










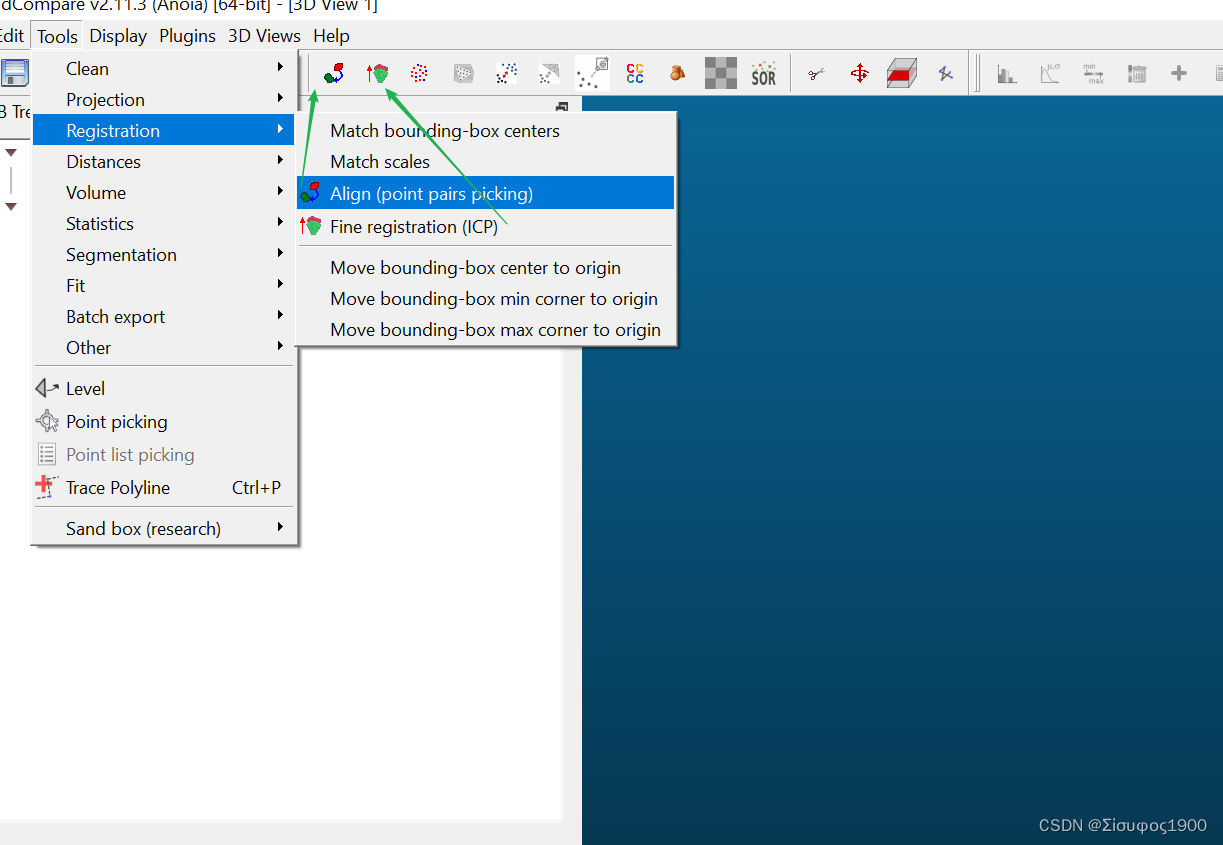
35、点云对齐
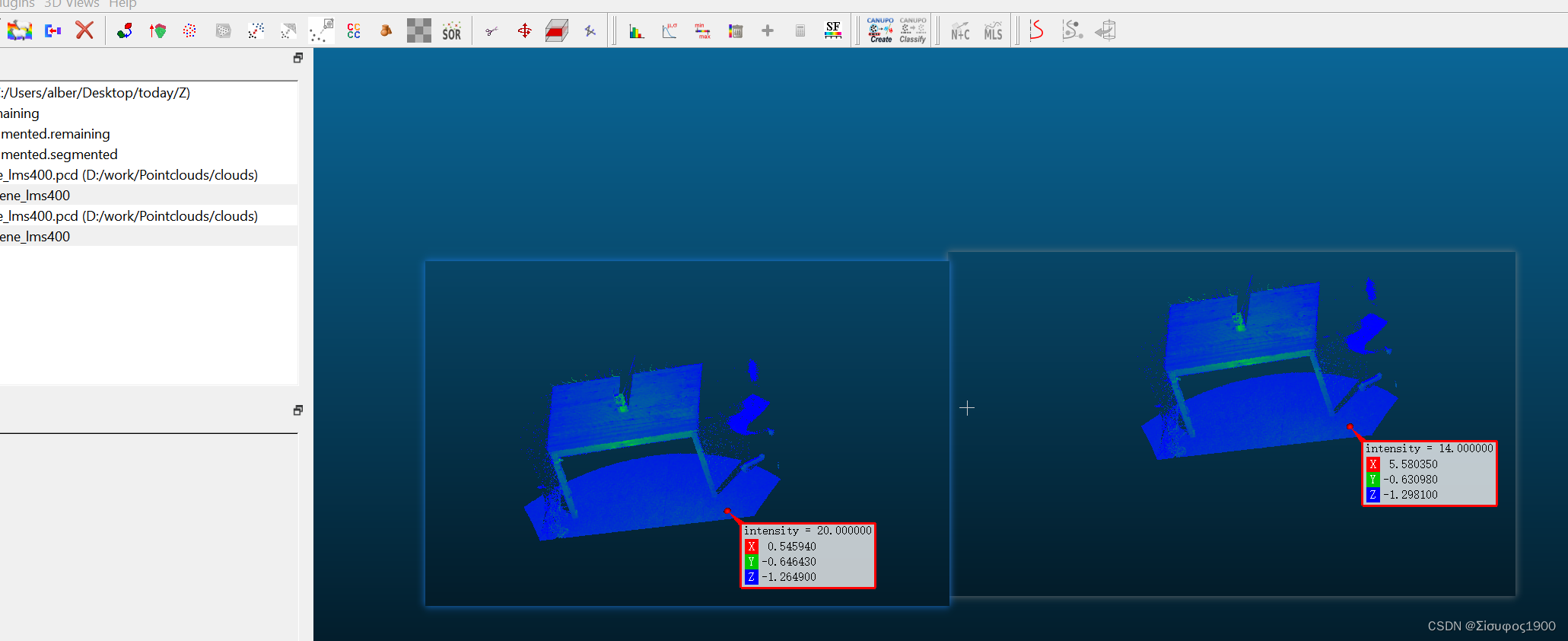
原始的两个点云
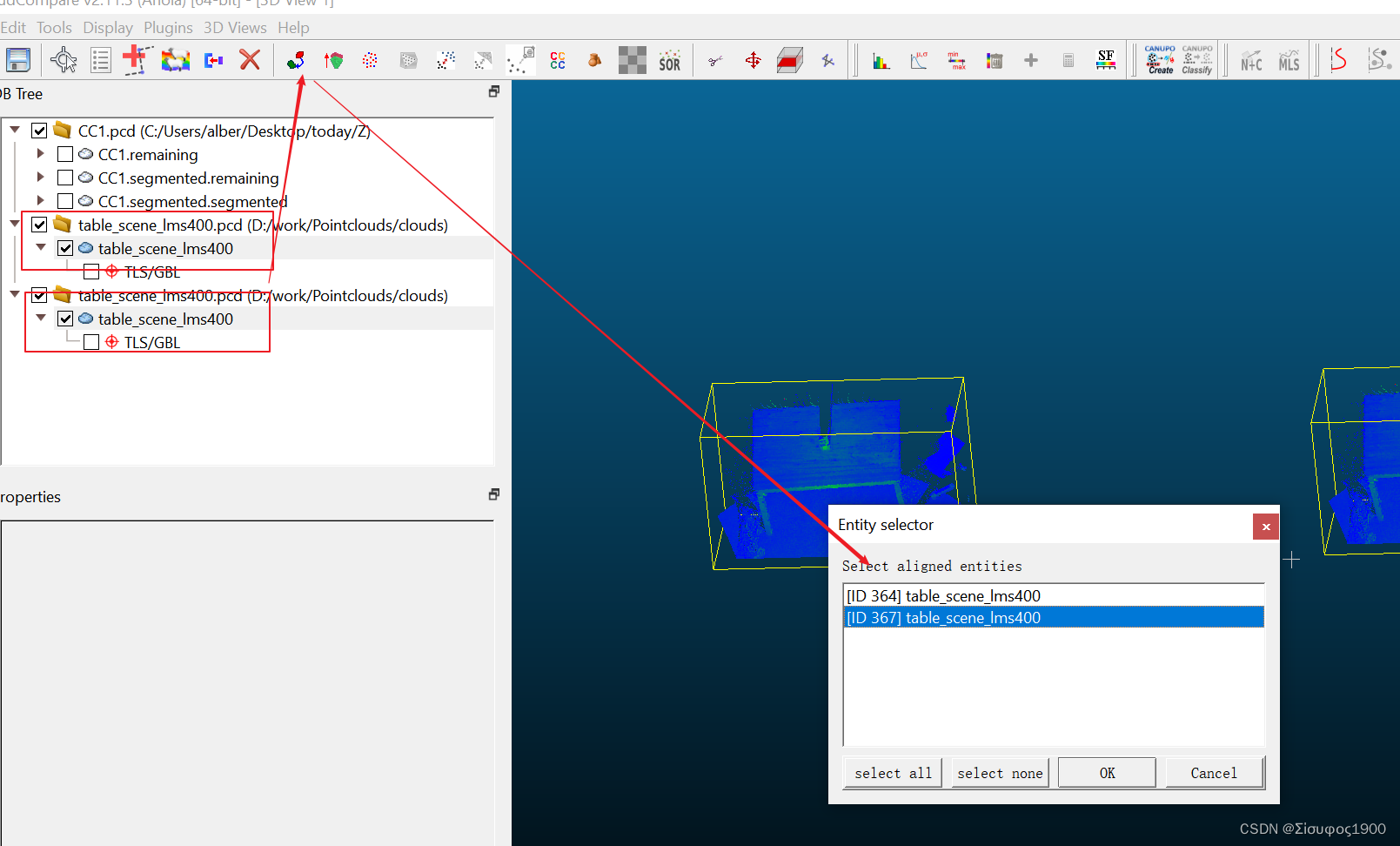
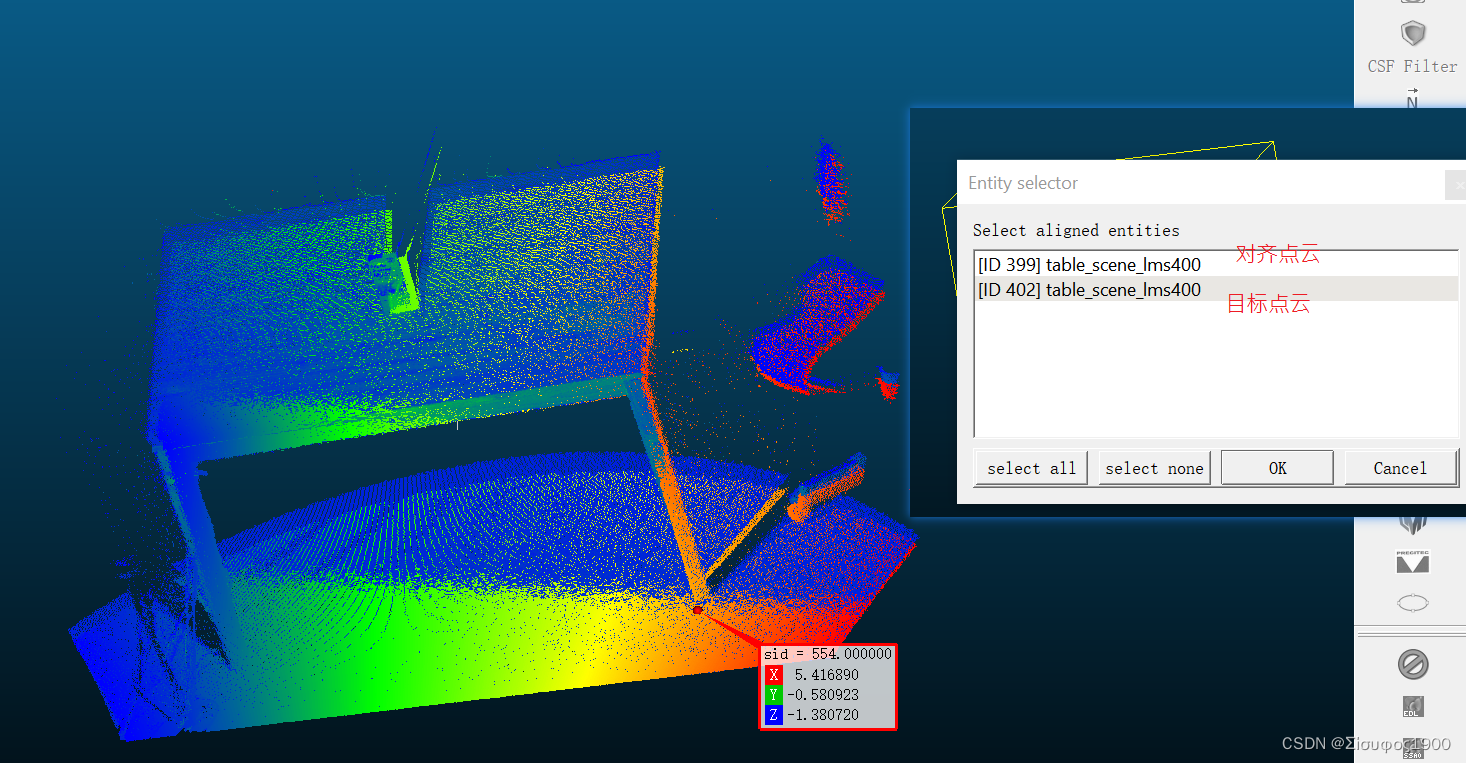
