







一、运行前必做
1.关闭开机大程序,如何关闭可以参考【小车基础课程】里的“00.开发前的准备”
2.调节四路巡线模块,如何调节可以参考【小车基础教程】‘’07.四路巡线模块状态打印‘’
3.因摄像头受环境光线影响较大,确保环境光线充足,且环境光线均匀。环境光线昏暗将会影响路标识别。
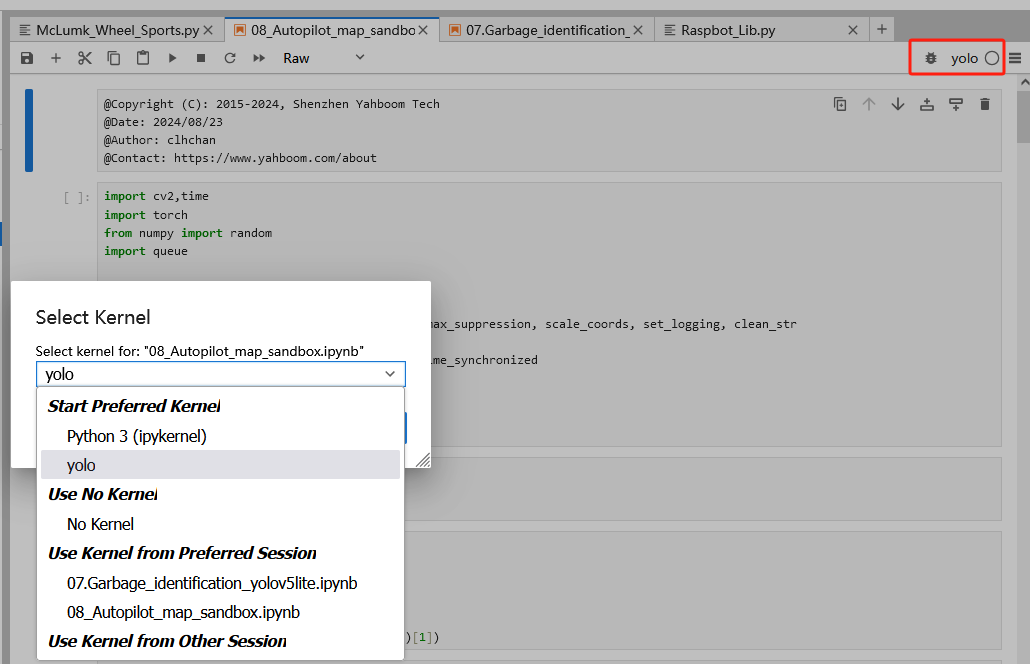
4.启动前将jupyter leb内核环境切换为yolo环境
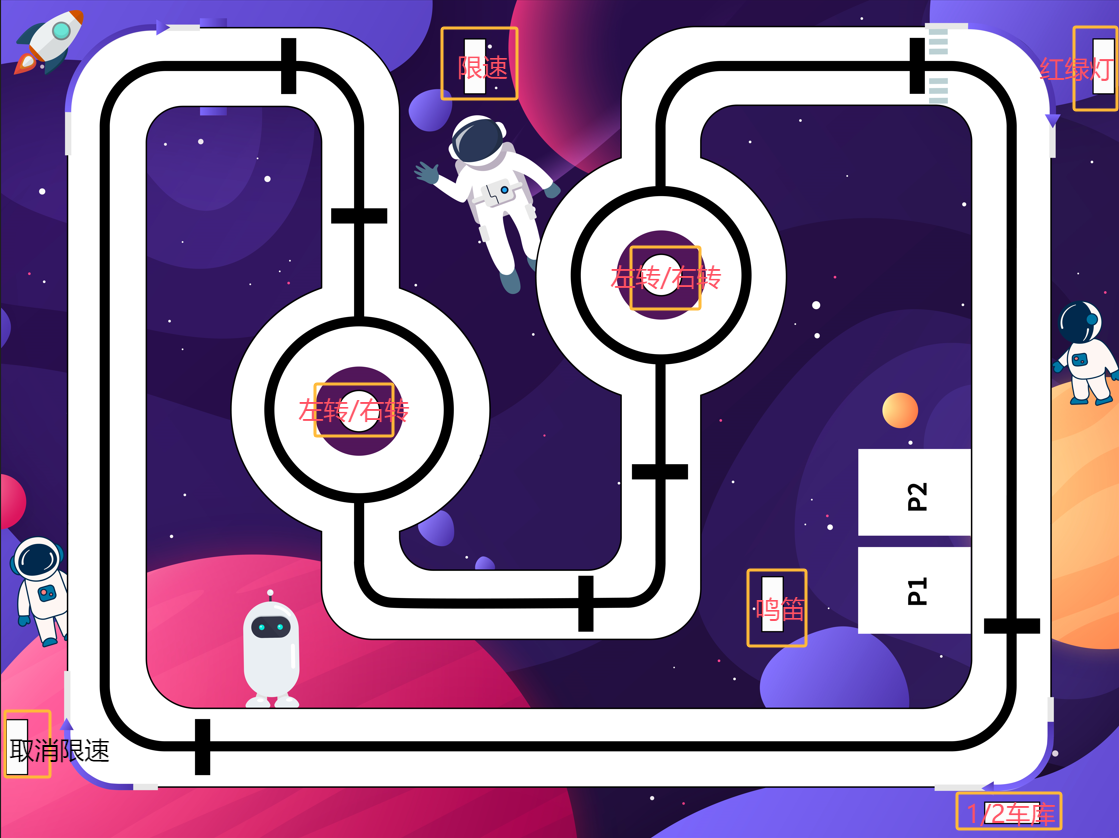
路标摆放说明
路标指示功能说明
|
|
|
|
|
|---|---|---|---|
| 1号车库 | 2号车库 | 鸣笛 | 限速 |
|
|
|
|
|
| 取消限速 | 左转 | 右转 | 红绿灯 |








路标功能解释:
1号车库:小车倒车进1号车库
2号车库:小车倒车进2号车库
鸣笛:小车蜂鸣器响一声
限速:小车减速行驶
取消限速:小车加速行驶
左转:小车执行左转命令
右转:小车执行右转命令
红绿灯:红灯亮小车停止,红灯灭小车前进
二、实验源码
import cv2,time
import torch
from numpy import random
import queue
from models.experimental import attempt_load
from utils.datasets import LoadStreams
from utils.general import check_img_size, non_max_suppression, scale_coords, set_logging, clean_str
from utils.plots import plot_one_box
from utils.torch_utils import select_device, time_synchronized
import sys
sys.path.append('/home/pi/project_demo/lib')
from McLumk_Wheel_Sports import *
#复位舵机 Reset the servo
bot.Ctrl_Servo(1, 90)
bot.Ctrl_Servo(2, 25)
#bgr8转jpeg格式 bgr8 to jpeg format
import enum
def bgr8_to_jpeg(value, quality=75):
return bytes(cv2.imencode('.jpg', value)[1])
#显示摄像头组件 Display camera components
import traitlets
import ipywidgets.widgets as widgets
from IPython.display import display
import time
# 线程功能操作库 Thread function operation library
import threading
import inspect
import ctypes
global classes
classes=classestemp=None
flag=rightrunflag=leftrunflag=1
