







 超级会员免费看
超级会员免费看
 本文介绍了双相机在定位中的应用,从单相机到双相机的过渡,详细阐述了如何进行上下相机的标定和纠偏计算。通过9点标定确定相机中心,结合相机间的固定偏移值,计算物料在下相机图像中心到上相机mark点的平移。当涉及到角度纠偏时,通过角度差计算物料在下相机对应的角度。强调角度统一在下相机计算,并以图像中心作为参考点的重要性,确保定位项目的重复性。
本文介绍了双相机在定位中的应用,从单相机到双相机的过渡,详细阐述了如何进行上下相机的标定和纠偏计算。通过9点标定确定相机中心,结合相机间的固定偏移值,计算物料在下相机图像中心到上相机mark点的平移。当涉及到角度纠偏时,通过角度差计算物料在下相机对应的角度。强调角度统一在下相机计算,并以图像中心作为参考点的重要性,确保定位项目的重复性。
双相机的定位场景很多,一般都是机器人先吸住一个物料,下相机拍物料,然后上相机再拍放料位置,然后进行纠偏.
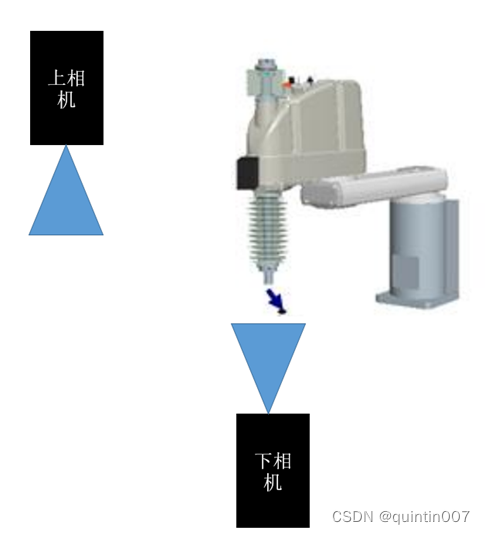
之前讲解的都是单相机的定位,现在多了一个相机,很多人就有点发懵了
我们先假设以下一个场景
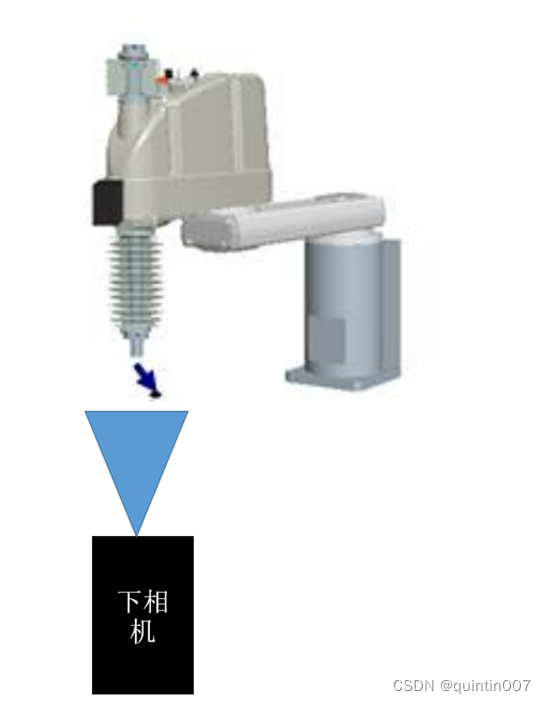
1,项目刚上的时候只有下相机,没有上相机,那么这时候的定位,按照之前的教程(定位教程4—固定相机先抓后拍)
我们先将拍摄的物料,移动到图像中心,然后再加上一个固定偏移,就达到了我们的要的定位纠偏效果。
2,但是项目跑了一段时间,发现放料的地方,产品来料差异很大,导致XY有偏移,这时候要加上一个上相机,这时候我们要标定上相机,只需要机器人吸着一个mark板,来进行9点标定即可,不用标定旋转中心!
开始计算前,我们先明白一点上下两个相机的中心是固定的,两个相机中心在机器人坐标下的位置差,也是一个固定的difX,difY,(不要问这两个值是怎么来的,问就是凑的! )
在下相机,那

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 7560
7560

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











