<think>首先,用户的问题是:“我想了解3D到2D透视n点问题中DLT方法的原理和应用 请问3D-2D PnP问题中的DLT算法原理及实现方法”。这直接针对DLT(直接线性变换)在PnP问题中的应用。
系统指令要求:
- 所有行内数学表达式用$...$格式。
- 独立公式用$$...$$格式并单独成段。
- LaTeX语法正确。
- 使用中文回答。
- 生成相关问题。
- 在回答中引用的段落末尾自然地添加引用标识,例如[^1]。
- 回答结构清晰,帮助用户逐步解决问题。
- 参考提供的引用内容。
提供的引用内容:
- 引用[1]: 提到3D-2D方法不需要对极约束,在少匹配点中效果好,包括PnP、P3P、DLT、EPnP等。
- 引用[2]: 学习笔记,提到PnP方法如P3P、DLT、EPnP、UPnP、Bundle Adjustment。
- 引用[3]: 视觉SLAM入门,详细描述PnP方法,包括DLT、P3P、BA优化。
- 引用[4]: 视觉SLAM笔记,解释PnP如何转换为ICP问题。
用户的问题焦点是DLT方法在PnP问题中的原理和实现。
结构化回答:
1. **介绍PnP问题和DLT方法**:简要解释什么是PnP问题(Perspective-n-Point),即从3D点到2D点的对应估计相机姿态(位置和方向)。
2. **DLT原理**:解释直接线性变换(DLT)的基本思想。DLT是一种线性方法,用于求解相机投影矩阵。
3. **数学推导**:展示DLT的数学公式。使用独立公式块。
4. **实现步骤**:描述DLT算法的实现步骤。
5. **应用和优缺点**:讨论DLT在SLAM、计算机视觉中的应用,以及其优缺点。
6. **生成相关问题**:在末尾添加相关问题。
关键数学公式:
- 相机投影模型:一个3D点$P_w = (X, Y, Z, 1)^T$在齐次坐标中,投影到2D点$p = (u, v, 1)^T$。
- 投影方程:$s p = K [R | t] P_w$,其中$K$是相机内参矩阵,$[R | t]$是外参矩阵。
- DLT假设内参已知或未知。在PnP中,通常假设内参已知,但DLT可以处理未知内参。
- 对于每个点对应:$s \begin{bmatrix} u \\ v \\ 1 \end{bmatrix} = \begin{bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} r_{11} & r_{12} & r_{13} & t_x \\ r_{21} & r_{22} & r_{23} & t_y \\ r_{31} & r_{32} & r_{33} & t_z \end{bmatrix} \begin{bmatrix} X \\ Y \\ Z \\ 1 \end{bmatrix}$。
- 简化:假设内参已知,DLT求解外参。或者,如果内参未知,求解整个投影矩阵。
- 在PnP中,通常内参已知,所以DLT求解$[R | t]$。
- 线性化:从投影方程推导出线性方程。
- 对于每个点:$u = \frac{P_{11}X + P_{12}Y + P_{13}Z + P_{14}}{P_{31}X + P_{32}Y + P_{33}Z + P_{34}}$, $v = \frac{P_{21}X + P_{22}Y + P_{23}Z + P_{24}}{P_{31}X + P_{32}Y + P_{33}Z + P_{34}}$,其中$P$是投影矩阵。
- 重写为:$u (P_{31}X + P_{32}Y + P_{33}Z + P_{34}) = P_{11}X + P_{12}Y + P_{13}Z + P_{14}$
$v (P_{31}X + P_{32}Y + P_{33}Z + P_{34}) = P_{21}X + P_{22}Y + P_{23}Z + P_{24}$
- 这给出两个方程:$X P_{11} + Y P_{12} + Z P_{13} + P_{14} - u X P_{31} - u Y P_{32} - u Z P_{33} - u P_{34} = 0$
$X P_{21} + Y P_{22} + Z P_{23} + P_{24} - v X P_{31} - v Y P_{32} - v Z P_{33} - v P_{34} = 0$
- 写成矩阵形式:$A x = 0$,其中$x$是投影矩阵元素向量。
- 最小二乘解:SVD分解。
在回答中,使用中文,并正确格式化数学表达式。
参考引用:在适当的地方添加引用标识。例如,当提到PnP方法时,引用[^1]或[^2]。
实现方法:描述DLT算法的步骤,可能包括伪代码或描述性步骤。
相关问题:在末尾生成相关问题,如“§§相关问题§§”。
回答结构:
- 引言:什么是PnP问题和DLT方法。
- DLT原理:详细解释数学推导。
- 实现:如何实现DLT算法。
- 应用:在SLAM等领域的应用。
- 优缺点:讨论。
- 相关问题。
确保回答真实可靠:基于标准计算机视觉知识。</think>### 3D-2D PnP问题中的DLT算法原理及实现方法
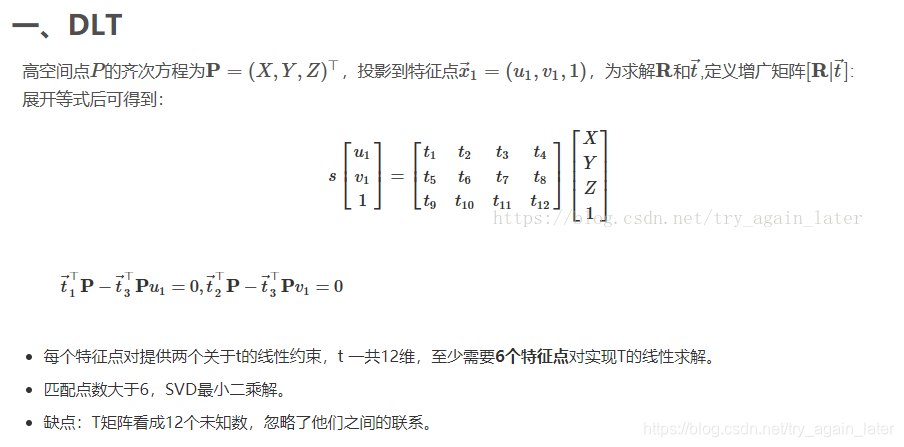
