







禁止转载
好博客汇总
-
Python点云数据处理(六)Open3d补充:点云基本处理 - 知乎 https://zhuanlan.zhihu.com/p/353971365?utm_id=0
-
open3d绘制点云1–单帧点云 - 知乎 https://zhuanlan.zhihu.com/p/591249741
-
(168条消息) open3D 的使用,pcd可视化,3D bbox可视化,web_visualizer使用等。_CV矿工的博客-优快云博客 https://blog.youkuaiyun.com/ZauberC/article/details/127260203
-
open3d.geometry.AxisAlignedBoundingBox — Open3D 0.17.0 documentation http://www.open3d.org/docs/release/python_api/open3d.geometry.AxisAlignedBoundingBox.html
-
Open3D 可视化(1)——简单可视化_o3d.visualization.draw_geometries_Dove_1234的博客-优快云博客 https://blog.youkuaiyun.com/baidu_39332177/article/details/127792817
-
爆肝5万字❤️Open3D 点云数据处理基础(Python版) - 小智博客 http://imyhq.com/design/312.html#23__191
点云显示(有阴影的那种)
场景:在win用ssh连到Linux,使用Linux的资源渲染点云
步骤
点云可视化-纯色 的
import open3d as o3d
import numpy as np
import matplotlib.pyplot as plt
if __name__ == '__main__':
###############
point_size_set = 3
################
# 加载点云数据
points = np.load('bed_ret_mn40.npy')
points = points[0, :, :]
points = np.concatenate((points, np.zeros_like(points)), axis=-1)
# np.save('C:/Users/mi/Desktop/trash/test_query_pc.npy', points)
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(points[:, :3])
# 将颜色数组赋值给点云对象
pcd.colors = o3d.utility.Vector3dVector(points[:, 3:])
vis = o3d.visualization.Visualizer()
vis.create_window()
opt = vis.get_render_option()
opt.point_size =point_size_set
vis.add_geometry(pcd)
vis.update_geometry(pcd)
vis.run()
vis.destroy_window()
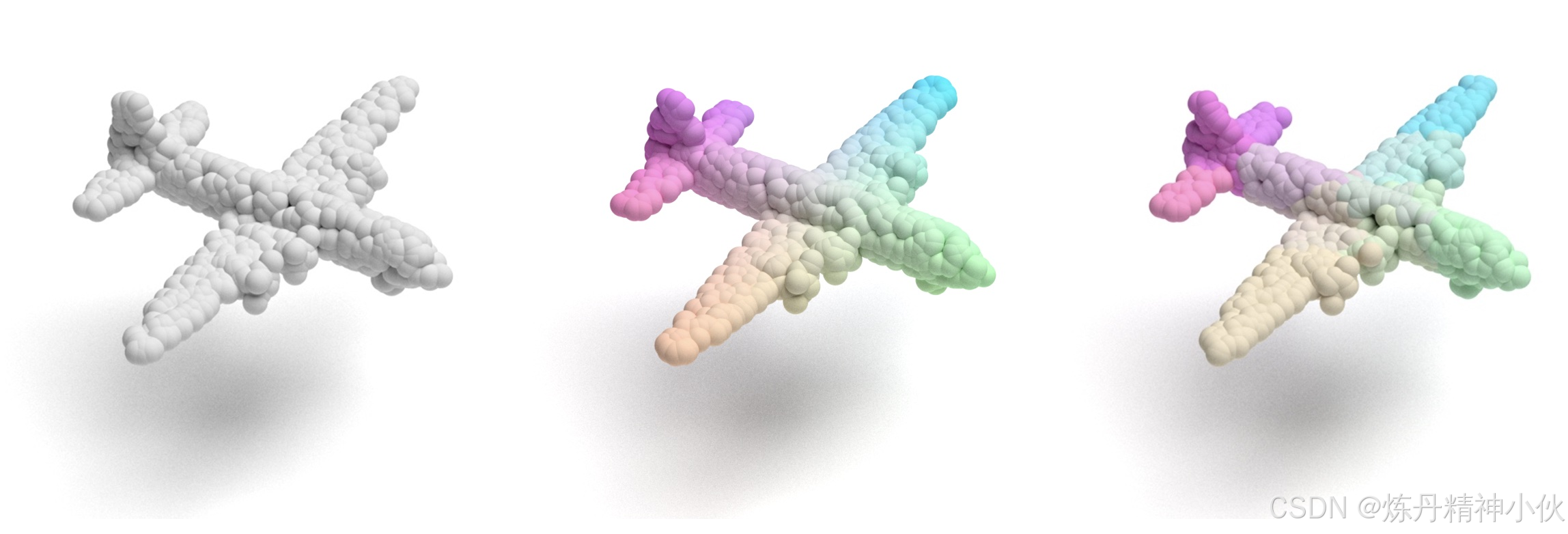
点云可视化
import open3d as o3d
import numpy as np
import matplotlib.pyplot as plt
#### 彩虹色
if __name__ == '__main__':
# 加载点云数据
points = np.load('C:/Users/mi/Desktop/trash/bed_ret_mn40.npy')、
# 注意,我们只需要一个点云,即point 需要是[N,3]
points = points[0, :, :] # 里面有多个点云 [5, 8192,3]
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(points[:, :3])
# 获取高度范围
min_height = np.min(points[:, 2])
max_height = np.max(points[:, 2])
# 根据高度值计算归一化的值
normalized_heights = (points[:, 2] - min_height) / (max_height - min_height)
# 创建彩虹色映射
cmap = plt.cm.get_cmap('rainbow')
# 将归一化的高度值映射到彩虹色映射上
gradient_colors = cmap(normalized_heights)
# 将颜色数组赋值给点云对象
pcd.colors = o3d.utility.Vector3dVector(gradient_colors[:, :3])
# 显示点云
o3d.visualization.draw_geometries([pcd], window_name="pc show", point_show_normal=False,