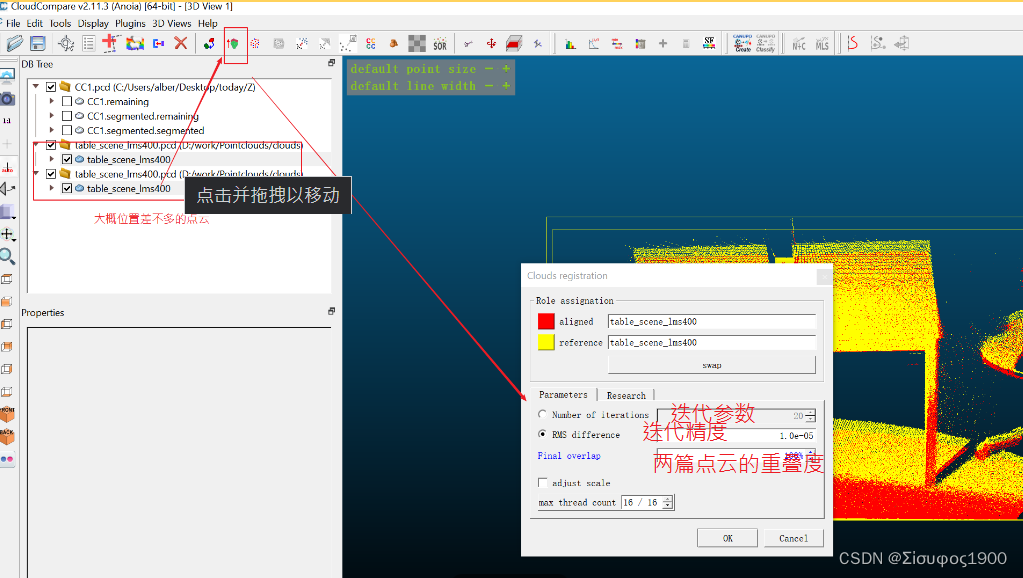
开始对齐:
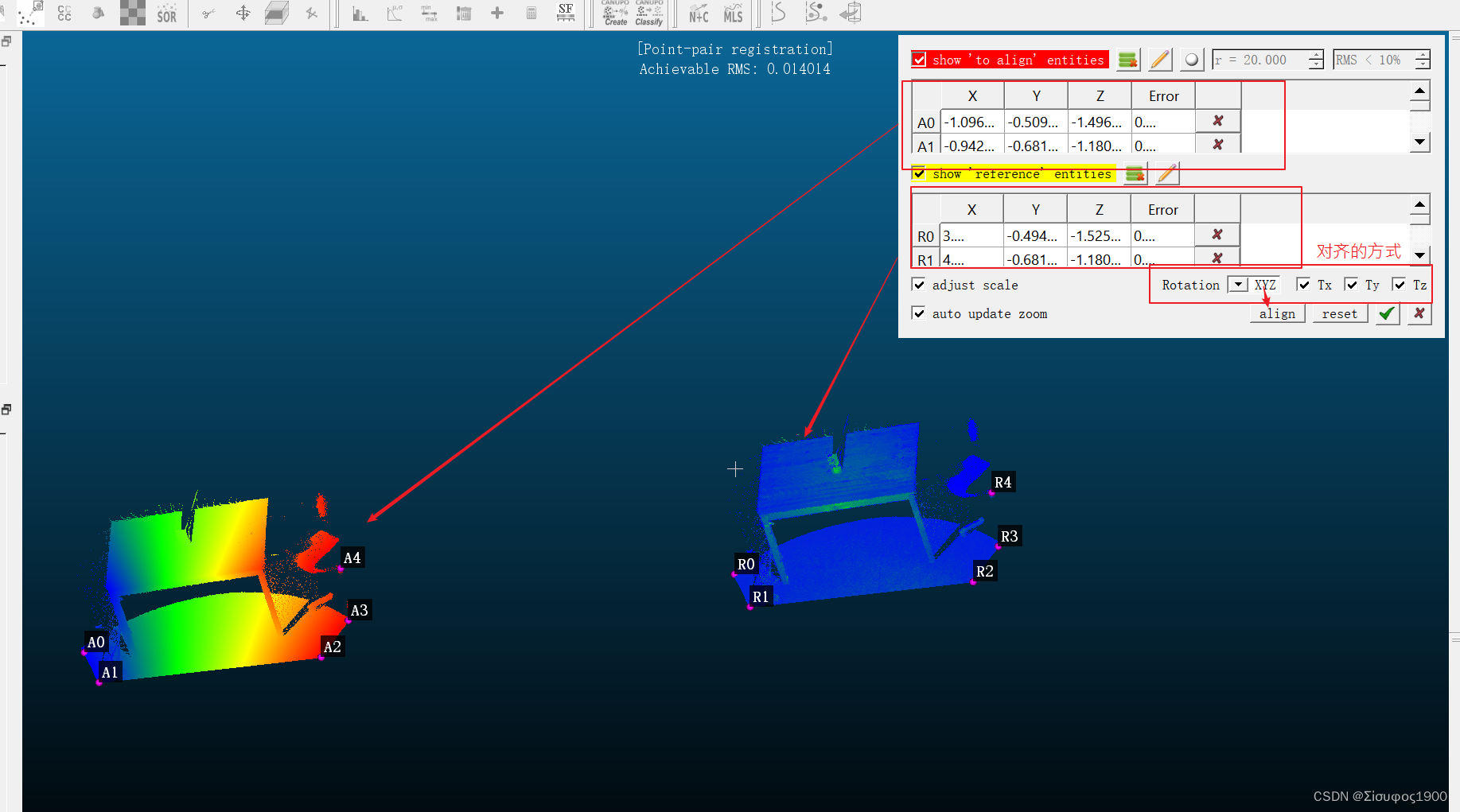
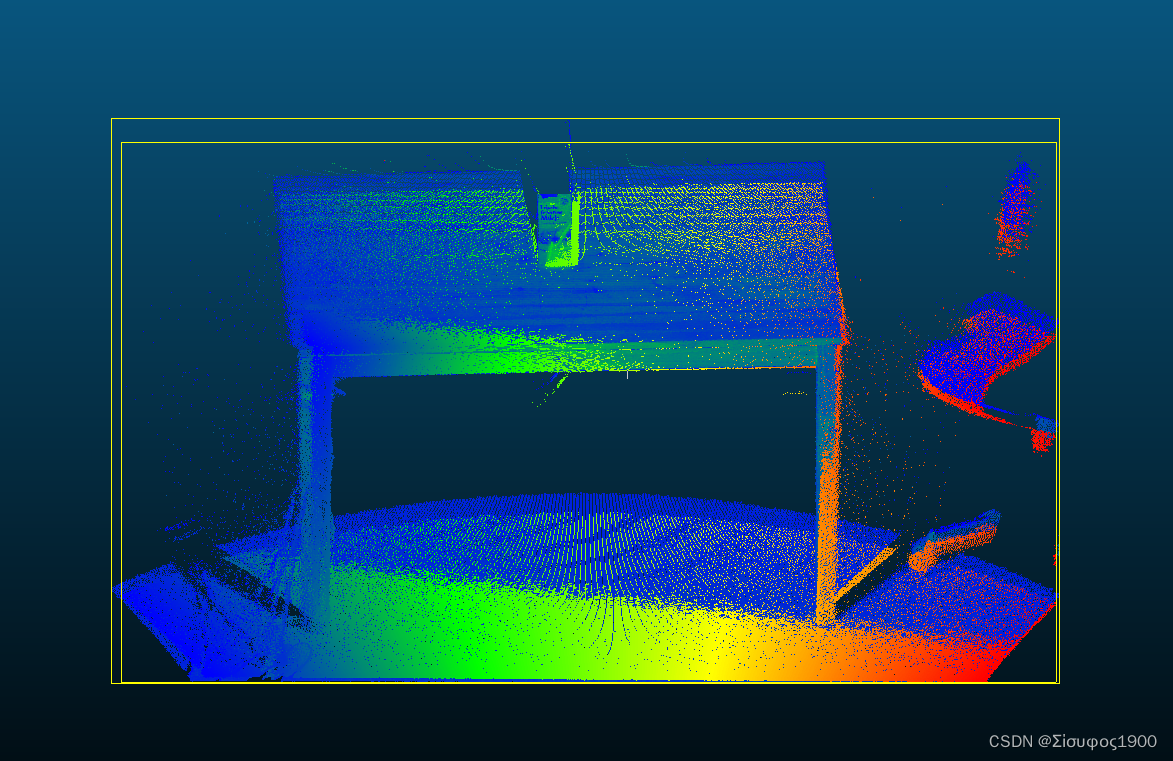
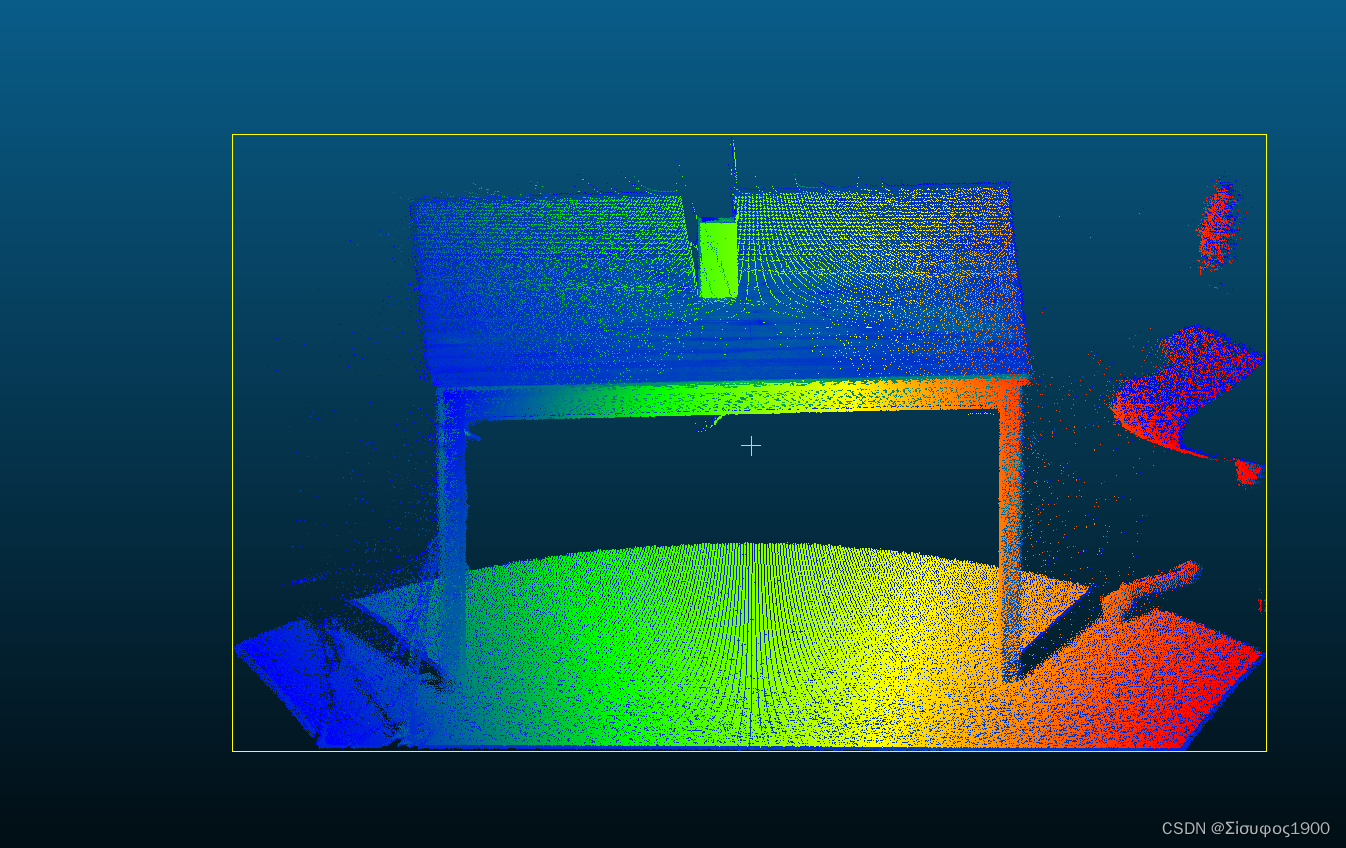
对齐后的效果: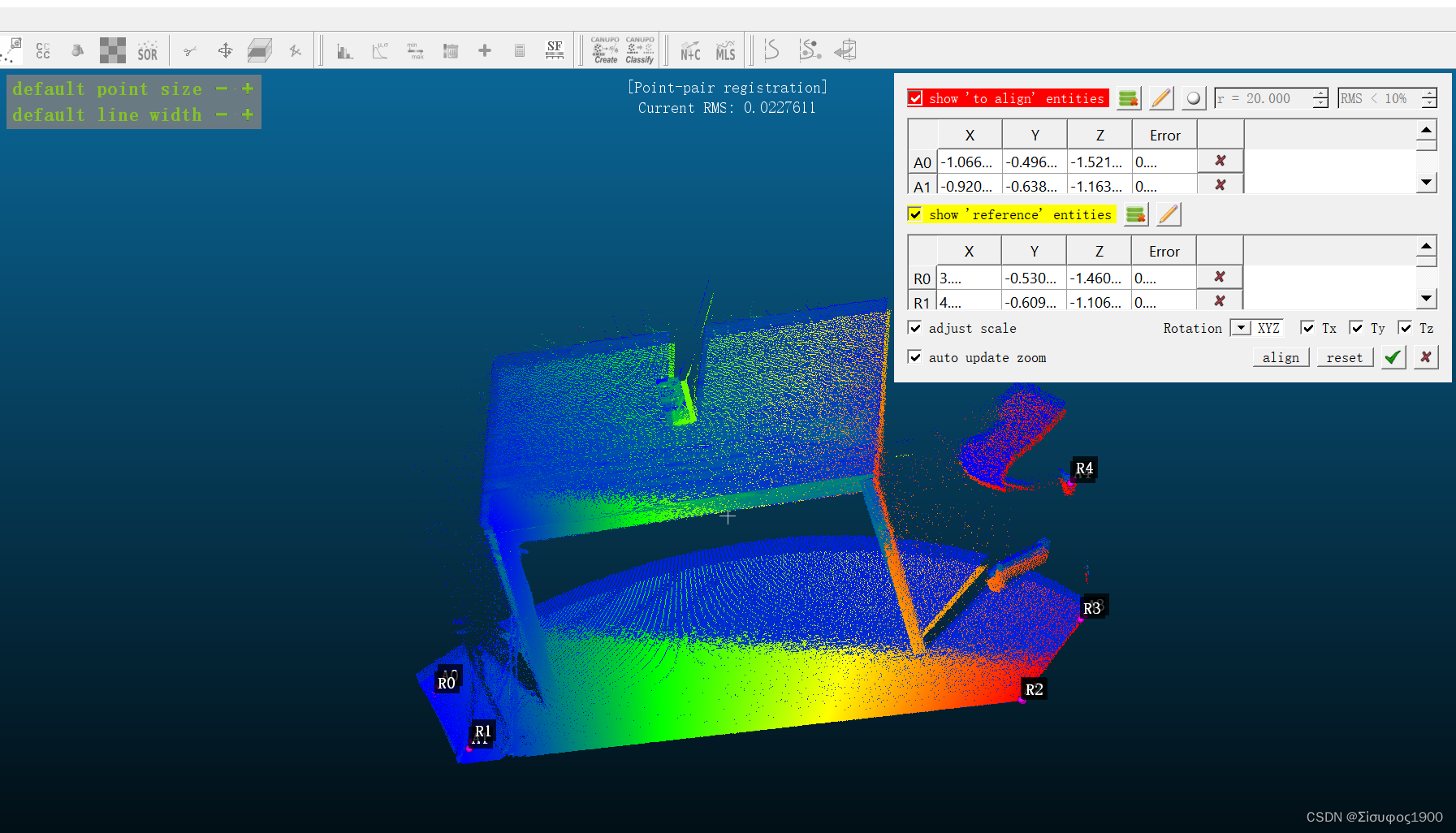
变换矩阵:
