



出错信息:
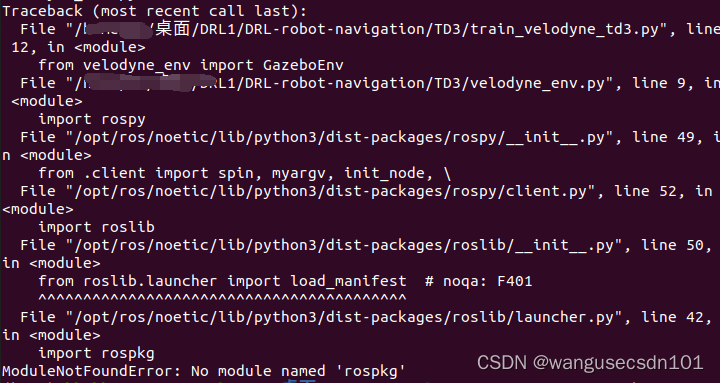 解决方法:安装rospy包
解决方法:安装rospy包
由于我的Ubuntu版本使20.04,所以可以使用以下命令安装:
pip3 install rospy
 本文介绍了解决Ubuntu20.04系统中遇到的与rospy包相关错误的步骤,提供使用pip3进行安装的解决方案。
解决方法:安装rospy包
本文介绍了解决Ubuntu20.04系统中遇到的与rospy包相关错误的步骤,提供使用pip3进行安装的解决方案。
解决方法:安装rospy包
pip3 install rospy

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





















 1903
1903