width=800, height=600)

or
1. 支持设置点云显示的点的大小
2. 可调彩虹色 渐变的轴
import open3d as o3d
import numpy as np
import matplotlib.pyplot as plt
#### 彩虹色
if __name__ == '__main__':
###############
color_dim =1
point_size_set = 15
################
# 加载点云数据
points = np.load('C:/Users/mi/Desktop/trash/shapenet_query_pc/shelf.npy')
# 注意,我们只需要一个点云,即point 需要是[N,3]
# 注意,我们只需要一个点云,即point 需要是[N,3]
# 注意,我们只需要一个点云,即point 需要是[N,3]
# 注意,我们只需要一个点云,即point 需要是[N,3]
# points = points[6, :, :]
# np.save('C:/Users/mi/Desktop/trash/test_query_pc.npy', points)
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(points[:, :3])
# 获取高度范围
min_height = np.min(points[:, color_dim])
max_height = np.max(points[:, color_dim])
# 根据高度值计算归一化的值
normalized_heights = (points[:, color_dim] - min_height) / (max_height - min_height)
# 创建彩虹色映射
cmap = plt.cm.get_cmap('rainbow')
# 将归一化的高度值映射到彩虹色映射上
gradient_colors = cmap(normalized_heights)
# 将颜色数组赋值给点云对象
pcd.colors = o3d.utility.Vector3dVector(gradient_colors[:, :3])
vis = o3d.visualization.Visualizer()
vis.create_window()
opt = vis.get_render_option()
opt.point_size =point_size_set
vis.add_geometry(pcd)
vis.update_geometry(pcd)
vis.run()
vis.destroy_window()

点云语义分割可视化
测试文件Area_5_office_10.npy下载
用open3D可以弹出一个窗口,支持鼠标旋转和放缩,很方便
方案1:npy文件包含位置和颜色
#不显示天花板和天花板上的灯
#coding=utf-8
import open3d as o3d
import numpy as np
np.set_printoptions(suppress=True) # 取消默认科学计数法,open3d无法读取科学计数法表示
data = np.load("C:/Users/mi/Desktop/trash/Area_5_office_10.npy")# point_num, x、y、z、r、g、b、label
data = data[data[:,6]!=0] # 0 cell:去除天花板
data = data[data[:,6]!=12] # 12 :去除天花板上的灯
b = np.array([1 , 1, 1,255, 255, 255]) # 每一列要除的数
np.savetxt('scene.txt', data[:,:6]/b)
# 读取点云并可视化
pcd =o3d.io.read_point_cloud("scene.txt", format='xyzrgb') # 原npy文件中的数据正好是按x y z r g b进行排列
# print(pcd)
o3d.visualization.draw_geometries([pcd], width=1200, height=600)
或者
import open3d as o3d
import numpy as np
from copy import deepcopy
import time
if __name__ == '__main__':
i = 53
dis = 0
points = np.load('F:/temp_save/npy/pc_' + str(i) + '_.npy')
gt = np.load('F:/temp_save/npy/gt_l_' + str(i) + '_.npy').reshape(-1, 1)
pre_point_1 = np.load('F:/temp_save/npy/point_LGMask_pre_l_' + str(i) + '_.npy').reshape(-1, 1)
pre_point_2 = np.load('F:/temp_save/npy/point_2_pre_l_' + str(i) + '_.npy').reshape(-1, 1)
