 最小相位与非最小相位系统解析
最小相位与非最小相位系统解析





最小相位 vs 非最小相位系统:通俗解释 + 数学推导 + 可视化分析
一、相位系统概念回顾
在控制系统和信号处理中,相位(phase) 描述了系统对输入信号的时间延迟特性。系统的“最小相位”与“非最小相位”之分,源于其 零点分布 和 相位特性 的差异。这种差异不仅影响系统的频域相位响应,也直接影响到系统的时域动态特性和可控性。
二、通俗理解
(1)最小相位系统
想象一个反应迅速的运动员:
- 起跑即向前冲;
- 响应快速直接;
- 能量集中在响应初期;
- 行为可预测。
数学特征:所有零点都位于复平面左半部(连续系统)或单位圆内(离散系统)。
(2)非最小相位系统
想象一个先退后进的运动员:
- 起跑时先后仰或反向动作;
- 初始响应方向与最终目标相反;
- 出现“反向”或“过冲”现象;
- 响应速度较慢。
数学特征:至少有一个零点位于复平面右半部(连续系统)或单位圆外(离散系统)。
三、数学推导与理论证明
1. 传递函数定义
设系统传递函数为:
G(s)=K(s−z1)(s−z2)⋯(s−zm)(s−p1)(s−p2)⋯(s−pn)G(s)=K\frac{(s-z_1)(s-z_2)\cdots(s-z_m)}{(s-p_1)(s-p_2)\cdots(s-p_n)}G(s)=K(s−p1)(s−p2)⋯(s−pn)(s−z1)(s−z2)⋯(s−zm)
其中ziz_izi为零点,pip_ipi为极点。
若所有零点满足Re(zi)<0\mathrm{Re}(z_i)<0Re(zi)<0,则称系统为最小相位系统;若存在Re(zi)>0\mathrm{Re}(z_i)>0Re(zi)>0,则为非最小相位系统。
2. 相位与幅值的解析关系(Hilbert变换)
在连续时间系统中,最小相位系统的相位与幅值之间满足 Hilbert变换 关系:
ϕ(ω)=−Hln∣G(jω)∣\phi(\omega)=-\mathcal{H}{\ln|G(j\omega)|}ϕ(ω)=−Hln∣G(jω)∣
也就是说,最小相位系统的相位响应完全由幅频特性唯一确定。
若系统存在右半平面零点,则相位响应将比最小相位系统额外滞后。
设有右半平面零点z0>0z_0>0z0>0,对应的相位附加量为:
Δϕ(ω)=−2tan−1(ωz0)\Delta\phi(\omega)=-2\tan^{-1}\left(\frac{\omega}{z_0}\right)Δϕ(ω)=−2tan−1(z0ω)
此即“非最小相位系统的相位滞后附加量”,说明即使幅频特性相同,非最小相位系统的相位也更滞后。
3. 时域响应差异
以阶跃输入u(t)=1(t)u(t)=1(t)u(t)=1(t)为例:
Y(s)=G(s)⋅1sY(s)=G(s)\cdot\frac{1}{s}Y(s)=G(s)⋅s1
若G(s)G(s)G(s)为最小相位系统,其响应单调上升趋稳;而若G(s)G(s)G(s)含右半平面零点,则初期导数为负,即输出先向反方向偏移后再回归正向稳态。
从数学上看,若传递函数为:
G1(s)=s+as2+2s+2,a>0G_1(s)=\frac{s+a}{s^2+2s+2},\quad a>0G1(s)=s2+2s+2s+a,a>0
与
G2(s)=−s+as2+2s+2G_2(s)=\frac{-s+a}{s^2+2s+2}G2(s)=s2+2s+2−s+a
则两者在极点相同的情况下,G2(s)G_2(s)G2(s)的零点位于右半平面,导致其时域响应初期反向。
四、MATLAB 可视化验证代码
%% 最小相位 vs 非最小相位系统可视化
% 作者:基于用户需求生成
% 日期:当前日期
clear; close all; clc;
%% 定义系统
t = 0:0.01:10;
% 最小相位系统
num_min = [1, 1];
den_min = [1, 2, 2];
sys_min = tf(num_min, den_min);
% 非最小相位系统
num_nonmin = [-1, 1];
den_nonmin = [1, 2, 2];
sys_nonmin = tf(num_nonmin, den_nonmin);
%% 时域响应分析
figure('Position', [100, 100, 1200, 800]);
subplot(2,3,1);
