






Pybullet导入URDF文件——并创建约束
问题描述
一般地,在Pybullet中导入URDF文件,受到碰撞会产生移动 ;要想将导入的URDF文件固定,类似静态障碍物一样,需要对其另外创建约束。
导入URDF文件
pybullet.loadURDF(path,position,orientation,flags=0):向物理服务器发送信息,加载URDF文件;返回创建模型的ID
path:URDF文件路径position:世界坐标系X、Y、Z三维坐标orientation:四元数useFixedBase:True or False,是否使Base连杆保持固定;注意不是使其整体不动的意思,使其整体不动,需要createConstraint创建约束flags:某些标志
创建约束
pybullet.createConstraint(parentBodyUniqueId, parentLinkIndex, childBodyUniqueId, childLinkIndex, jointType, jointAxis, parentFramePosition, childFramePosition):对两个连杆的关节进行约束
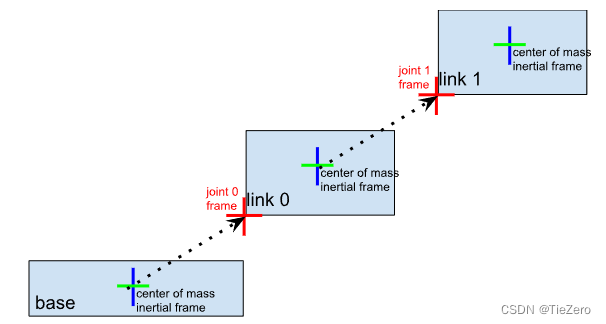
注:关节和连杆的关系如下:
各参数意义(Pybullet官方):
parentBodyUniqueId:父实体索引,loadURDF得到parentLinkIndex:父实体的连杆索引,getNumJoints得到其关节数量,然后利用getLinkState依次输出各关节信息childBodyUniqueId:子实体索引childLinkIndex:子实体的连杆索引jointType:关节的约束类型,如固定等(JOINT_PRISMATIC, JOINT_FIXED, JOINT_POINT2POINT, JOINT_GEAR)jointAxis:在子连杆坐标系表示的关节轴parentFramePosition:关节坐标系相对于父实体质心坐标系的位置(如果父实体为地面,那么则为子实体质心坐标系)childFramePosition:关节坐标系相对于子实体质心坐标系的位置(getJointInfo函数返回的第15个值)- 其他参数省略(非必选参数)
创建一个约束:
floor_id = p.loadURDF('plane.urdf')
box_id = p.loadURDF(fileName='cube_no_rotation.urdf',basePosition=[2,2,0],baseOrientation=p.getQuaternionFromEuler([0, 0, 0]),useFixedBase=True)
p.createConstraint(floor_id, -1, box_id, 0, p.JOINT_FIXED, [0, 0, 0], [2, 2, 0], [0, 0, 0]) # 添加约束
注:有时候URDF文件并非只有一个关节,只固定一个还是会使其运动,所以需要尽可能得使多个关节固定,才能保证最后加载的物体不会移动。
完整代码见:
import pybullet as p
import pybullet_data
import os
# p.connect(p.DIRECT)
p.connect(p.GUI)
p.resetSimulation()
p.setGravity(0,0,-9.8)
p.setTimeStep(1./60)
p.setRealTimeSimulation(0)
p.setAdditionalSearchPath(pybullet_data.getDataPath())
# 加载模型
floor_id = p.loadURDF('plane.urdf')
box_id = p.loadURDF(fileName='cube_no_rotation.urdf',basePosition=[2,2,0],baseOrientation=p.getQuaternionFromEuler([0, 0, 0]),useFixedBase=True)
# 需要改一下自己的路径
robot_id1 = p.loadURDF(fileName='/home/xxx/urdf_and_meshes/robomaster.urdf',basePosition=[-3,2,1],baseOrientation=p.getQuaternionFromEuler([0, 0, 0]))
robot_id2 = p.loadURDF(fileName='/home/xxx/urdf_and_meshes/robomaster.urdf',basePosition=[2,-3,1],baseOrientation=p.getQuaternionFromEuler([0, 0, 0]))
numJoints = p.getNumJoints(box_id)
print("机器人关节的数量:", numJoints)
for index in range(numJoints):