points = np.concatenate([points, gt, pre_point_1, pre_point_2], axis=-1)
# concatenate((a, b, c), axis=0)
points = points[points[:, 6] != 0] # 不要天花板类
points = points[points[:, 2] < 2.5] # 尽量排掉 日光灯
gt = points[:, 6]
pre_point_1 = points[:, 7]
pre_point_2 = points[:, 8]
# 随机生成13个类别的颜色
# colors_0 = np.random.randint(255, size=(13, 3)) / 255.
colors_0 = [[0, 255, 0],
[19, 0, 255],
[0, 255, 255],
[255, 255, 0],
[255, 0, 255],
[100, 100, 255],
[200, 200, 100],
[170, 121, 200],
[255, 0, 0],
[200, 100, 100],
[10, 200, 100],
[200, 200, 200],
[50, 50, 50]]
colors_0 = np.array(colors_0) / 255
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(points[:, :3])
# 显示现实颜色
pcd.colors = o3d.utility.Vector3dVector(points[:, 3:6] / 255)
# gt
pcd1 = deepcopy(pcd)
pcd1.translate((0, dis, 0)) # 整体进行y轴方向平移5
# 为各个预测标签指定颜色
colors = colors_0[gt.astype(np.uint8)]
pcd1.colors = o3d.utility.Vector3dVector(colors[:, :3])
# pre point_1颜色
pcd2 = deepcopy(pcd1)
pcd2.translate((0, dis, 0)) # 整体进行y轴方向平移5
# 为各个预测标签指定颜色
colors = colors_0[pre_point_1.astype(np.uint8)]
pcd2.colors = o3d.utility.Vector3dVector(colors[:, :3])
# pre point_2颜色
pcd3 = deepcopy(pcd2)
pcd3.translate((0, dis, 0)) # 整体进行y轴方向平移5
# 为各个预测标签指定颜色
colors = colors_0[pre_point_2.astype(np.uint8)]
pcd3.colors = o3d.utility.Vector3dVector(colors[:, :3])
# 点云显示
# o3d.visualization.draw_geometries([pcd, pcd1, pcd2, pcd3], window_name="PointNet++语义分割结果",
# point_show_normal=False,
# width=800, # 窗口宽度
# height=600)
vis = o3d.visualization.Visualizer()
vis.create_window()
opt = vis.get_render_option()
opt.point_size =5
opt.background_color = np.asarray([1, 1, 1])
# vis.add_geometry(pcd)
# vis.add_geometry(pcd1)
# vis.add_geometry(pcd2)
vis.add_geometry(pcd3)
vis.update_geometry(pcd)
vis.run()
vis.destroy_window()

方案2:npy 文件 位置跟颜色分离
- 点跟颜色分离处理
- 点由原始的输入提供
- 颜色可自定义为,现实颜色、gt label颜色、pre label 颜色
import open3d as o3d
import numpy as np
from copy import deepcopy
if __name__ == '__main__':
# point_num, x、y、z、r、g、b、label
points = np.load('C:/Users/mi/Desktop/trash/Area_5_office_10.npy')
data = data[data[:,6]!=0] # 0 cell:去除天花板
data = data[data[:,6]!=12] # 12 :去除天花板上的灯
preds = points[:,-1]
print(preds.shape, points.shape)
print(set(preds))
# 随机生成13个类别的颜色
colors_0 = np.random.randint(255, size=(13, 3)) / 255.