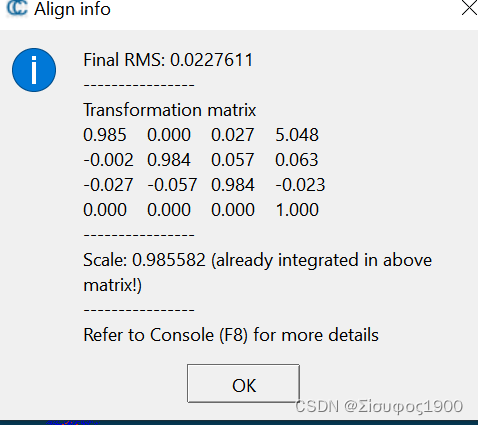
从上面可以看出
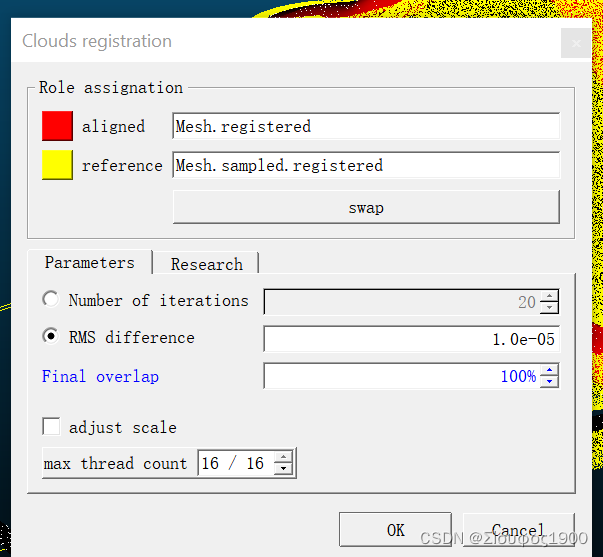
36、精细配准
在35 的基础上进行精细配准。
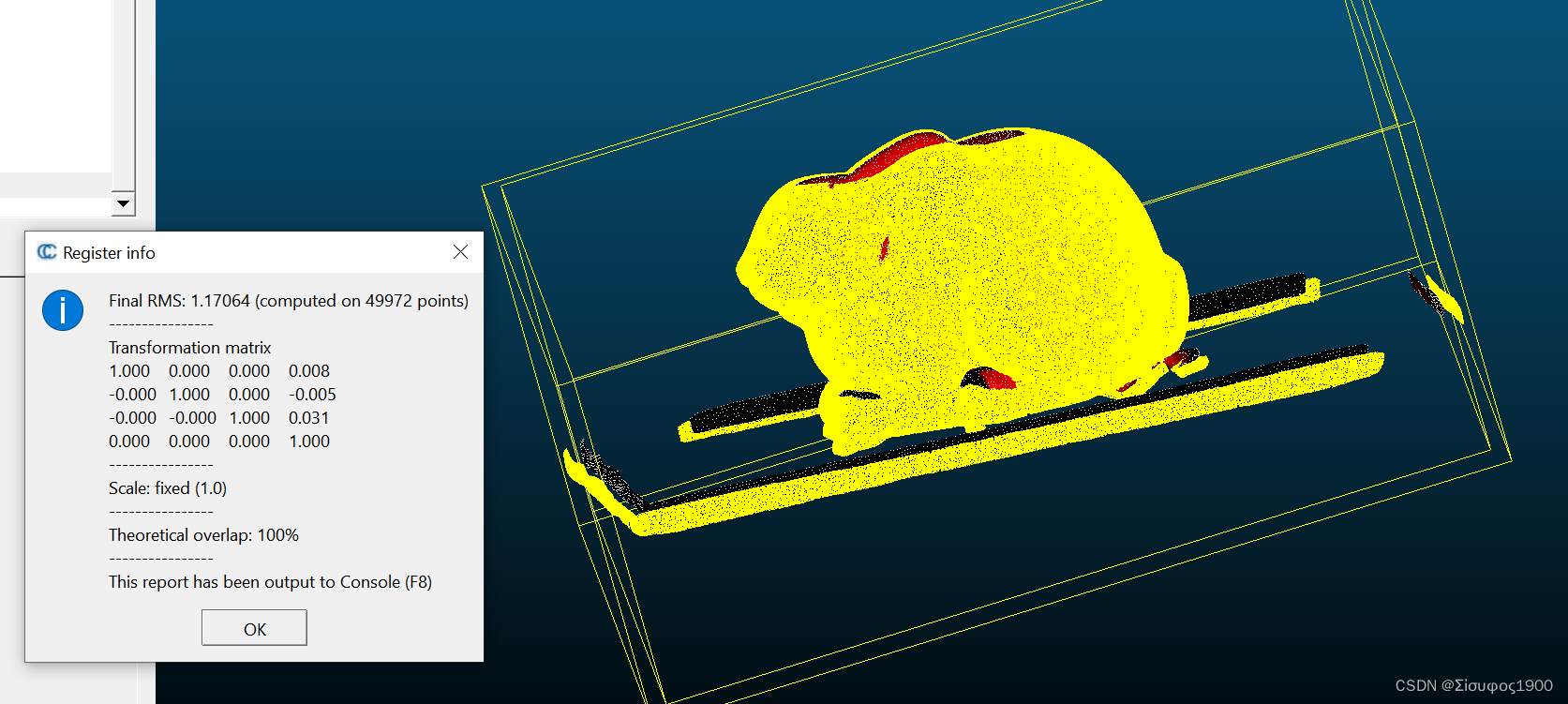
精细配准的矩阵

精细配准后的点云
将两个点云合并
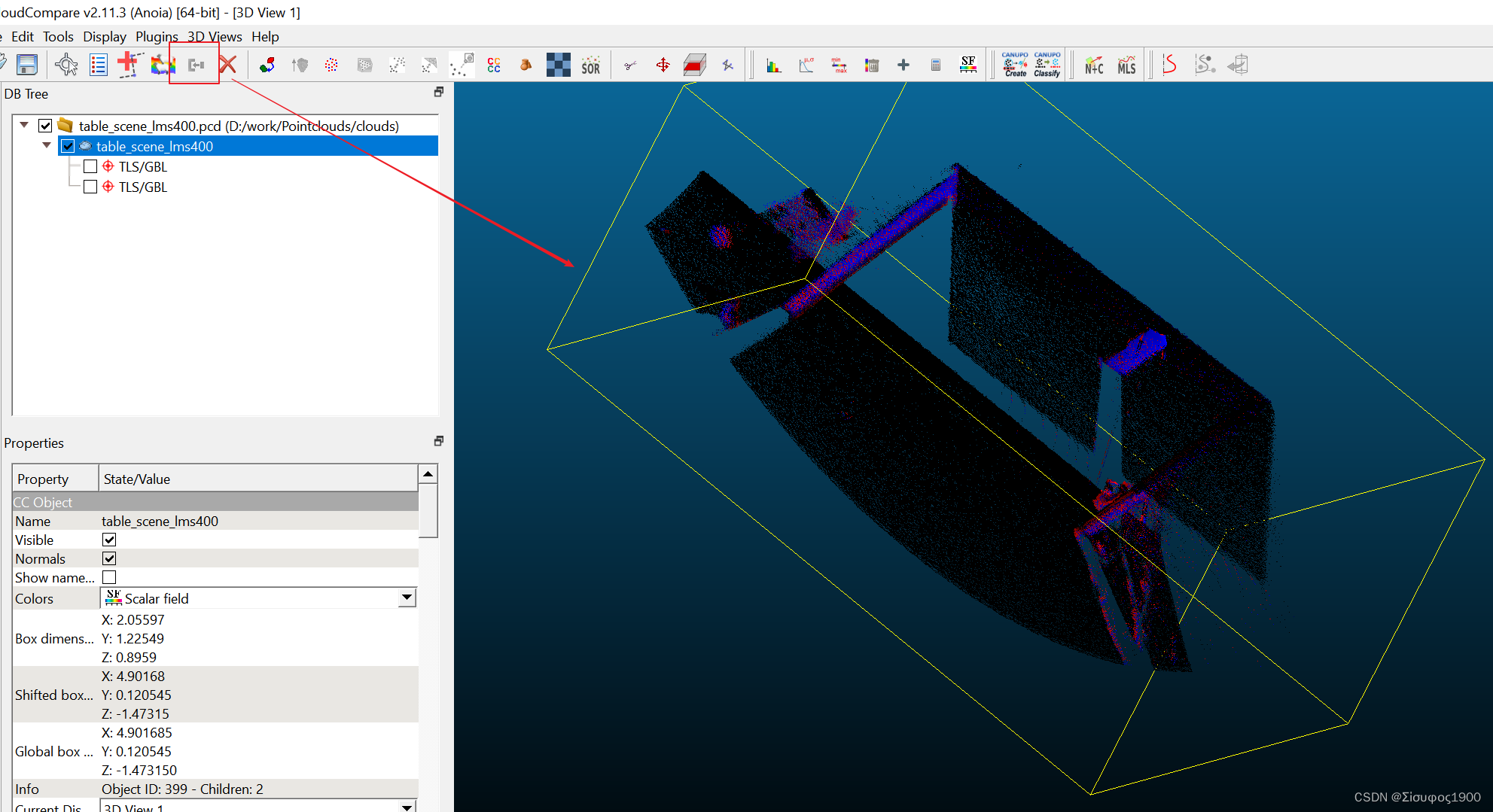
