




 本文介绍了ROS中的Topic通讯机制,包括Publisher和Subscriber的概念及使用。通过C++示例展示了如何创建发布节点和订阅节点,以及自定义消息的生成。此外,还提供了一个在同一节点内同时订阅和发布Topic的示例。
本文介绍了ROS中的Topic通讯机制,包括Publisher和Subscriber的概念及使用。通过C++示例展示了如何创建发布节点和订阅节点,以及自定义消息的生成。此外,还提供了一个在同一节点内同时订阅和发布Topic的示例。
快速链接:【ROS入门篇】ROS学习简介
一、ROS中Topic通讯机制
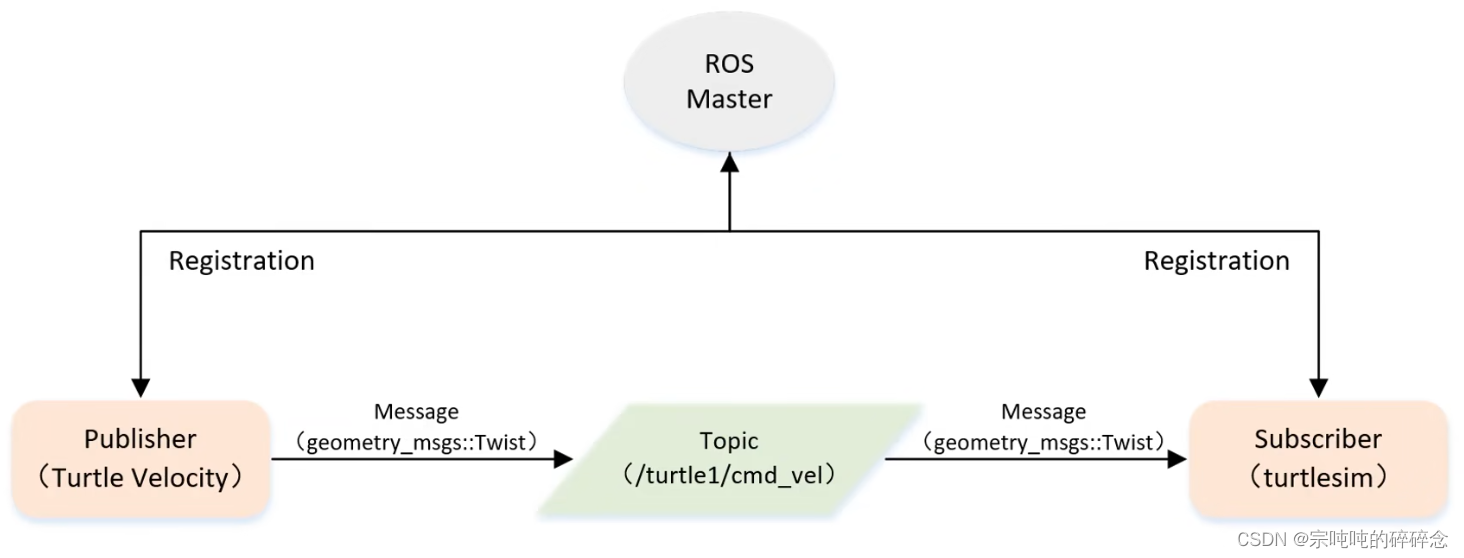
Topic: 异步通讯机制,topic可以同时有多个subscribers,也可以有多个publishers;
Publisher: 向指定话题,发布对应类型的消息;
Sublisher: 订阅话题,一旦话题消息存在,调用回调函数对消息进行处理。
二、Publisher节点示例
- C++实现(古月居案例)
/**
* pub_demo.cpp, 发布turtle/cmd_vel话题,消息类型为geometry_msgs::Twist
*/
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "pub_demo_node");
// 创建ROS节点句柄
ros::NodeHandle n_;
// 创建一个Publisher,发布turtle/cmd_vel话题,消息类型为geometry_msgs::Twist,队列长度为10
ros::Publisher pub_ = n_.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
// 设置循环频率
ros::Rate loop_rate(10);
int count=0;
while(ros::ok())
{
// 初始化类型为geometry_msgs::Twist的消息
geometry_msgs::Twist vel_msg;
vel_msg.linear.x=0.5;
vel_msg.linear.z=0.2;
// 发布消息
pub_.publish(vel_msg);
ROS_INFO("Publish turtle velocity command[%0.2f m/s, %0.2f rad/s]", vel_msg.linear.x, vel_msg.linear.z);
// 按照循环频率执行
loop_rate.sleep();
}
return 0;
}-
修改CMakeLists.txt,配置可执行.cpp文件信息
三、Subscriber节点示例
- C++实现(古月居案例)
/**
* sub_demo.cpp, 订阅/turtle1/pose话题,消息类型为turtlesim::Pose
*/
#include <ros/ros.h>
#include <turtlesim/Pose.h>
void Callback(const turtlesim::Pose::ConstPtr& msg)
{
ROS_INFO("Turtle pose x: %0.6f, y: %0.6f", msg->x, msg->y);
}
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "sub_demo_node");
// 创建ROS节点句柄
ros::NodeHandle n_;
// 创建一个Subscriber,订阅/turtle1/pose话题,消息类型为turtlesim::Pose,队列长度为10,注册回调函数Callback()
ros::Subscriber sub_ = n_.subscribe("/turtle1/Pose", 10, Callback);
// 主程序阻塞在这里,循环等待回调函数
ros::spin();
}- 修改CMakeLists.txt,配置可执行.cpp文件信息
四、自定义消息
- 生成.msg文件,放在msg文件夹内
- 修改CMakeLists.txt和Package.xml文件
/* .msg文件示例,定义了一个表示people的消息类型 */
string name
uint8 sex