# 获取场景的点
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(points[:, :3])
# 为各个真实标签指定颜色
colors = colors_0[points[:, -1].astype(np.uint8)]
pcd.colors = o3d.utility.Vector3dVector(colors[:, :3])
# 显示现实颜色
pcd1 = deepcopy(pcd)
pcd1.translate((0, 5, 0)) # 整体进行y轴方向平移5
pcd1.colors = o3d.utility.Vector3dVector(points[:,3:6]/255)
# 点云显示
o3d.visualization.draw_geometries([pcd, pcd1], window_name="xxx语义分割结果",
point_show_normal=False,
width=800, # 窗口宽度
height=600)

方案3:同时显示现实颜色、gt、pre label
文件下载
import open3d as o3d
import numpy as np
from copy import deepcopy
if __name__ == '__main__':
# pc_num, 6.
#6: xyzrgb
points = np.load('C:/Users/mi/Desktop/trash/pc.npy')
# pc_num
gt = np.load('C:/Users/mi/Desktop/trash/gt_l.npy')
# pc_num, 1
gt = gt.reshape(-1,1)
# pc_num
pre = np.load('C:/Users/mi/Desktop/trash/pre_l.npy')
# pc_num, 1
pre = pre.reshape(-1,1)
points = np.concatenate([points, gt, pre], axis=-1)
# concatenate((a, b, c), axis=0)
points = points[points[:, 6] != 0]
points = points[points[:, 6] != 12]
gt = points[:,6]
pre = points[:,7]
# 随机生成13个类别的颜色
colors_0 = np.random.randint(255, size=(13, 3)) / 255.
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(points[:, :3])
# 为各个真实标签指定颜色
colors = colors_0[gt.astype(np.uint8)]
pcd.colors = o3d.utility.Vector3dVector(colors[:, :3])
# 显示现实颜色
pcd1 = deepcopy(pcd)
pcd1.translate((0, 9, 0)) # 整体进行y轴方向平移5
# 为各个预测标签指定颜色
# colors = colors_0[preds.astype(np.uint8)]
pcd1.colors = o3d.utility.Vector3dVector(points[:,3:6]/255)
# pre 颜色
pcd2 = deepcopy(pcd1)
pcd2.translate((0, 9, 0)) # 整体进行y轴方向平移5
# 为各个预测标签指定颜色
colors = colors_0[pre.astype(np.uint8)]
pcd2.colors = o3d.utility.Vector3dVector(colors[:, :3])
# 点云显示
o3d.visualization.draw_geometries([pcd, pcd1, pcd2], window_name="PointNet++语义分割结果",
point_show_normal=False,
width=800, # 窗口宽度
height=600)

用open3D 可视化点云的方向统一
- 有时候需要将real、gt 和 pred 的图都展示,但视角要统一。
- 先在一个图上(比如 gt )确定展示的视角(鼠标控制)
- ctr+c
- 在新的图(比如real),打开后只需 ctr+v,即可旋转到跟gt一样的视角
区域放大
放大图片区域,在比较语义分割实验效果上有用


import cv2 as cv
import sys
import numpy as np
def big_part_in_img_2(img, need_big_part_pos, big_show_pos, need_big_part_half_l, line_type=1):
time = 4 # 放大倍数
line_big = 5 # 连线的宽度
line_color = (0, 0, 0) # 连线的颜色
rectangle_line_big = 7 # 矩形框的宽度
rectangle_color =(0,0,255) # 矩形框的颜色
big_half_l = need_big_part_half_l * time
# 需要被放大的区域
part = img[(need_big_part_pos[0] - need_big_part_half_l):(need_big_part_pos[0] + need_big_part_half_l),
(need_big_part_pos[1] - need_big_part_half_l):(need_big_part_pos[1] + need_big_part_half_l)]
# 双线性插值法
mask = cv.resize(part, (big_half_l * 2, big_half_l * 2), fx=0, fy=0, interpolation=cv.INTER_LINEAR)
