







 本文详细介绍了如何在Ubuntu 18.04上使用VMware安装ROS Melodic和Gazebo仿真器进行无人机仿真实验。在安装过程中遇到的VMware与Guard兼容性问题以及Gazebo闪退、编译错误等,作者提供了相应的解决方案。通过控制.cpp文件的编写和项目环境搭建,最终实现了无人机的指定飞行。
本文详细介绍了如何在Ubuntu 18.04上使用VMware安装ROS Melodic和Gazebo仿真器进行无人机仿真实验。在安装过程中遇到的VMware与Guard兼容性问题以及Gazebo闪退、编译错误等,作者提供了相应的解决方案。通过控制.cpp文件的编写和项目环境搭建,最终实现了无人机的指定飞行。
写在前面

一、VMware安装Ubuntu18.04
1. 安装过程
VMware和Ubuntu可直接从官网下载。对于Ubuntu的安装也并未难点,只需按照默认的配置操作即可,首次启动会自动安装Ubuntu。
2. 遇到的问题
主要为旧版的VMare与Guard不兼容所导致的。
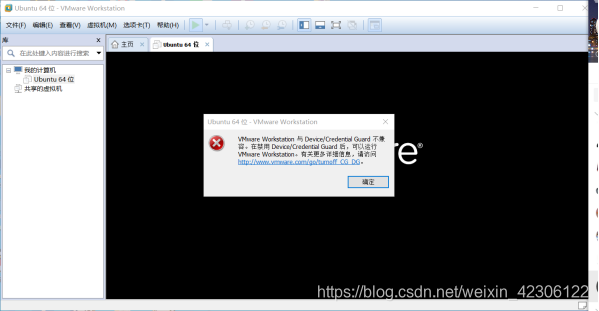
解决办法[2]:以管理员身份运行cmd,运行命令:bcdedit /set hypervisorlaunchtype off。
二、Ubuntu 18.04 ROS melodic版本构建环境和无人机的指定飞行
(基于Ubuntu18.04主要是在16.04是报错较多,且长时间无法解决,所以决定使用18.04来进行编译运行代码)
1. 下载Ubuntu18.04并安装(类似于Ubuntu16.04)
文件目录
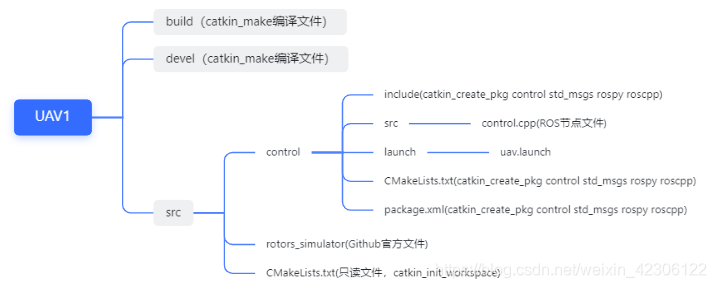
2. 项目环境搭建过程[1,3]
1. 安装ROS环境和Gazebo仿真器
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -sc` main" > /etc/apt/sources.list.d/ros-latest.list'
$ wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
$ sudo apt-get update
$ sudo apt-get install ros-melodic-desktop-full ros-melodic-joy ros-melodic-octomap-ros ros-melodic-mavlink python-wstool python-catkin-tools protobuf-compiler libgoogle-glog-dev ros-melodic-control-toolbox ros-melodic-mavros python-rosdep python-roslaunch
$ sudo rosdep init
$ rosdep upd 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2610
2610

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









