







 本文介绍了基于V2X的智能驾驶场景库搭建方案,涵盖V2V、V2I、V2N和V2P技术的应用。详细描述了包括前碰撞预警、车辆失控预警、紧急制动灯在内的多个场景设计,以及天气预警、弯道限速预警等V2I技术场景,旨在提升交通安全和自动驾驶性能。
本文介绍了基于V2X的智能驾驶场景库搭建方案,涵盖V2V、V2I、V2N和V2P技术的应用。详细描述了包括前碰撞预警、车辆失控预警、紧急制动灯在内的多个场景设计,以及天气预警、弯道限速预警等V2I技术场景,旨在提升交通安全和自动驾驶性能。
基于V2X的智能驾驶场景库搭建方案v1.0
- V2X概述
V2X即vehicle-to-everything,是一种实现双向通讯和多向通讯的安全系统,类似于WIFI的连接方式,可以让车车之间、车人之间、车与红绿灯等基础设施之间,发送信号,把类似于位置、速度、障碍、危险等情况发送给对方,从而提升行车安全。V2X主要包含vehicle-to-vehicle (V2V),vehicle-to-infrastructure (V2I),vehicle-to-network (V2N)和vehicle-to-pedestrian (V2P)。
- V2X组成结构
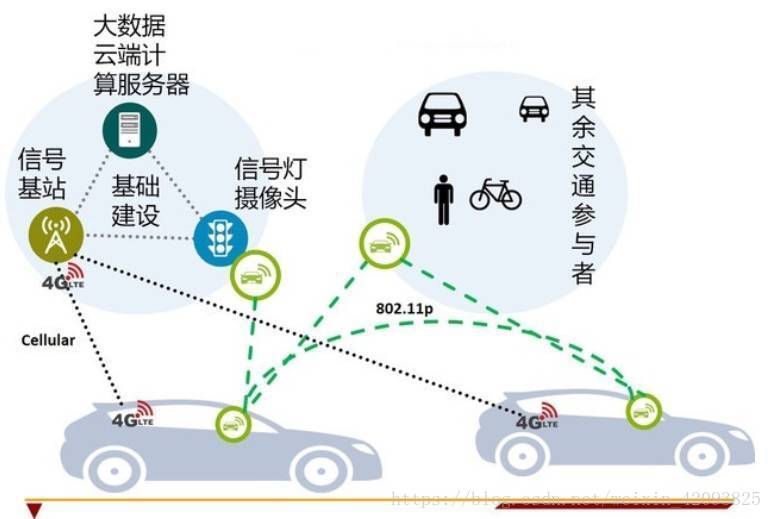
图1-1 v2x组成结构
V2X基本组成结构如图1-1,当车辆具备一定自动驾驶能力后,v2x将起到辅助作用,让自动驾驶更为完美。交通参与者,信号灯,摄像头的信息将通过基站收集信息,发送到大数据服务器,通过服务器算法优化后,再返回基站,随后基站将信息发送到交通参与者,从而让交通效率更高,规避事故。
三.基于v2x的场景库设计
1.基于v2v技术的场景设计
根据场景和汽车驾驶行为不同可分为四类:直行,转向,交叉路口,变道;
1.1直行应用场景
- 前碰撞预警(FCW)
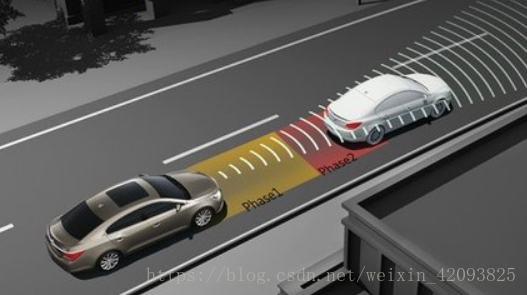
图1-2前碰撞预警(FCW)示意图
定义:如图1-2,前车碰撞预警 (Forward Collision Warning)是一项主动安全技术,在检测到本车跟前车有潜在碰撞危险时,进行提醒,防止或减轻追尾事故带来的伤害。一般预警的方式有声音、视觉或者触觉等。
测试目的:测试v2x对前方车辆不同车速状态的处理
场景设计:前碰撞预警可以根据前车状态分为四类,包括前车制动,前车减速,正常行驶以及v2x实验车前突然插入车辆。当前车制动时,v2x接收到相关信息,进行信息处理,实验车做出减速或制动行为,防止与前车发生碰撞;当前车减速时,实验车在接收到减速信号后,做出减速或制动行为,防止碰撞行为的发生;当前车正常行驶时,实验车保持安全距离和当前车速行驶;当实验车前方突然插入车辆时,v2x能及时接收到这一信息,随之车辆做出制动行为,避免追尾。
影响因素:前车车速,前车加速度,实验车车速,实验车加速度,两车车距,天气状况(风,雨,雪,雾,冰雹,晴天),测试区信号强度,路面状况(路面状态,车道线类型)。
- 车辆失控预警(CLW)

图1-3 车辆失控预警(CLW)示意图
定义:如图1-3所示,车辆失控预警即当车流中车辆本身出现失控情况时,能及时把自身状态发到周围,让周围的车辆能感知到失控信号。
测试目的:测试v2x对于失控或检测到失控行为时的处理能力
场景设计:根据定义,需要分别测试v2x对于失控信号的发送和接收,分别让实验车A和实验车B以匀速行驶在测试道路上,A车在前,B车在后,两车保持一定的安全距离,首先让A车模拟失控,发出失控信号,检测B车是否收到A车的失控信号并减速,随后,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 801
801

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