if img is None is None:
print('Failed to read picture')
sys.exit()
# 放大后局部图的位置img[210:410,670:870
# aa = img[(big_show_pos[0] - big_half_l):(big_show_pos[0] + big_half_l),
# (big_show_pos[0] - big_half_l):(big_show_pos[0] + big_half_l)]
img[(big_show_pos[0] - big_half_l):(big_show_pos[0] + big_half_l),
(big_show_pos[1] - big_half_l):(big_show_pos[1] + big_half_l)] = mask
# 画框并连线
cv.rectangle(img, ((need_big_part_pos[1] - need_big_part_half_l), (need_big_part_pos[0] - need_big_part_half_l)),
((need_big_part_pos[1] + need_big_part_half_l), (need_big_part_pos[0] + need_big_part_half_l)),
rectangle_color, rectangle_line_big)
cv.rectangle(img, ((big_show_pos[1] - big_half_l), (big_show_pos[0] - big_half_l)),
((big_show_pos[1] + big_half_l), (big_show_pos[0] + big_half_l)), rectangle_color, rectangle_line_big)
if line_type == 1:
img = cv.line(img, (big_show_pos[1] - big_half_l, big_show_pos[0] + big_half_l),
(need_big_part_pos[1] - need_big_part_half_l, need_big_part_pos[0] - need_big_part_half_l),
line_color,line_big, cv.LINE_AA)
img = cv.line(img, (big_show_pos[1] + big_half_l, big_show_pos[0] + big_half_l),
(need_big_part_pos[1] + need_big_part_half_l, need_big_part_pos[0] - need_big_part_half_l),
line_color,line_big, cv.LINE_AA)
elif line_type == 2:
img = cv.line(img, (big_show_pos[1] - big_half_l, big_show_pos[0] - big_half_l),
(need_big_part_pos[1] + need_big_part_half_l, need_big_part_pos[0] - need_big_part_half_l),
line_color,line_big, cv.LINE_AA)
img = cv.line(img, (big_show_pos[1] - big_half_l, big_show_pos[0] + big_half_l),
(need_big_part_pos[1] + need_big_part_half_l, need_big_part_pos[0] + need_big_part_half_l),
line_color,line_big, cv.LINE_AA)
elif line_type == 3:
img = cv.line(img, (big_show_pos[1] - big_half_l, big_show_pos[0] - big_half_l),
(need_big_part_pos[1] - need_big_part_half_l, need_big_part_pos[0] + need_big_part_half_l),
line_color,line_big, cv.LINE_AA)
img = cv.line(img, (big_show_pos[1] + big_half_l, big_show_pos[0] - big_half_l),
(need_big_part_pos[1] + need_big_part_half_l, need_big_part_pos[0] + need_big_part_half_l),
line_color,line_big, cv.LINE_AA)
elif line_type == 4:
img = cv.line(img, (big_show_pos[1] + big_half_l, big_show_pos[0] - big_half_l),
(need_big_part_pos[1] - need_big_part_half_l, need_big_part_pos[0] - need_big_part_half_l),
line_color,line_big, cv.LINE_AA)
img = cv.line(img, (big_show_pos[1] + big_half_l, big_show_pos[0] + big_half_l),
(need_big_part_pos[1] - need_big_part_half_l, need_big_part_pos[0] + need_big_part_half_l),
line_color,line_big, cv.LINE_AA)
return img
