Open3D(Python)实现体素降采样、半径滤波和平面检测voxel downsample,removeradius outliers and planar detection
最新推荐文章于 2025-06-19 01:22:36 发布

 1411
64
1411
64

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











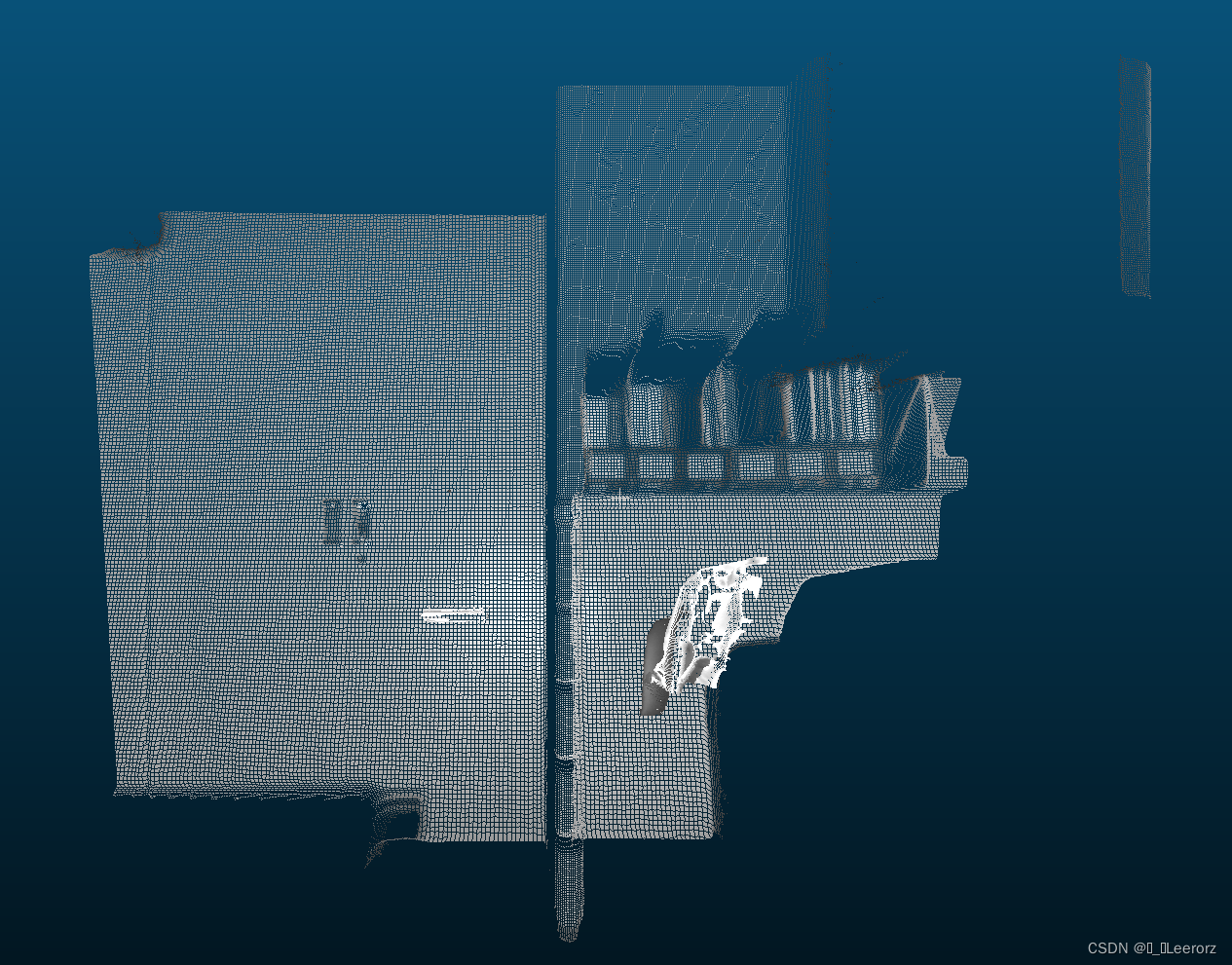
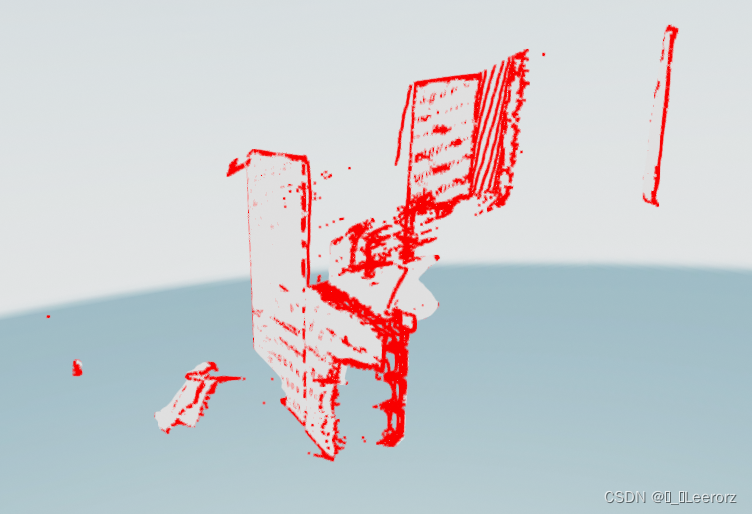
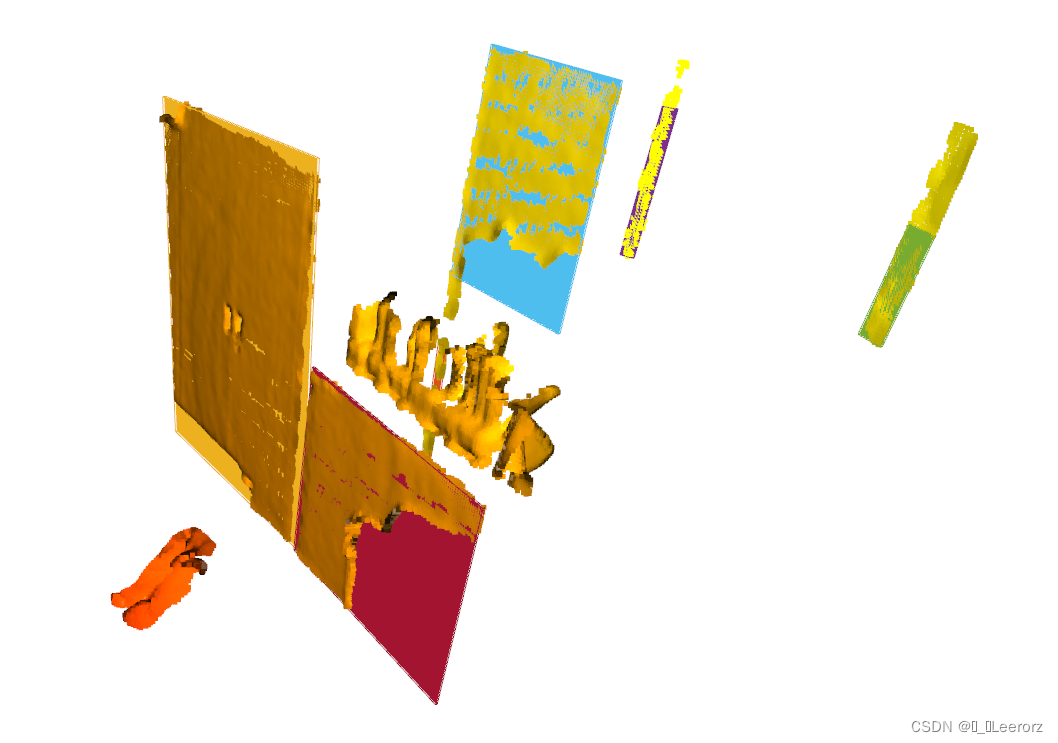
 本文介绍了使用Open3D库在Python中进行体素降采样、半径滤波和平面检测的过程。通过示例展示了原始点云数据到处理后的效果,包括外点红色标记、内点灰色显示以及滤波和检测的最终结果。点云数据ply文件链接提供给读者下载,并承诺无积分也可私信获取。
本文介绍了使用Open3D库在Python中进行体素降采样、半径滤波和平面检测的过程。通过示例展示了原始点云数据到处理后的效果,包括外点红色标记、内点灰色显示以及滤波和检测的最终结果。点云数据ply文件链接提供给读者下载,并承诺无积分也可私信获取。


 订阅专栏 解锁全文
订阅专栏 解锁全文

























