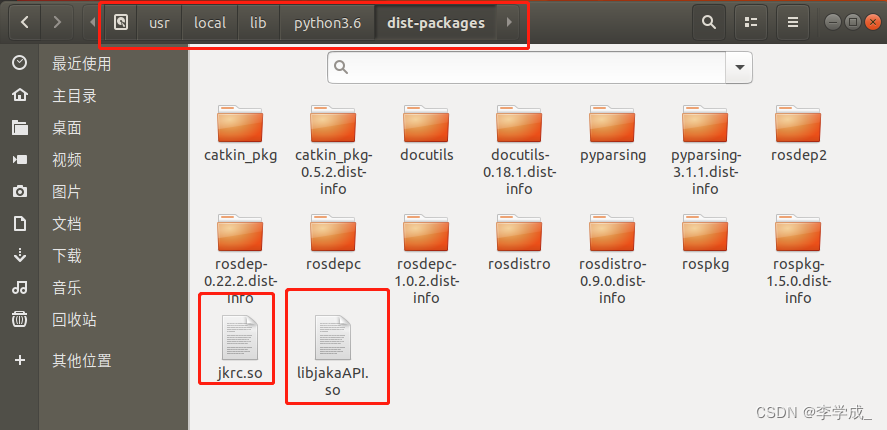
1、No module named 'jkrc' :没有找到‘jkrc’模块包
解决方法:将jkrc.so与libjakaAPI.so放在对应python文件夹目录下
sudo chmod -R 777 /usr/local/lib/python3.6/dist-packages
export LD_LIBRARY_PATH=/usr/local/lib/python3.6/dist-packages:$LD_LIBRARY_PATH
/usr/local/lib/python3.6/dist-packages
针对其他模块包未找到情况或者动态链接库连接失败问题,请参考:
2、段错误(核心已转储)

解决方法:
ulimit -a 查看core文件大小限制
![]()
ulimit -c unlimited 修改这个文件的大小
![]()
修改成功后,按照网上的说法,再运行程序就会生成core文件,一般路径和可执行程序一个路径。
3、安装opencv2报错问题
pip3 install opencv-python==4.2.0.32 -i https://pypi.tuna.tsinghua.edu.cn/simple --verbose
pip3 install opencv-contrib-python==4.2.0.32 -i https://pypi.tuna.tsinghua.edu.cn/simple --verbose


















 2851
2851

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