step(sys_min, 'b', sys_nonmin, 'r', t);
title('阶跃响应比较');
legend('最小相位系统', '非最小相位系统', 'Location', 'best');
grid on; ylabel('幅度');
subplot(2,3,2);
impulse(sys_min, 'b', sys_nonmin, 'r', t);
title('脉冲响应比较');
legend('最小相位系统', '非最小相位系统', 'Location', 'best');
grid on; ylabel('幅度');
subplot(2,3,3);
freq = 0.5;
u_sin = sin(2*pi*freq*t);
y_min_sin = lsim(sys_min, u_sin, t);
y_nonmin_sin = lsim(sys_nonmin, u_sin, t);
plot(t, u_sin, 'g--', t, y_min_sin, 'b', t, y_nonmin_sin, 'r');
title('正弦输入响应 (0.5 Hz)');
legend('输入', '最小相位', '非最小相位', 'Location', 'best');
grid on; xlabel('时间 (s)'); ylabel('幅度');
subplot(2,3,4);
[mag_min, phase_min, w_min] = bode(sys_min);
[mag_nonmin, phase_nonmin, w_nonmin] = bode(sys_nonmin);
semilogx(w_min, 20*log10(squeeze(mag_min)), 'b', 'LineWidth', 2);
hold on;
semilogx(w_nonmin, 20*log10(squeeze(mag_nonmin)), 'r', 'LineWidth', 2);
title('幅频特性 (Bode图)');
legend('最小相位', '非最小相位', 'Location', 'best');
grid on; ylabel('幅度 (dB)');
subplot(2,3,5);
semilogx(w_min, squeeze(phase_min), 'b', 'LineWidth', 2);
hold on;
semilogx(w_nonmin, squeeze(phase_nonmin), 'r', 'LineWidth', 2);
title('相频特性 (Bode图)');
legend('最小相位', '非最小相位', 'Location', 'best');
grid on; xlabel('频率 (rad/s)'); ylabel('相位 (度)');
subplot(2,3,6);
pzmap(sys_min, 'b', sys_nonmin, 'r');
title('零极点分布');
legend('最小相位', '非最小相位', 'Location', 'best');
grid on;
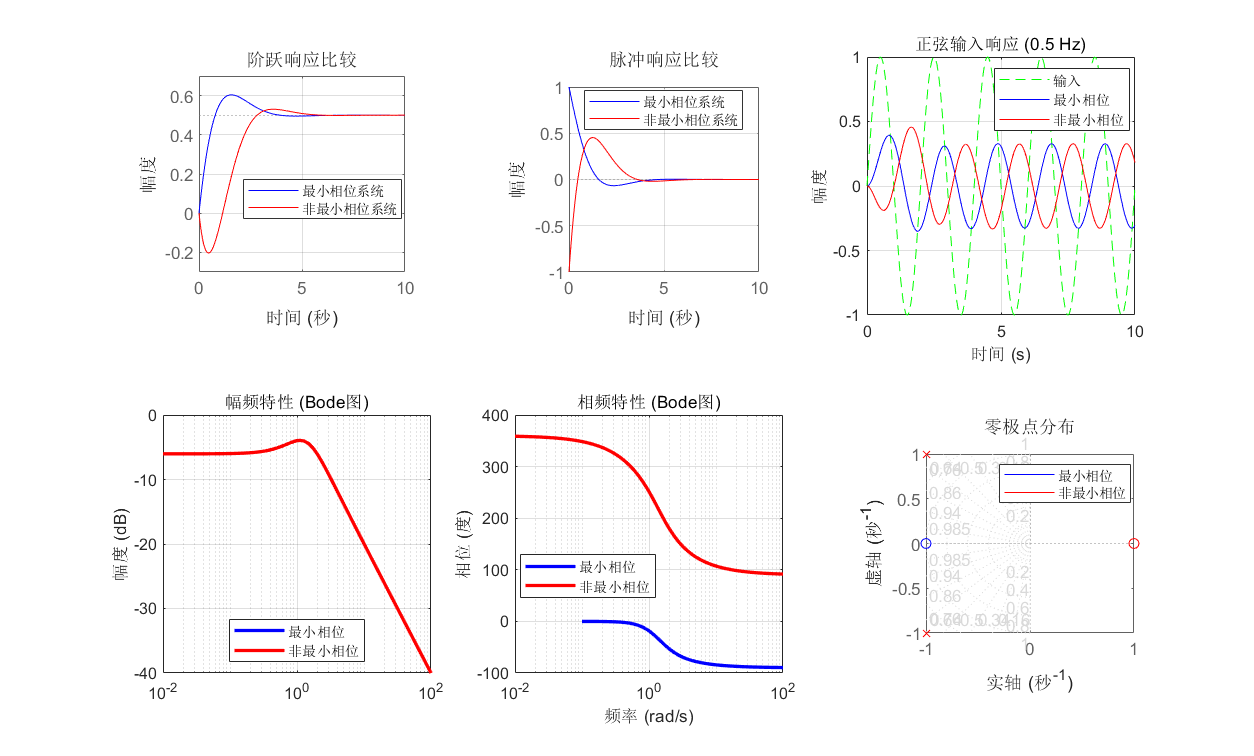
五、结果分析与总结
通过仿真可得:
| 特性 | 最小相位系统 | 非最小相位系统 |
|---|---|---|
| 零点位置 | 左半平面 | 右半平面 |
| 阶跃响应 | 单调上升 | 初期反向响应 |
| 能量分布 | 前段集中 | 分布较散 |
| 相位特性 | 相位滞后小 | 相位滞后大 |
从数学与仿真结果可见:
- 非最小相位系统的右半平面零点引入附加相位滞后;
- 系统的因果性与可逆性在最小相位系统中最优;
- 在控制设计中,非最小相位系统会增加闭环带宽受限与超调风险。
六、应用场景
| 系统类型 | 常见应用 |
|---|---|
| 最小相位系统 | 音频均衡器、控制系统、通信滤波器 |
| 非最小相位系统 | 化工过程、经济系统、存在延迟或逆响应的系统 |
结论:理解最小相位与非最小相位的数学与物理意义,对于系统稳定性分析、频率补偿、信号处理与控制器设计至关重要。



















 6143
6143

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











