







 超级会员免费看
超级会员免费看
 本文介绍了机器人旋转中心标定的重要性以及常见的三点法、五点法。强调了五点法在处理FA镜头畸变时的优势,并提供Halcon代码示例,展示如何通过仿射变换求解旋转中心和偏移量,同时提醒注意旋转中心的不准确性及其对误差的影响。
本文介绍了机器人旋转中心标定的重要性以及常见的三点法、五点法。强调了五点法在处理FA镜头畸变时的优势,并提供Halcon代码示例,展示如何通过仿射变换求解旋转中心和偏移量,同时提醒注意旋转中心的不准确性及其对误差的影响。
提起旋转中心标定,那就不得提为什么要标定旋转中心?
我们将红点A移动A’,并且把底边对齐
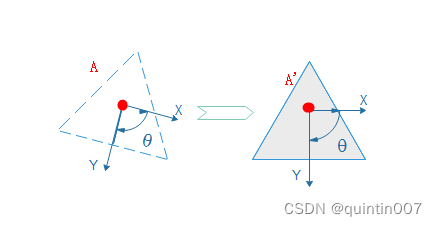
没有做过的人,会说这还不简单,x-x,y-y,u-u,不就是偏移值了么?

有这样想法的,忽视了一个重要的条件,那就是他平移过去后,默认是绕着A’的点旋转的
但
注意了,这一点很重要,那就是实际中的旋转,基本上不会是绕着产品的中心去旋转的!!!

机器人吸的位置,与产品的中心偏差是不确定的.
正确的做法如图所示
1,A点先绕着旋转中心点旋转到B点,对齐角度
2,从B点平移到A’点
3,那么偏移量 就是 B.x-A’.x B.y-A’.y 角度差 是两个位置的角度值

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 5730
5730

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