if __name__ == '__main__':
name = 'real'
img = cv.imread('C:/Users/mi/Desktop/trash/vis/'+name+'.png')
img = img[20:-25, 20:-25,:] # 去除图片边缘不要的信息
# cv.imwrite('test.jpg', img)
# 将图换到更大的背景下
arr = np.ones((1500, 2500, 3))*255
arr[0+300:img.shape[0]+300, 0+300:img.shape[1]+300,:] = img
cv.imwrite('test_2.jpg', arr)
img = cv.imread('test_2.jpg')
# exit()
# need_big_part_pos = [200, 1000], 200表示在图的上下滑动位置; 1000表示在图的左右滑动位置
#
# need_big_part_pos 是需要放大的区域中心位置
# big_show_pos是放大后的区域显示的位置
#
# line_type = 3.其中:
# 1:big_show_pos 在need_big_part_pos上边
# 2: big_show_pos 在need_big_part_pos 右边
# 3: big_show_pos 在need_big_part_pos 下边
# 4: big_show_pos 在need_big_part_pos 左边
img = big_part_in_img_2(img,need_big_part_half_l=60, need_big_part_pos = [480, 1100],
big_show_pos = [350, 1750], line_type=2)
img = big_part_in_img_2(img,need_big_part_half_l=60, need_big_part_pos = [550, 930],
big_show_pos = [1100, 600], line_type=3)
# 展示结果
# cv.imwrite(name+'_ed.png', img)
# exit()
h, w = img.shape[:2]
if w > 800:
img = cv.resize(img, (800, int(h * 800 / w)))
cv.imshow('img', img)
cv.waitKey(0)
cv.destroyAllWindows()
目标检测可视化
每个检测的Box,可由
- box_center: box中心的位置,xyz
- box_size:每个Box 长宽高的一半, lwh
- Box_angle:默认box 绕z轴旋转,r
文件下载
import open3d as o3d
import numpy as np
from copy import deepcopy
i =9
# pc_num, xyz
points = np.load('C:/Users/mi/Desktop/trash/box/npy/gt_pc_'+str(i)+'_.npy')
# pc_num, rgb
color = np.load('C:/Users/mi/Desktop/trash/box/npy/color_'+str(i)+'_.npy')
# gt
# box_num,xyz
gt_box_center = np.load('C:/Users/mi/Desktop/trash/box/npy/gt_box_center_'+str(i)+'_.npy')
#box_num,angle
gt_box_angles = np.load('C:/Users/mi/Desktop/trash/box/npy/gt_box_angle_'+str(i)+'_.npy').reshape(-1,1)
# box_num,lwh
gt_box_size = np.load('C:/Users/mi/Desktop/trash/box/npy/gt_box_size_'+str(i)+'_.npy')
point_cloud = o3d.geometry.PointCloud()
point_cloud.points = o3d.utility.Vector3dVector(points[:, :3])
point_cloud.colors = o3d.utility.Vector3dVector(color/255)
vis = o3d.visualization.Visualizer()
vis.create_window()
vis.add_geometry(point_cloud)
gt_boxes = np.concatenate([gt_box_center, gt_box_size, gt_box_angles], axis=-1)
for i, box in enumerate(gt_boxes):
b = o3d.geometry.OrientedBoundingBox()
b.center = box[:3]
b.extent = box[3:6]
# with heading
R = o3d.geometry.OrientedBoundingBox.get_rotation_matrix_from_xyz((0, 0, box[6]))
b.rotate(R, b.center)
b.color = (1,1,0)
vis.add_geometry(b)
# vis.get_render_option().background_color = np.asarray([0, 0, 0]) # 设置一些渲染属性
vis.run()
vis.destroy_window()


















 2192
2192

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









