







 本文介绍了CoppeliaSim中的Path对象,用于定义三维运动轨迹,包括Circle和Segment两种类型。通过控制点生成Path,并通过贝塞尔曲线方法平移、旋转和编辑。详细步骤包括导入轨迹、配置机械臂、设置IK元素,最后使用sim.followPath函数实现机械臂按轨迹运动,成功绘制了10条轨迹。
本文介绍了CoppeliaSim中的Path对象,用于定义三维运动轨迹,包括Circle和Segment两种类型。通过控制点生成Path,并通过贝塞尔曲线方法平移、旋转和编辑。详细步骤包括导入轨迹、配置机械臂、设置IK元素,最后使用sim.followPath函数实现机械臂按轨迹运动,成功绘制了10条轨迹。
先介绍一下Path对象:
1. Path对象的使用
Path是CoppeliaSim自带的基本模型,Path用来定义一条三维的运动轨迹,不管是机械臂末端的空间运动轨迹,还是小车在地面上的行进轨迹,都可以使用Path来做。在CoppeliaSim中,使用add来添加Path,主要有2种类型的Path:(1)Circle Type:封闭的圆圈型的Path,Path的首尾相连组成一个连续封闭的路径;
(2)Segment Type:是一种非封闭的路径,基本形状是一个由起始点和终点2个点连接组成的“线段”。
这两种类型的Path是创建复杂Path的基本组件,我们可以使用这两种组件组合来生成多种多样的Path,当然,这两种Path也可以通过设置其属性来相互转换。
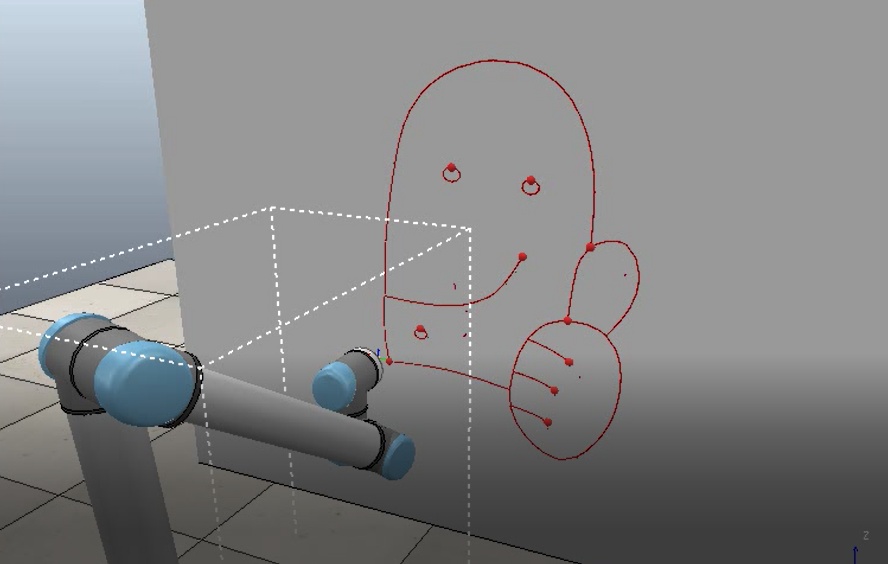
Path是有一些基本的控制点来生成的,我们不用指定Path上的每一个数据点,只需要设置好这些控制点即可,然后CoppeliaSim会使用这些控制点结合贝塞尔曲线方法来生成Path。Path编辑的方式包括平移整条Path,旋转整条Path,新增和删除Path的控制点(下图中的Path point)等。除了平面的Path,通过设置这些控制点的空间位置,我们也可以生成三维空间的Path。
2. 主要操作步骤
< 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