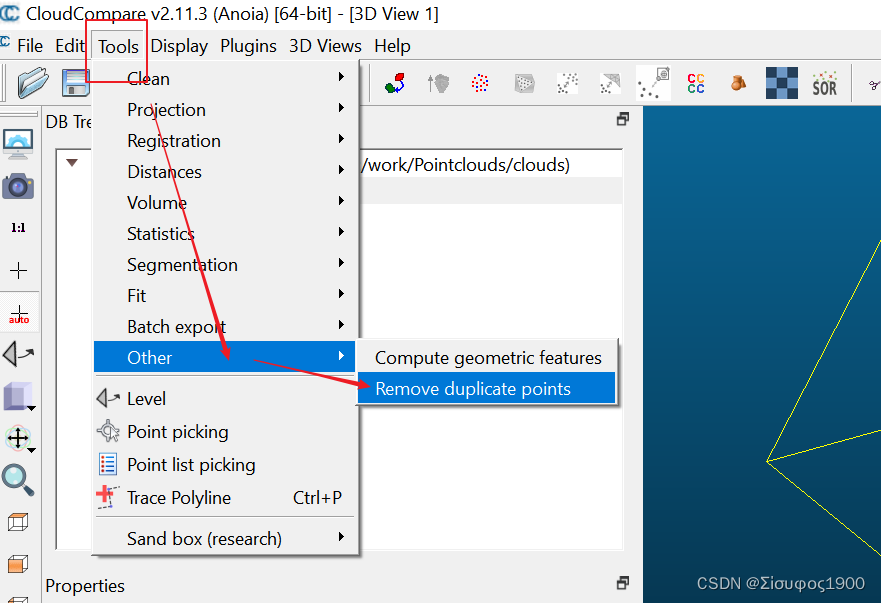
去除重复的点
结果:
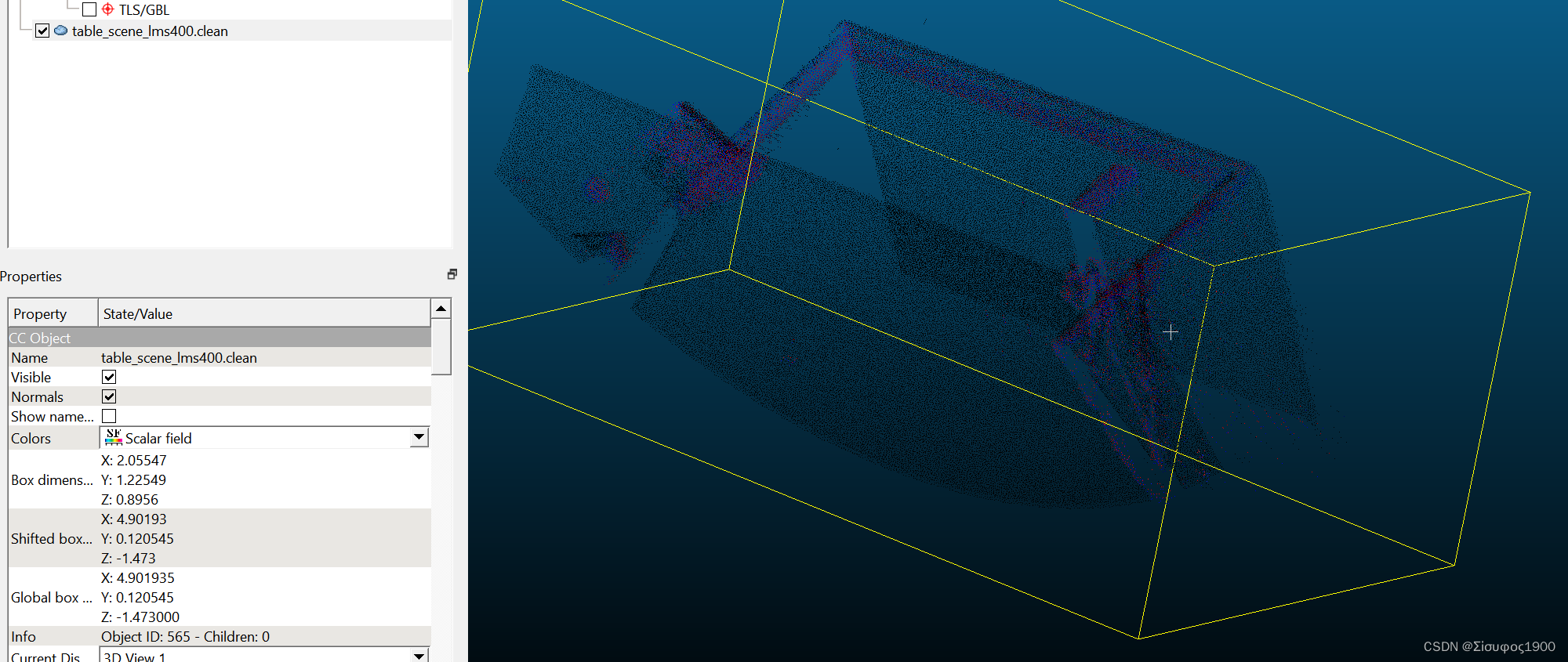
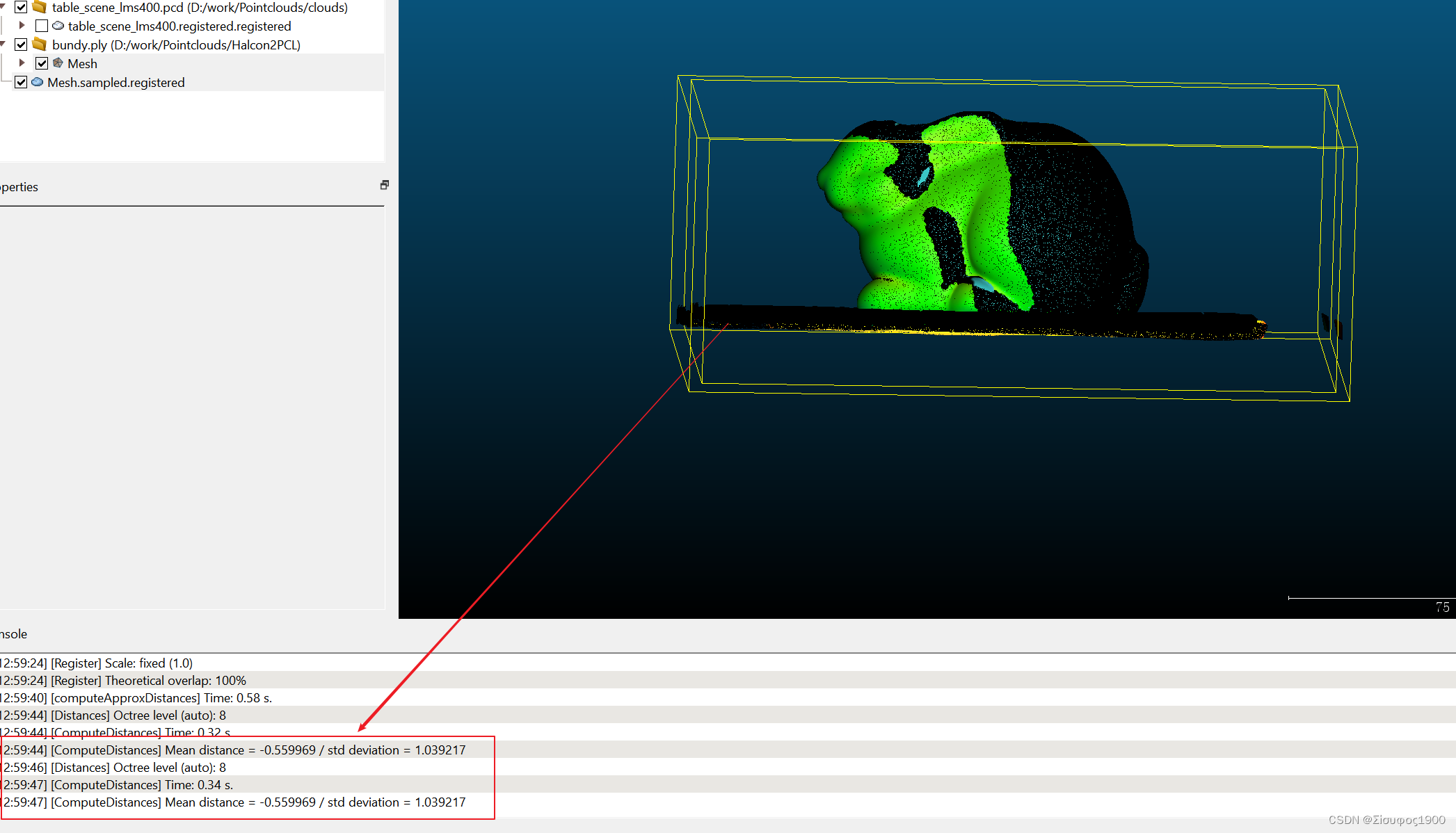
37、点云的比较
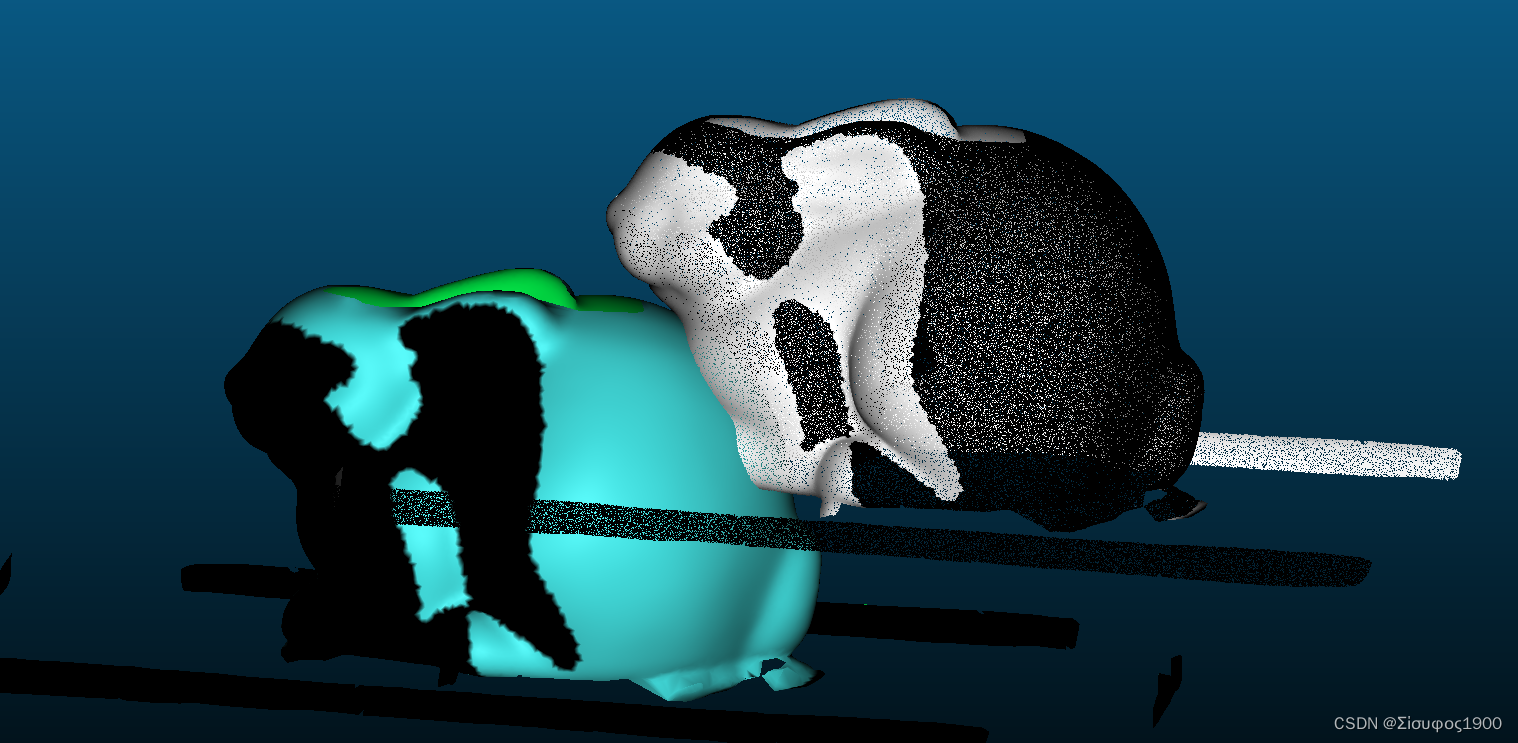
两个点云
