




深入浅出ros2时间同步
多传感器时间同步中提到,
ROS2提供了message_filters来进行时间同步,message_filters类似一个消息缓存,分别订阅不同的需要融合的传感器的topic,当消息到达message_filters的时候,可能并不会立即输出,而是在稍后的时间点里满足一定条件下输出,message_filters并不会修改各个topic传过来的数据(也就是缓冲区中的数据),而是将各个缓冲区建立时间线,然后根据时间线上的各个时间点来判断是否需要输出。
理论部分
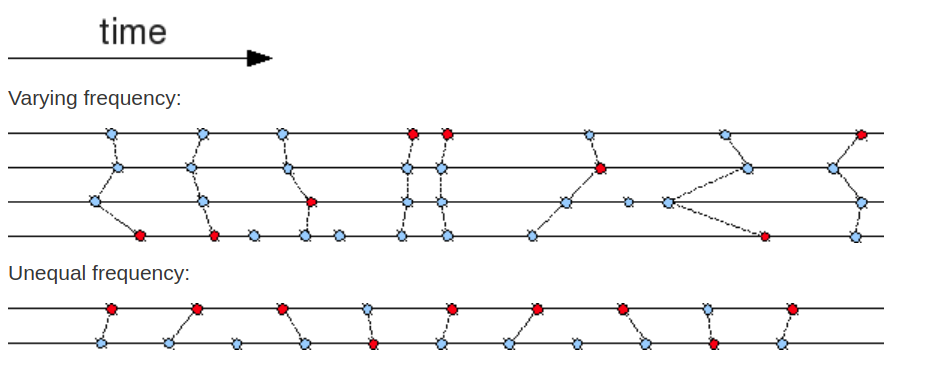
ros2时间同步有两种策略,ExactTime Policy和ApproximateTime Policy,前者需要严格的时间匹配,而ApproximateTime Policy则提供了时间窗口的匹配逻辑。WIKI上描述如下:
令 S 为最后发布的集合,T 为下一个正在创建的集合。其工作原理如下
- 发布集合S
当一个集合S被发布时,对于每一个topic,时间戳小于 m a x t { S } max_{t}\{S\} maxt{ S}的数据都将被丢弃 - 更新消息队列
每一个topic生成一个指定长度的queue, 新的消息按照到达的顺序插入到各自topic的队列中。 - 寻找pivot消息
一旦每个topic的队列中至少有一个消息,就会找到队首消息中最新的那个,称为pivot消息。pivot消息是创建集合T的基石,时间匹配机制都依赖于pivot消息,记pivot消息对应的时间戳为 t p i v o t t_{pivot} tpivot - 构建集合Tm
对于所有topic中每比 t p i v o t t_{pivot} tpivot要大的消息m,找到一个最小的集合Tm,按时间顺序检查消息m,如果下一个消息还不能确定,就等待直到队列达到指定大小。 - 发布最小集合Tm
一旦到达pivot消息,就意味着所有的Tm都已经被枚举出来,或者当可以使用各种界限证明已经找到了最小的Tm时,就发布最小的Tm。
代码部分
说实话,WIKI的描述有点云里雾里,不结合代码的话很难理解,Talk is cheap, show me the code
ApproximateTimeSynchronizer集成自TimeSynchronizer和SimpleFilter
SimpleFilter <- TimeSynchronizer <- ApproximateTimeSynchronizer
初始化
通过TimeSynchronizer.connectInput初始化队列,每个ros topic初始化一个队列,注册add回调函数, 添加到input_connections列表。队列实际上是字典的形式。消息的毫秒时间戳作为key,消息体为value,消息先进先出
def __init__(self, fs, queue_size):
SimpleFilter.__init__(self)
self.connectInput(fs)
self.queue_size = queue_size
self.lock = threading.Lock()
def connectInput(self, fs)< 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 114
114

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









