







一、什么是智能网联汽车?
智能网联汽车是指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与X(人、车、路、后台等)智能信息交换共享,具备复杂的环境感知、智能决策、协同控制和执行等功能,可实现安全、舒适、节能、高效行驶,并最终可替代人来操作的新一代汽车。如下图所示。
智能网联汽车产业链涉及上游的感知、决策、执行和通信等技术系统、中游的智能驾驶解决方案和整车集成系统、下游的出行、物流和数据应用服务,全新的产业链条重构将是汽车产业史上一次重大的变革。

二、智能网联汽车发展现状
汽车智能网联技术引发了国际上新一轮的科技竞争。奔驰、福特、丰田、沃尔沃等世界顶级汽车制造商分别开展了不同等级的自动驾驶汽车的技术研发工作。同时,近年来以美国的Google、Apple、Intel等公司为代表的IT产业巨头也不遗余力地投入汽车自动驾驶技术领域,Intel公司以153亿美元收购Mobileye公司就是这种激烈竞争的体现,是其建立自动驾驶整体战略中的重要一环。
我国汽车工业已成为世界汽车产业的重要组成部分,智能网联汽车将是继新能源汽车后,汽车产业发展的又一制高点。一汽、上汽、长安、北汽等主要整车企业都制定了智能网联汽车发展的系统战略,北汽基于新能源的自动驾驶汽车实现了面向普通公众的长距离试驾体验,长安更是首次在国内进行了2000公里的自动驾驶公共道路测试试验。包括百度、阿里、华为在内的多家ICT企业也纷纷进军智能网联汽车的技术研发和服务工作,在定位导航、数据挖掘、5G通信等领域逐步形成了自主优势技术。
三、典型应用
1.轨迹规划
轨迹规划的核心就是要解决车辆该怎么走的问题。比如我们知道了附近有行人、骑自行车的人以及前方的卡车,如果我们现在将要左转,该怎么办?这就是轨迹规划该解决的问题。
轨迹规划的输入包括拓扑地图,障碍物及障碍物的预测轨迹,交通信号灯的状态,还有定位导航(因为要知道目的地是哪才能规划路径)、车辆状态等其他信息。而轨迹规划的输出就是一个轨迹,轨迹是一个时间到位置的函数,就是在特定的时刻车辆在特定的位置上。
轨迹规划本质上来说是一个优化问题。谈到优化问题,我们需要知道优化的约束和优化的目标。首先看约束,第一个约束就是车辆要遵守交规,这是强制性的约束;第二个约束是要避免碰撞;第三个约束是要使规划的轨迹在控制上可实现,不能出现规划了一个急弯的轨迹,车根本拐不过来的状况。而优化的目标总的来说就是要跟人开的像,具体表现就是让人乘坐起来感到舒适。但像人也有不同的优化目标,比如我们可以开的稳一点也可以开的急一点,像老司机一点。
2.前向碰撞预警
前车碰撞预警 (Forward Collision Warning)是一项主动安全技术,在检测到本车跟前车有潜在碰撞危险时,进行提醒,防止或减轻追尾事故带来的伤害。一般预警的方式有声音、视觉或者触觉等。
前车碰撞预警在什么场景下有用?
一般来说,以下几种场景容易导致追尾事故:
1)十字路口,绿灯,你前面车辆都突然减速,因为前方有障碍物,而你的车速很快。
2)行车时未注意保持安全车距,你的车距离前车过近。
3)你前方的车辆突然减速转弯,而且未打转向灯。
4)你前方的车辆突然减速给行人让路,但你并没有注意到它的刹车。
前车碰撞预警如何工作?
前车碰撞预警主要利用雷达、图像等传感器来进行监测。一般对本车行驶轨迹内的最近障碍车辆进行预警,并且不受在非本车行驶轨迹内的前方更近障碍物等的影响;在正确识别有效目标的基础上,结合本车当前行驶状况与有效目标运动情况进行决策分析;最终以适时适当的方式提醒驾驶员采取规避措施。在智能网联汽车中是一个重要的应用。
四、发展趋势
以深度学习为代表的人工智能技术在智能网联汽车上正在得到快速应用。尤其在环境感知领域,深度学习技术已凸显出巨大的优势,正在以颠覆性的速度替代传统机器学习方法。深度学习方法需要大量的数据作为学习的样本库,对数据采集和存储提出了较高需求。同时,深度学习技术也存在内在机理不清晰、边界条件不确定等缺点,需要与其他传统方法融合使用以确保可靠性,且目前也受限于车载芯片处理能力的限制。
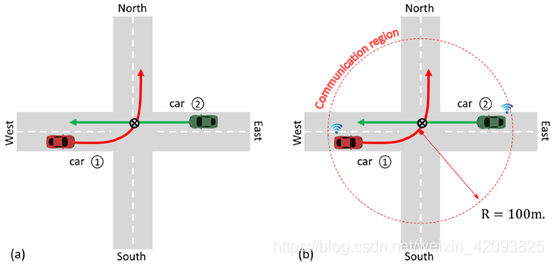
自主式智能与网联式智能技术加速融合。网联式系统能从时间和空间维度突破自主式系统对于车辆周边环境的感知能力。在时间维度,通过V2X通信,系统能够提前获知周边车辆的操作信息、红绿灯等交通控制系统信息以及气象条件、拥堵预测等更长期的未来状态信息。在空间维度,通过V2X通信,系统能够感知交叉路口盲区、弯道盲区、车辆遮挡盲区等位置的环境信息,从而帮助自动驾驶系统更全面的掌握周边交通态势。网联式智能技术与自主式智能技术相辅相成,互为补充,正在加速融合发展。
自动驾驶汽车测试评价方法研究与测试场建设成为热点。自从特斯拉汽车被曝光几起重大安全事故后,自动驾驶汽车的安全性越来越多地受到关注,关于自动驾驶汽车测试评价方法的研究以及测试场、示范区的建设成为全球热点。如何测试自动驾驶汽车?一种潜在的解决方案是引入“普通人类驾驶员”的抽象概念并建立安全基线——一系列定性、定量的关键功能、性能指标,表征自动驾驶系统驾驶汽车的安全程度。如果我们把自动驾驶系统看作一个驾驶员,对其的考核也可以类比驾驶员的考核过程。首先需要“体检”,检查自动驾驶系统对环境感知、车辆控制等的基本能力;其次理论测试,测试自动驾驶汽车对交通法规的遵守能力;再次是场地考,既在特定场景下的自动驾驶测试;最后是实路考核,将自动驾驶汽车放置于特定开放测试道路内进行实际测试。
参考文献:
[1] Safe trajectory planning for autonomous intersection management by using vehicle to infrastructure communication,

















 3795
3795

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









