




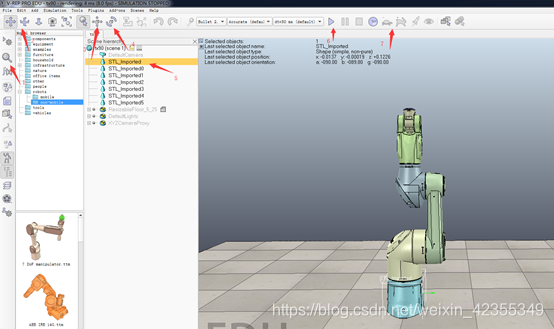
图为tx90导入vrep的示意图。
标记1可以查看更改属性 标记2是移动旋转视图,当然鼠标快捷键也可以,标记3标记4是移动和旋转,可以在添加关节时使用,用来确定关节的位置,标记5是导入的stl文件,双击可以重命名,标记6为开始仿真,标记7的乌龟和兔子可以减慢和加速仿真速度。
1.导入模型
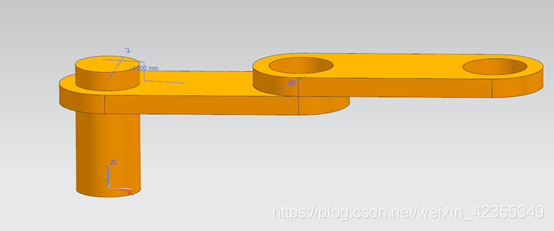
由于tx90模型稍微复杂,本例主要从一个简单的小装配体说起,如下图所示:
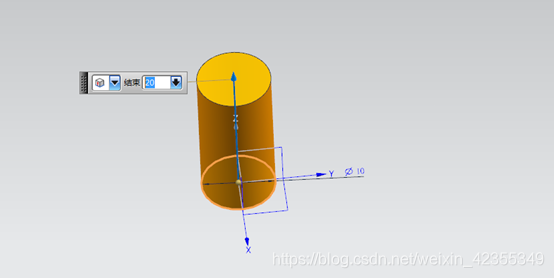
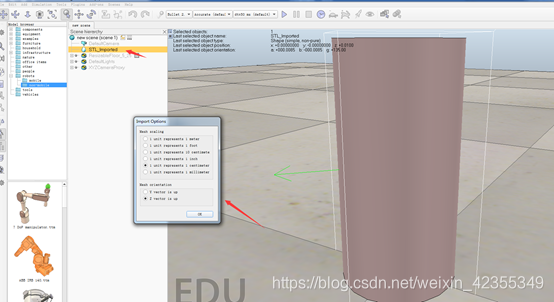
将该连杆模型导入V-REP中,基座几何模型如下,坐标系为底圆中心,将其导出成stl,导入vrep的操作流程是file-import-mesh,这里我选了厘米单位,ug的是Z轴向上,solidworks导入的是Y轴向上
连杆的参数如下:
图中可看出,连杆的坐标系是在底圆孔中心,导入vrep零件坐标系将于世界坐标系重合,有两种方法可以使该连杆导入后为ug图中的位置。
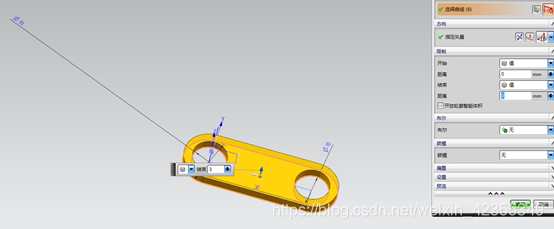
法一 在vrep中移动
直接导入后效果图如下:
vrep初探
最新推荐文章于 2025-06-01 07:35:48 发布
 本文介绍了如何将模型导入V-REP并进行坐标调整,包括通过移动和复制来定位零件,以及添加关节并设置不同模式。此外,还提到了通过编辑实体形状以避免仿真时物体掉落的问题,并探讨了初步的脚本添加和MATLAB/C++与V-REP的通讯概念。
本文介绍了如何将模型导入V-REP并进行坐标调整,包括通过移动和复制来定位零件,以及添加关节并设置不同模式。此外,还提到了通过编辑实体形状以避免仿真时物体掉落的问题,并探讨了初步的脚本添加和MATLAB/C++与V-REP的通讯概念。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2万+
2万+




 到【灌水乐园】发言
到【灌水乐园】发言