uint8 age
uint8 unknow=0
uint8 male=1
uint8 female=2五、PubAndSub节点示例
- 同一节点内订阅一个话题,并发布一个话题
/**
* SubAndPub_demo.cpp
* 订阅/velodyne_points话题,消息类型为sensor_msgs::PointCloud2
* 发布/processed_velodyne_points话题,消息类型为sensor_msgs::PointCloud2
*/
#include <ros/ros.h>
#include <sensor_msgs/PointCloud2.h>
#include <pcl/point_cloud.h>
#include <pcl_conversions/pcl_conversions.h>
#include <pcl_ros/point_cloud.h>
using namespace std;
class SubAndPub
{
private:
ros::NodeHandle n_;
ros::Publisher pub_;
ros::Subscriber sub_;
std::string frame_id_;
public:
SubAndPub();
void callback(const sensor_msgs::PointCloud2& velodyne_sub);
void pub_cloud(ros::Publisher pub_, const pcl::PointCloud<pcl::PointXYZI>::Ptr cloud_out);
};// End of class SubscribeAndPublish
SubAndPub::SubAndPub()
{
// Topic you want to publish
pub_ = n_.advertise<sensor_msgs::PointCloud2>("/processed_velodyne_points",1);
// Topic you want to subscribe
sub_ = n_.subscribe("/velodyne_points", 1, &SubAndPub::callback,this);
}
void SubAndPub::callback(const sensor_msgs::PointCloud2& cloud_in)
{
// do something with the input and generate the output...
frame_id_ = cloud_in.header.frame_id;
pcl::PointCloud<pcl::PointXYZI>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZI>);
pcl::fromROSMsg(cloud_in,*cloud);
pub_cloud(pub_,cloud);
}
void SubAndPub::pub_cloud(ros::Publisher pub_, const pcl::PointCloud<pcl::PointXYZI>::Ptr cloud_out)
{
sensor_msgs::PointCloud2 out;
pcl::toROSMsg(*cloud_out,out);
out.header.frame_id = frame_id_;
pub_.publish(out);
}
int main(int argc, char **argv)
{
// Initiate ROS
ros::init(argc, argv, "SubAndPub_demo_node");
// Create an object of class SubscribeAndPublish that will take care of everything
SubAndPub velodyne;
ros::spin();
return 0;
}- 修改CMakeLists.txt和package.xml,配置可执行.cpp文件信息

















 25
25

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









