







《slam十四讲》一书中有解释三角化,结论就是有了对极约束就可以三角化将地图点恢复出来。但是在ORBSLAM中三角化的代码部分,所用到的方法要更高级。
理论——
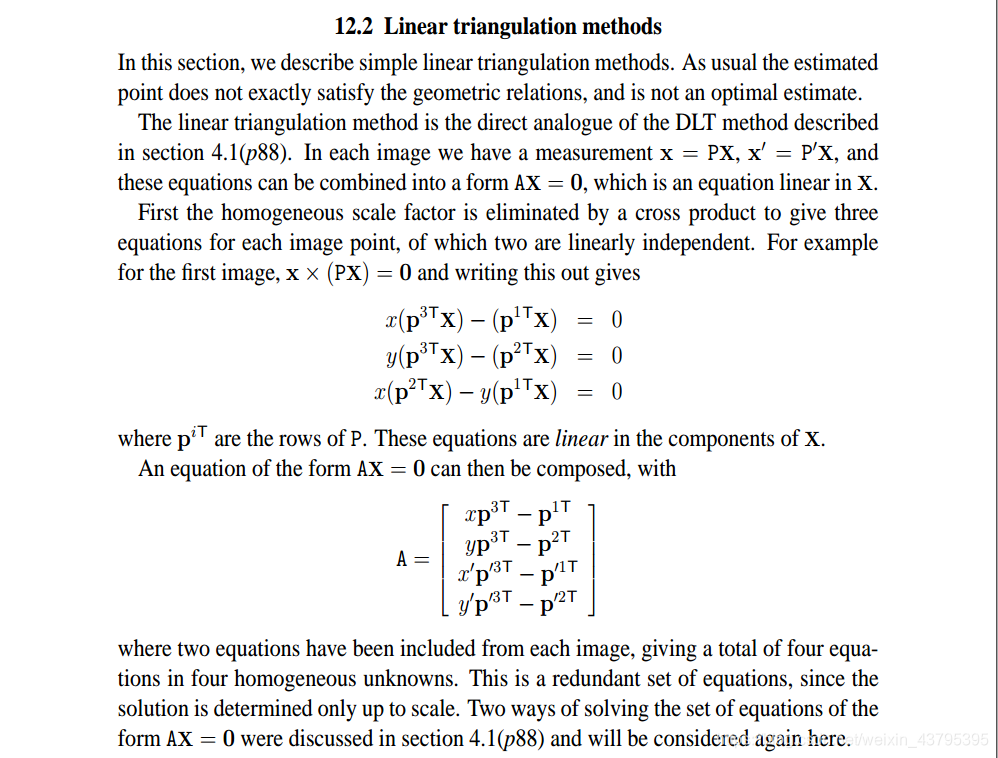
所涉及到的理论参见《Multi View Geometry in Computer Vision》第321页。这一页如下,解释的很简练,你可以再参照书中的其他内容帮助理解。
大致意思就是,得到A矩阵,解AX=0,X即3D点位置。 求解AX=0可以用SVD方法。
实现——
/**
* @brief 给定投影矩阵P1,P2和图像上的点kp1,kp2,从而恢复3D坐标
*
* @param kp1 特征点, in reference frame
* @param kp2 特征点, in current frame
* @param P1 投影矩阵P1
* @param P2 投影矩阵P2
* @param x3D 三维点
* @see Multiple View Geometry in Computer Vision - 12.2 Linear triangulation methods p312
*/
void Initializer::Triangulate(const cv::KeyPoint &kp1, const cv::KeyPoint &kp2, const cv::Mat &P1, const cv::Mat &P2, cv::Mat &x3D)
{
// 在DecomposeE函数和ReconstructH函数中对t有归一化
// 这里 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 2470
2470

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









