







一、背景
STM32的SPI用了很长时间,但一直被CS问题困扰,代码上总是需要添加延时。SPI的分频系数改变之后,延时就要同步进行更改。很麻烦,也很困扰。最终发现,问题出在自己,本不需要这么麻烦。
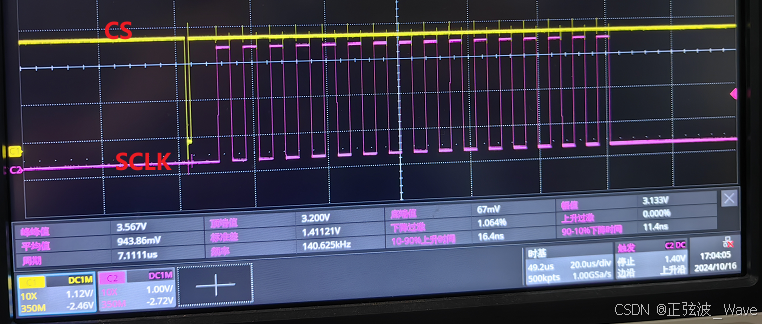
问题波形如下:代码执行如下
`CS_L;
发送,等待发送完成`,
等待接收标志位,接收数据,
//加延时
CS_H`
从波形看,CS并没有等待SPI IP发送和接收完成,就把GPIO_CS拉高了。之前的解决办法就是在CS_H前加适当延时,SCLK分频系数改了之后,延时也去对应修改。很折腾。为什么没有直接在CS_H前加一个较大延时呢?主要是为了尽可能提高通信频率。
二、问题根因
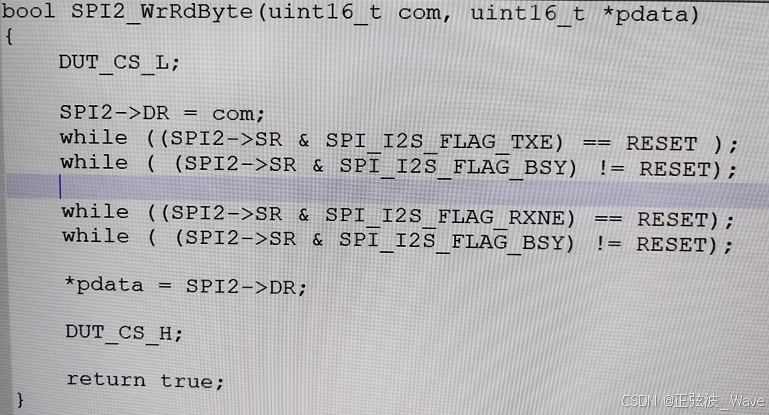
SPI 发送和接收部分代码不正确,等待标志位不正确。
正确代码如下:
bool SPI2_WrRdByte(uint16 t com, uint16 t *pdata)
{
DUT_CS_L;
SPI2->DR = com;
while ((SPI2->SR &SPI_I2S_FLAG_TXE) == RESET ) ;
while (SPI2->SR &SPI_I2S_FLAG_BSY)!= RESET);
while ((SPI2->SR & SPI_I2S_FLAG_RXNE) == RESET);
while ((SPI2->SR & SPI_I2S_FLAG_BSY) != RESET);
*pdata = SPI2->DR;
DUT_CS_H;
return true;
}
三、实际测试
1、SCLK分频系数随便改,都不用再考虑CS拉高之前延时了。SPI选择的是软件片选CS,用GPIO口。
2、MCU是控制流程,C代码最后翻译成机器指令的。理论上代码书写正确,一定是一条一条往下执行的。如果出现跳跃执行现象,那么基本上可以锁定是代码问题,特别是等待标志位的问题。
3、STM32和GD32部分IP 可能存在标志位有出入的问题,上述代码在GD32和STM32上都能正常运行。

















 6719
6719

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