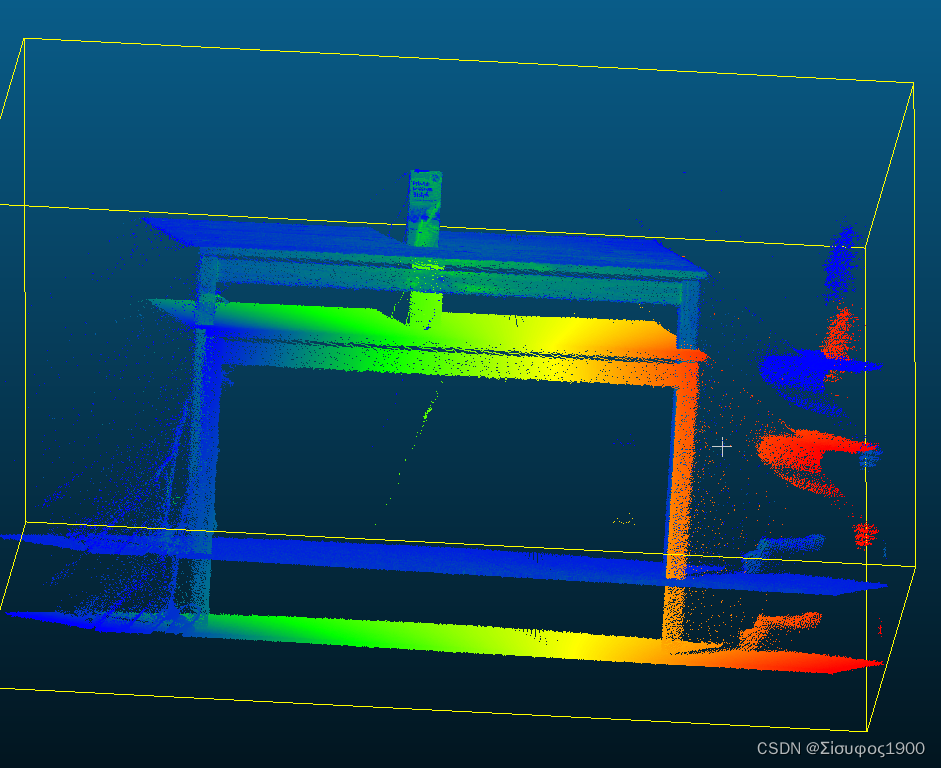
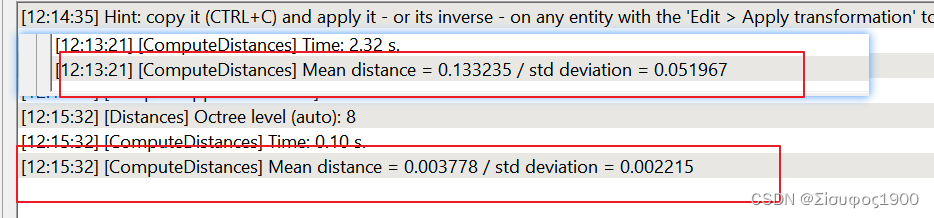
在这个基础上就计算点云的距离:
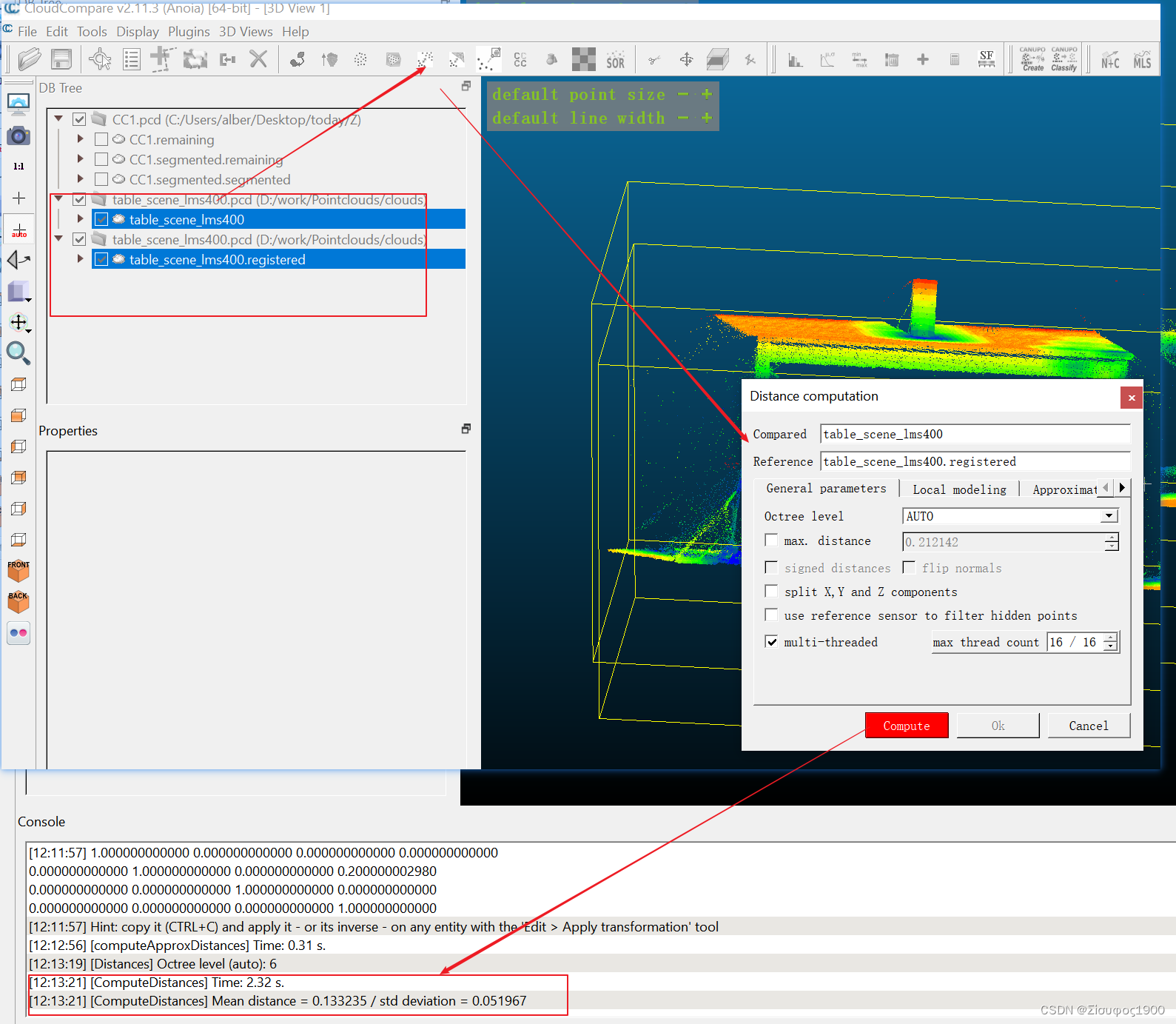
然后对两个点云进行精配准:
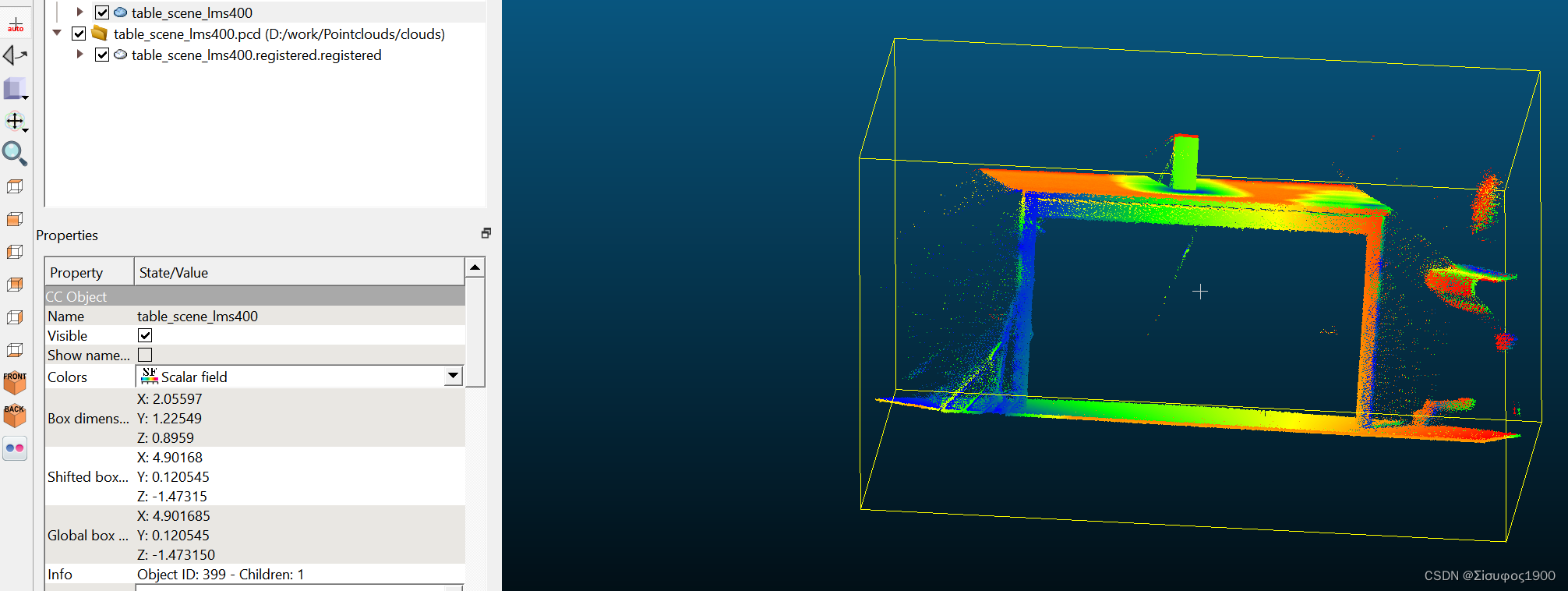
重新计算两个精配准之后的点云的距离
