







7. Gazebo 仿真器
7.1 Gazebo仿真器 1

模块1里包括了上面的的这些内容
- 主流的机器人仿真软件:gazebo,v-rep, webots。
- gazebo: 用于仿真三维刚体动力学的软件。包含噪声的多种传感器,三维可视化和用户交互,具备大量机器人和环境模型数据库,提供ROS2 接口,使用插件的方式进行扩展。
7.2 Gazebo仿真器 2
- 右上角的create plot按钮可以打开gazebo的曲线绘制窗口

- 选 models,可以看到目前 环境中的模型,选取模型的参数,在右侧图中就可以看到实时的参数变化曲线

- 查看ROS系统中的视像头数据流
rqt_image_view
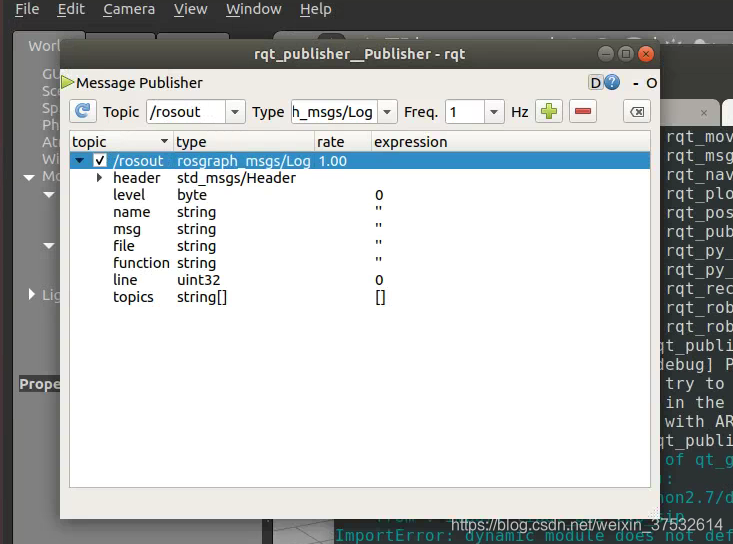
- 通过rqt进行手动消息广播
roscore
rosrun rqt_publisher rqt_publisher

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