leftflag=rightflag=pack1flag=pack2flag=stopflag=classflag=0
speed=5 # 速度不宜过快 The speed should not be too fast
image_widget = widgets.Image(format='jpeg', width=640, height=480)
def _async_raise(tid, exctype):
"""raises the exception, performs cleanup if needed"""
tid = ctypes.c_long(tid)
if not inspect.isclass(exctype):
exctype = type(exctype)
res = ctypes.pythonapi.PyThreadState_SetAsyncExc(tid, ctypes.py_object(exctype))
if res == 0:
raise ValueError("invalid thread id")
elif res != 1:
# """if it returns a number greater than one, you're in trouble,
# and you should call it again with exc=NULL to revert the effect"""
ctypes.pythonapi.PyThreadState_SetAsyncExc(tid, None)
def stop_thread(thread):
_async_raise(thread.ident, SystemExit)
def detect(weights='weights/best.pt', source='0', img_size=320, conf_thres=0.70, iou_thres=0.35, device=''):
#Default: best.pt yolov5 model
#best1.pt yolov5lite model
global classes
# Initialize
set_logging()
device = select_device(device)
half = device.type != 'cpu' # half precision only supported on CUDA
# Load model
model = attempt_load(weights, map_location=device) # load FP32 model
stride = int(model.stride.max()) # model stride
imgsz = check_img_size(img_size, s=stride) # check img_size
if half:
model.half() # to FP16
# Set Dataloader
dataset = LoadStreams(source, img_size=imgsz, stride=stride)
# Get names and colors
names = model.module.names if h 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