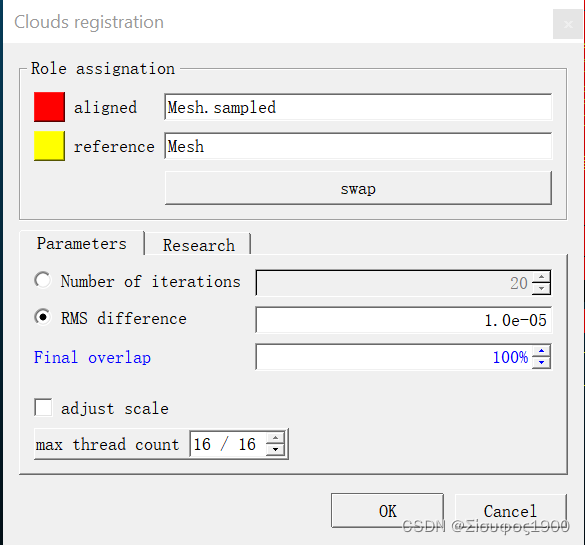
38、点云和网格的对齐
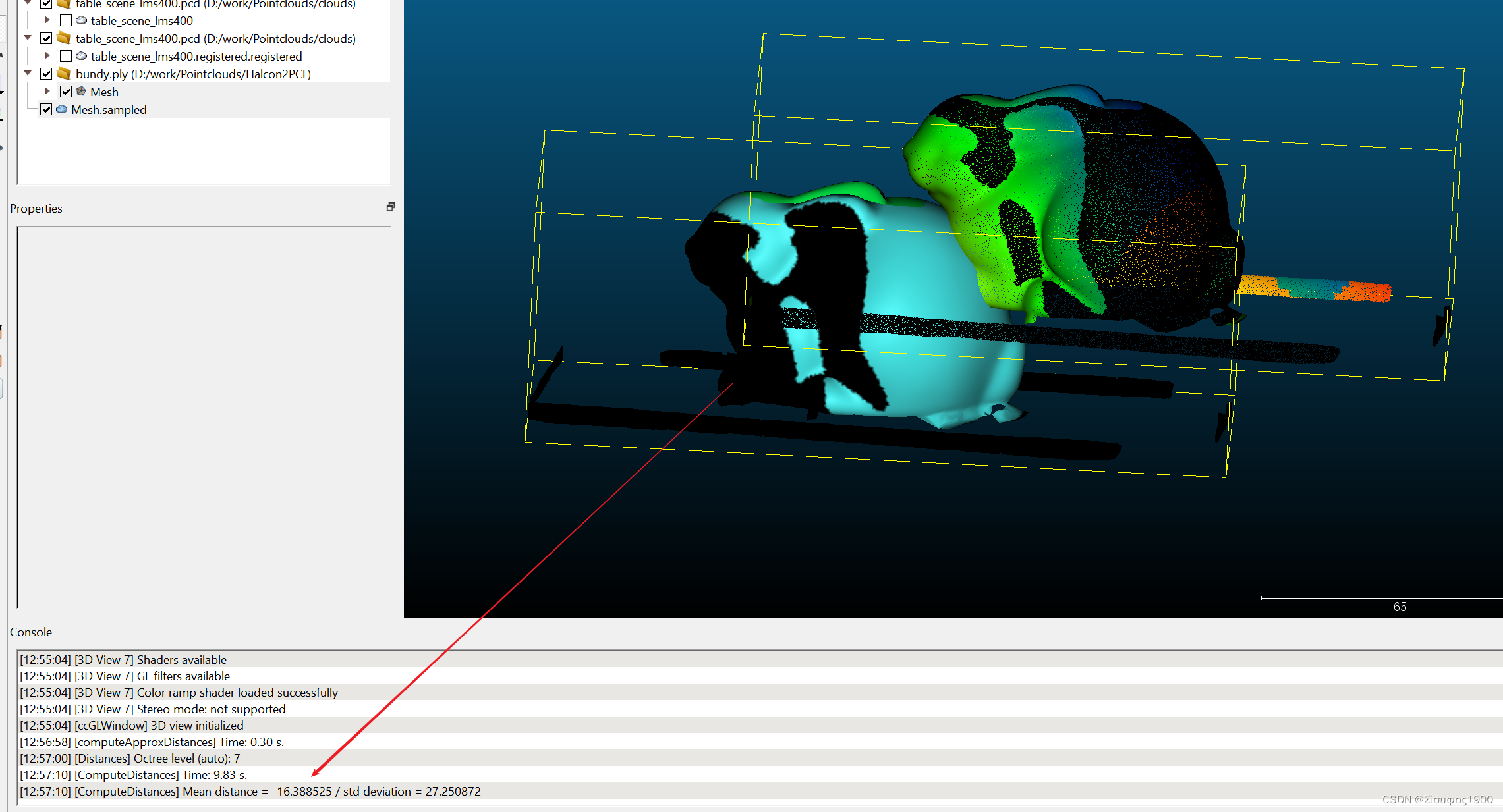
mesh 和点云
求位置
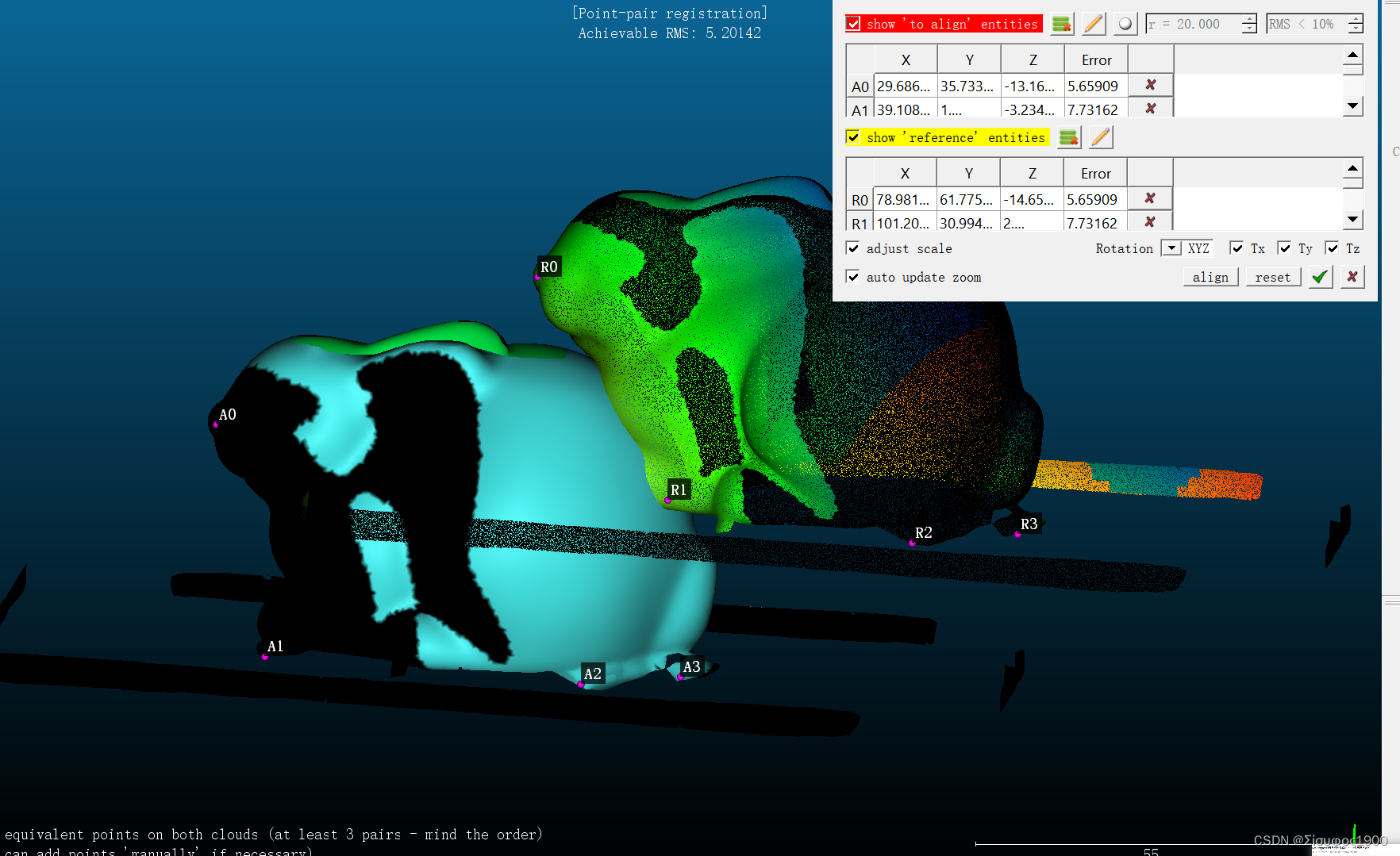
对齐:
精配准
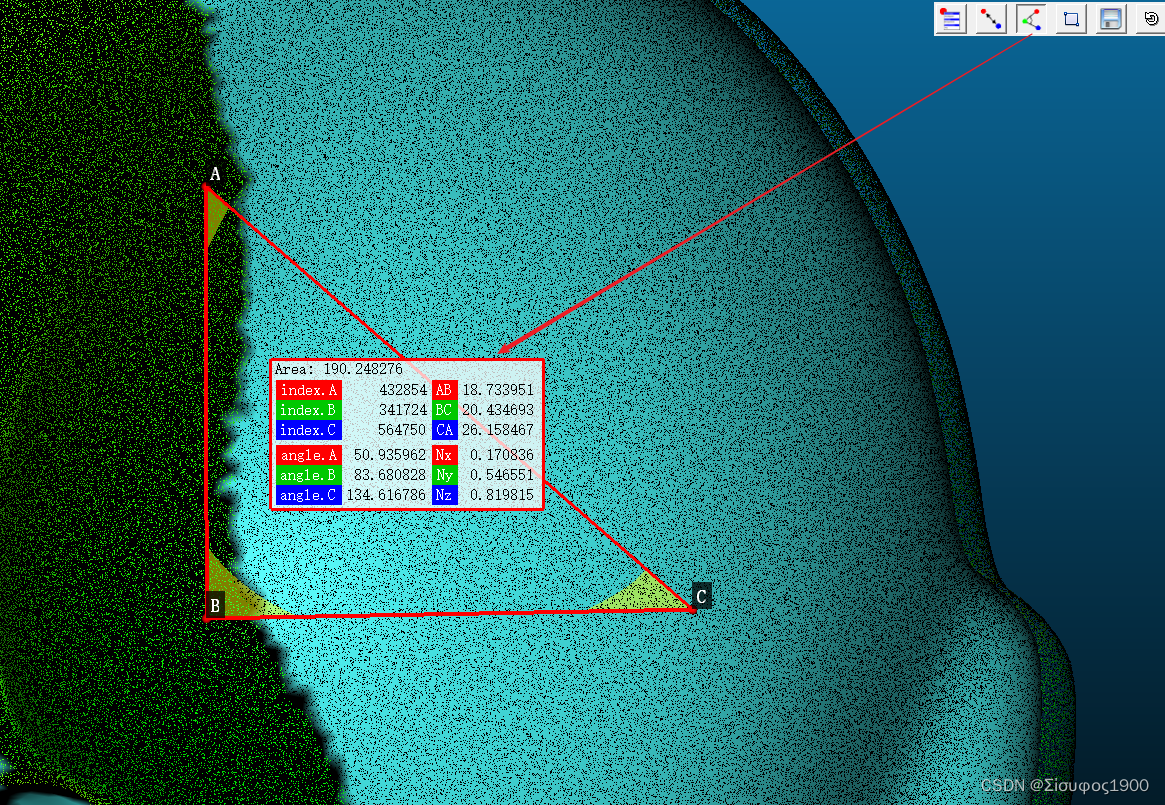
