







 作者整理了motion planning的两种分类。一种将其分为path和trajectory,前者侧重整体道路规划,不考虑时间和临时障碍物;后者侧重局部规划,需考虑障碍物。另一种是从上到下分为决策、规划和控制,还提及很多论文中motion planning分类模糊。
作者整理了motion planning的两种分类。一种将其分为path和trajectory,前者侧重整体道路规划,不考虑时间和临时障碍物;后者侧重局部规划,需考虑障碍物。另一种是从上到下分为决策、规划和控制,还提及很多论文中motion planning分类模糊。
最近看论文,整理了两个从不同角度的motion planning的分类。
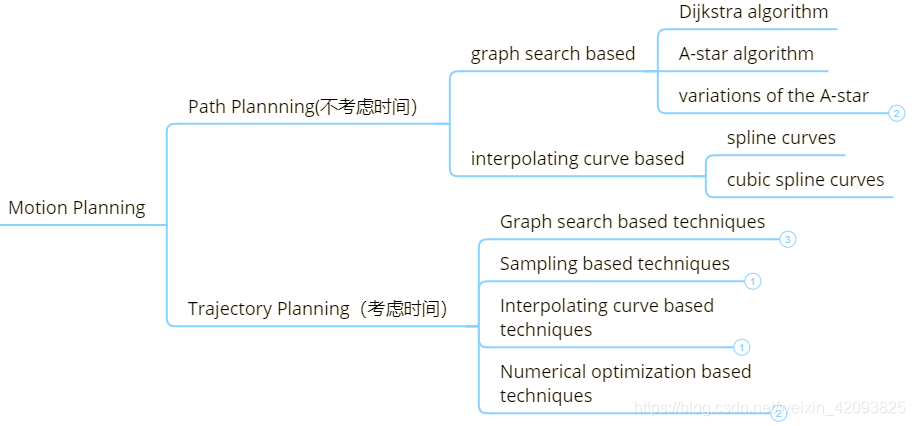
这是比较流行的一种分类方法,将motion planning分为path和trajectory。
path planning侧重的是起点到终点的路径规划,很像高德地图的导航,适用于整体的道路规划,并且不考虑时间,是忽略临时或移动障碍物的前提下做出的规划,解决的是走什么路线到达目的地的问题。
trajectory planning侧重的是局部道路的规划,是在考虑临时或移动障碍物的前提下做出的规划,解决的是如何在避开障碍物的同时尽量沿着路径走的问题,和你看到地图上指示的路线后虽然是沿着路线走但是仍需要看路看车看人看红绿灯一样,重点在避障和遵守交规。
后面列的是两种规划基于不同技术的分类以及分类下一些重要的算法。
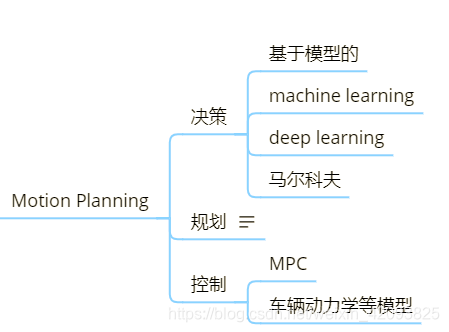
这个分类则是从上到下考虑的。分成决策、规划和控制。
motion planning的分类在很多论文中也是非常模糊,好多作者的分类都是错的。所以我的分类有问题的话欢迎指正,谢谢。
小杨的暑假第一篇csdn…
2019.7.11


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