pos = p.getLinkState(box_id,index)
print('rbox_id index is:',pos)
print("机器人关节的信息:")
for joint_index in range(numJoints):
joint_info = p.getJointInfo(box_id, joint_index)
# [0]关节索引:{joint_info[0]}
# [1]关节名称:{joint_info[1]}
# [2]关节类型:{joint_info[2]}
# [3]此主体的位置状态变量中的第一个位置索引:{joint_info[3]}
# [4]在这个物体的速度状态变量中的第一个速度索引:{joint_info[4]}
# [5]保留参数:{joint_info[5]}
# [6]关节阻尼大小:{joint_info[6]}
# [7]关节摩擦系数:{joint_info[7]}
# [8]滑动或旋转关节的位置下限:{joint_info[8]}
# [9]滑动或旋转关节的位置上限:{joint_info[9]}
# [10]关节最大力矩:{joint_info[10]}
# [11]关节最大速度:{joint_info[11]}
# [12]连杆名称:{joint_info[12]}
# [13]在当前连杆坐标系中表示的移动或转动的关节轴(忽略JOINT_FIXED固定关节):{joint_info[13]}
# [14]在父连杆坐标系中表示的关节位置:{joint_info[14]}
# [15]在父连杆坐标系中表示的关节姿态(四元数x、y、z、w):{joint_info[15]}
# [16]父连杆的索引,若是base连杆则返回-1:{joint_info[16]}
# 打印可使用关节
joints_indexes = [i for i in range(numJoints) if p.getJointInfo(box_id, i)[2] != p.JOINT_FIXED] # 可以使用的关节索引
print([p.getJointInfo(box_id, i) for i in joints_indexes])
# 注意因为有四个关节,所以要有四个约束;否则最终还是会移动
cid1 = p.createConstraint(floor_id, -1, box_id, 0, p.JOINT_FIXED, [0, 0, 0], [2, 2, 0], [0, 0, 0]) # 添加约束
cid2 = p.createConstraint(floor_id, -1, box_id, 1, p.JOINT_FIXED, [0, 0, 0], [2, 2, 0], [0, 0, 0]) # 添加约束
cid3 = p.createConstraint(floor_id, -1, box_id, 2, p.JOINT_FIXED, [0, 0, 0], [2, 2, 0], [0, 0, 0]) # 添加约束
cid4 = p.createConstraint(floor_id, -1, box_id, 3, p.JOINT_FIXED, [0, 0, 0], [2, 2, 0], [0, 0, 0]) # 添加约束
while True:
p.stepSimulation()
# 验证小车装上之后,障碍物是否会移动
p.resetBaseVelocity(objectUniqueId=robot_id1,
linearVelocity=[0.1, 0, 0],
angularVelocity=[0, 0, 0],
)
p.resetBaseVelocity(objectUniqueId=robot_id2,
linearVelocity=[0, 0.1, 0],
angularVelocity=[0, 0, 0],
)
PS:
也可以利用createMultiBody函数创建不能移动的障碍物,只需要在创建createCollisionShape、createVisualShape的时候将第一个参数改为GEOM_BOX
box_id = p.createCollisionShape(p.GEOM_BOX, halfExtents=[1+0.05, 1+0.05, 1])# 创建碰撞箱模型
box_visual_id = p.createVisualShape(p.GEOM_BOX,halfExtents=[1, 1, 1],rgbaColor=(0.1, 0.5, 0.1, 1))# 创建视觉模型
OBSTACLES_IDS[index] = p.createMultiBody(baseMass=0,baseCollisionShapeIndex=box_id,baseVisualShapeIndex=box_visual_id,basePosition=[1, 2, 0])

















 7130
7130

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