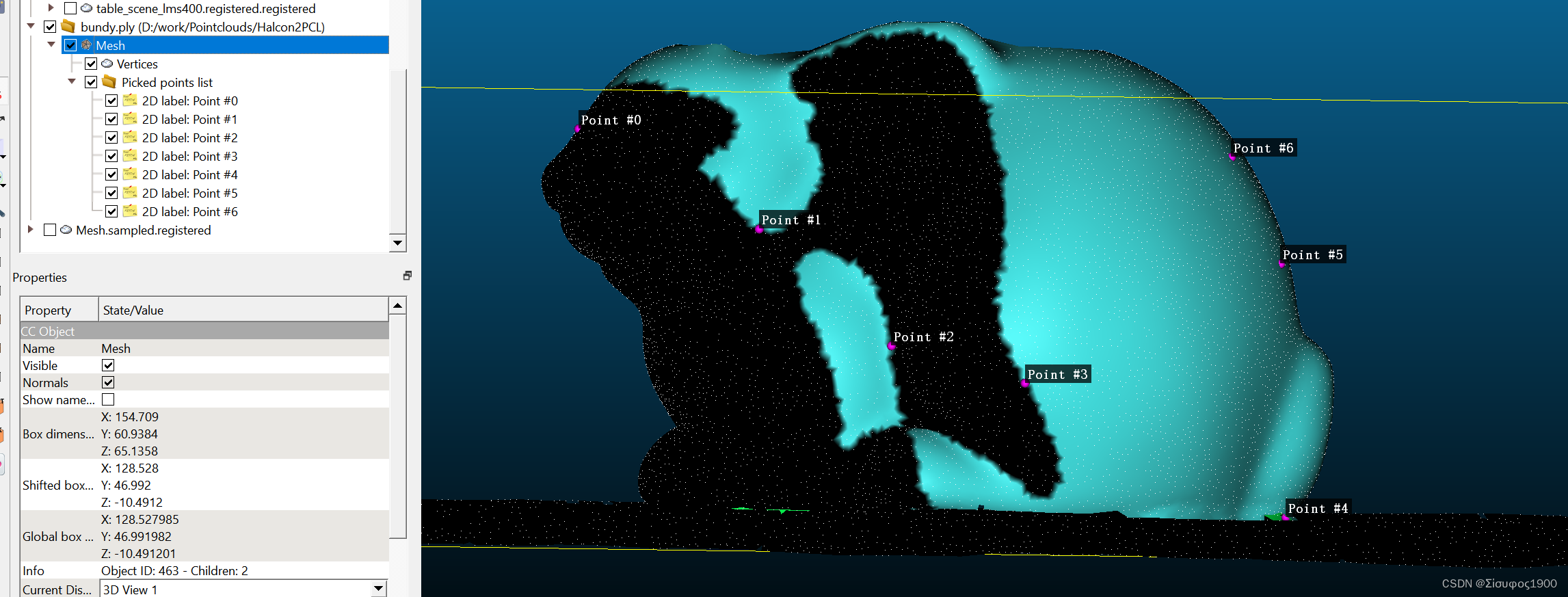
39、点云网格的点测量 角度距离等
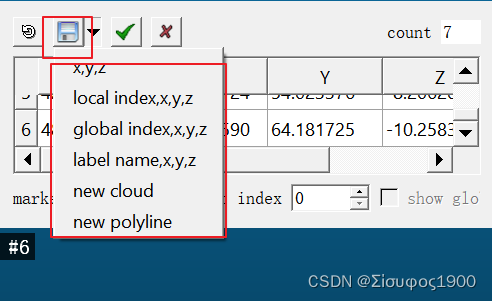
40、测量多个点
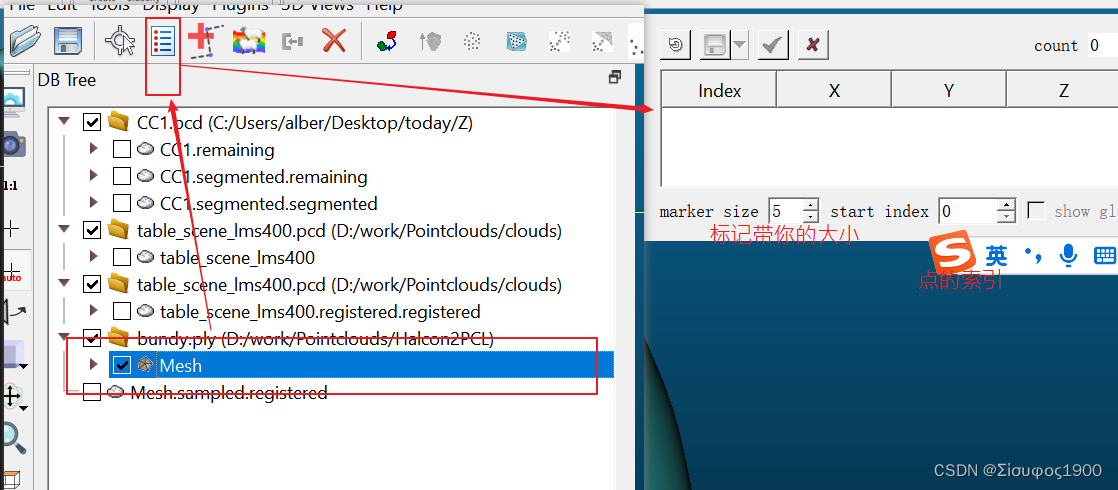
保存点的模式
41、 自由移动进行快速对齐
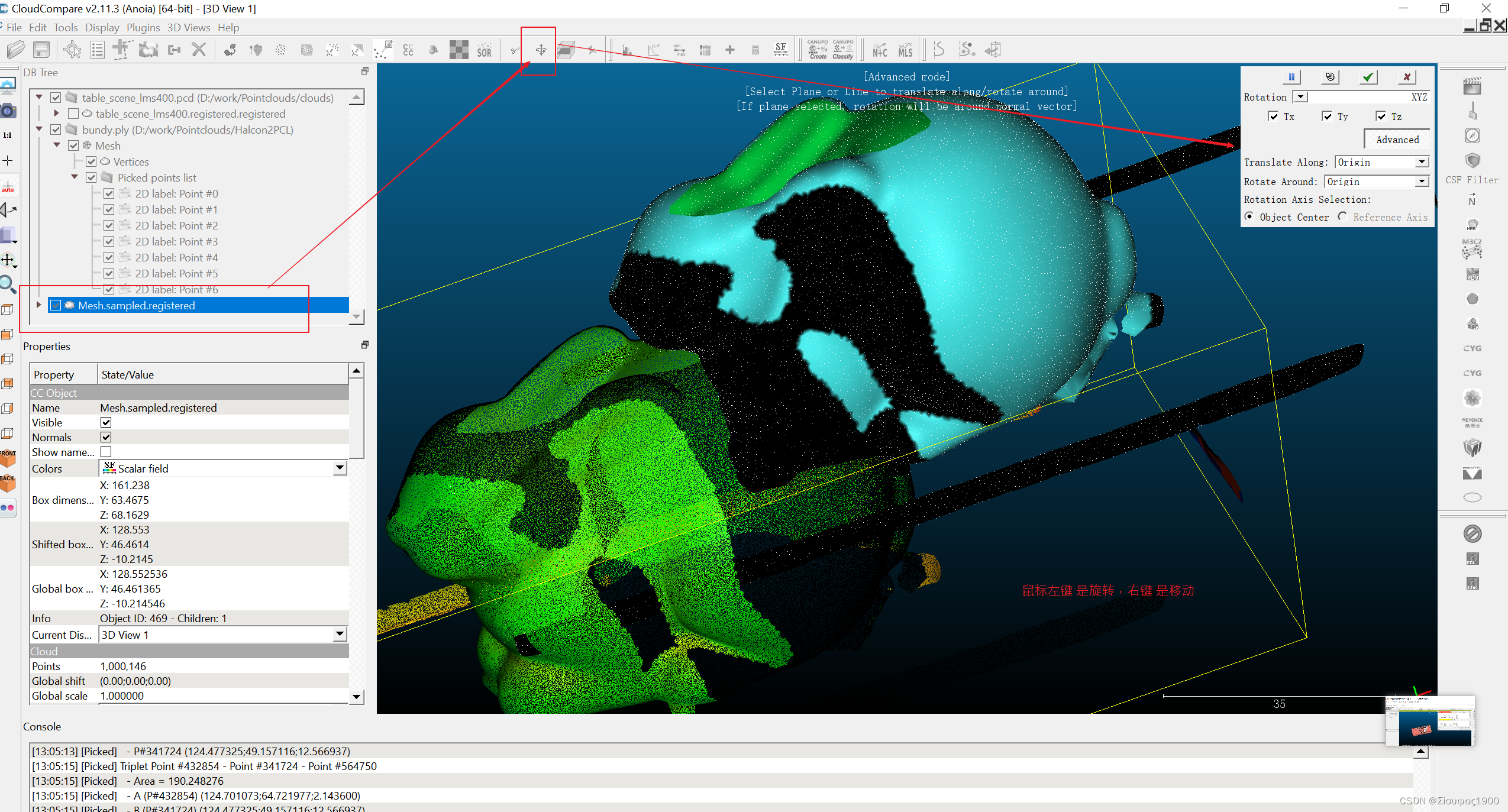
快速自由移动后的结果
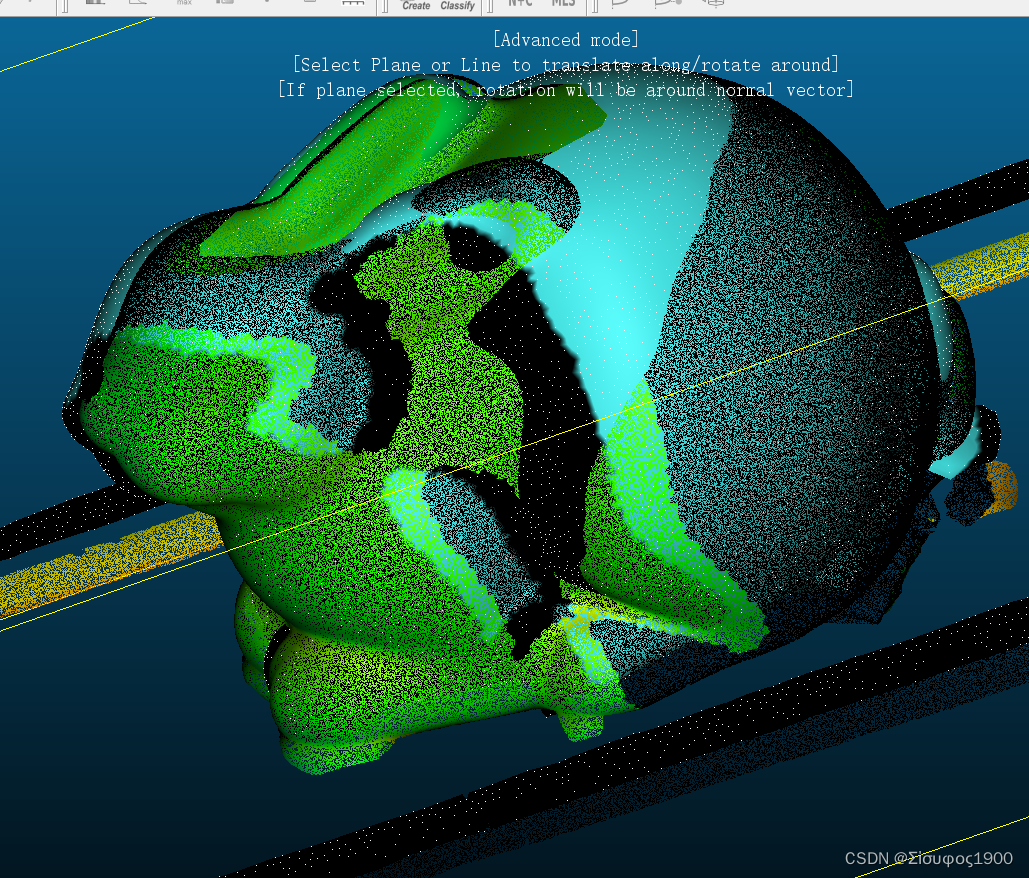 然后进行精匹配
然后进行精匹配
结果
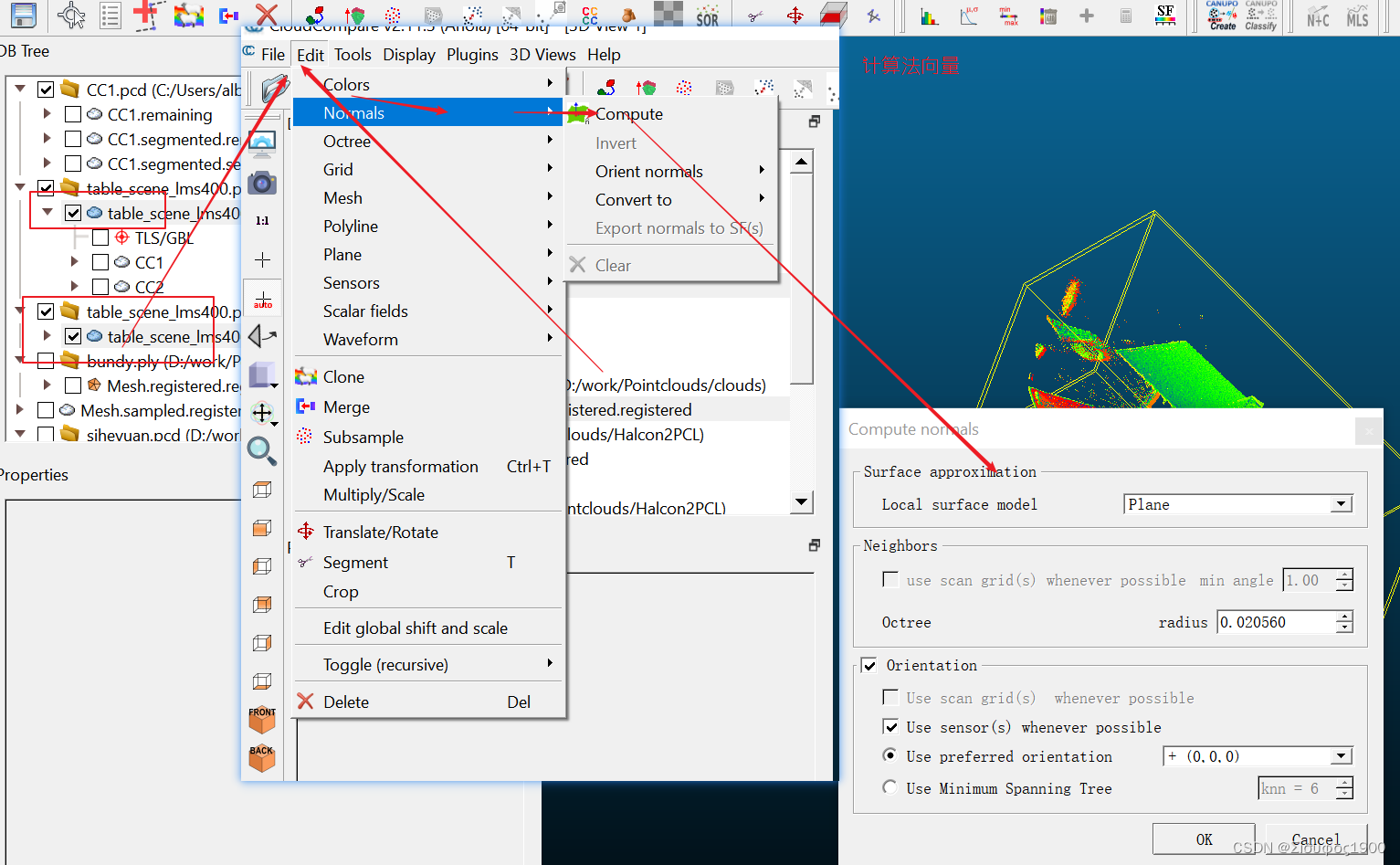
42、点云的快速匹配
计算点云的法向量


















 2352
2352

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