在计算机视觉和SLAM(Simultaneous Localization and Mapping)中,3D-2D透视n点(PnP)问题旨在通过一组已知的3D点及其对应的2D图像点,估计相机的姿态(即旋转矩阵 $R$ 和平移向量 $t$)。DLT(直接线性变换)是一种经典的线性求解方法,它通过构建线性方程组直接求解相机投影矩阵,不需要迭代过程,适用于点对应数量较多(至少6个点)的场景。DLT方法在效率上较高,但对噪声敏感,且求解结果需进一步优化以满足旋转矩阵的正交约束[^1][^2]。下面我将逐步解释DLT的原理、实现方法及其应用。
#### 1. **PnP问题与DLT方法概述**
PnP问题定义为:给定 $n$ 个3D点 $\{P_i = (X_i, Y_i, Z_i, 1)^T\}$(齐次坐标)及其对应的2D投影点 $\{p_i = (u_i, v_i, 1)^T\}$(齐次坐标),求解相机的外参矩阵 $[R | t]$ 和内参矩阵 $K$(如果未知)。在标准PnP中,相机内参通常假设已知,但DLT可以处理内参未知的情况。DLT的核心思想是将非线性投影方程线性化为一个齐次线性系统 $A x = 0$,然后通过SVD分解求解[^2][^3]。DLT的优势在于实现简单、计算快速,但缺点是解可能不满足旋转矩阵的约束(如正交性),需后续处理[^1]。
#### 2. **DLT算法的数学原理**
相机投影模型描述为:
$$ s p = K [R | t] P $$
其中:
- $s$ 是尺度因子,
- $K$ 是内参矩阵($K = \begin{bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix}$),
- $[R | t]$ 是外参矩阵($R$ 为旋转矩阵,$t$ 为平移向量),
- $P$ 是3D点齐次坐标,$p$ 是2D点齐次坐标。
DLT方法假设内参 $K$ 已知(或未知,但这里以已知为例)。投影方程可写为:
$$ s \begin{bmatrix} u \\ v \\ 1 \end{bmatrix} = K [R | t] \begin{bmatrix} X \\ Y \\ Z \\ 1 \end{bmatrix} $$
令 $P_{\text{proj}} = K [R | t]$ 为投影矩阵($3 \times 4$ 矩阵),则:
$$ s p = P_{\text{proj}} P $$
展开后,对于每个点 $i$,有:
$$ u_i = \frac{P_{11} X_i + P_{12} Y_i + P_{13} Z_i + P_{14}}{P_{31} X_i + P_{32} Y_i + P_{33} Z_i + P_{34}}, \quad v_i = \frac{P_{21} X_i + P_{22} Y_i + P_{23} Z_i + P_{24}}{P_{31} X_i + P_{32} Y_i + P_{33} Z_i + P_{34}} $$
其中 $P_{mn}$ 是 $P_{\text{proj}}$ 的元素。消除尺度因子 $s$,得到两个线性方程:
$$ u_i (P_{31} X_i + P_{32} Y_i + P_{33} Z_i + P_{34}) = P_{11} X_i + P_{12} Y_i + P_{13} Z_i + P_{14} $$
$$ v_i (P_{31} X_i + P_{32} Y_i + P_{33} Z_i + P_{34}) = P_{21} X_i + P_{22} Y_i + P_{23} Z_i + P_{24} $$
重写为齐次形式:
$$ X_i P_{11} + Y_i P_{12} + Z_i P_{13} + P_{14} - u_i X_i P_{31} - u_i Y_i P_{32} - u_i Z_i P_{33} - u_i P_{34} = 0 $$
$$ X_i P_{21} + Y_i P_{22} + Z_i P_{23} + P_{24} - v_i X_i P_{31} - v_i Y_i P_{32} - v_i Z_i P_{33} - v_i P_{34} = 0 $$
对于 $n$ 个点,构建矩阵 $A$($2n \times 12$):
$$ A = \begin{bmatrix}
X_1 & Y_1 & Z_1 & 1 & 0 & 0 & 0 & 0 & -u_1 X_1 & -u_1 Y_1 & -u_1 Z_1 & -u_1 \\
0 & 0 & 0 & 0 & X_1 & Y_1 & Z_1 & 1 & -v_1 X_1 & -v_1 Y_1 & -v_1 Z_1 & -v_1 \\
\vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots \\
X_n & Y_n & Z_n & 1 & 0 & 0 & 0 & 0 & -u_n X_n & -u_n Y_n & -u_n Z_n & -u_n \\
0 & 0 & 0 & 0 & X_n & Y_n & Z_n & 1 & -v_n X_n & -v_n Y_n & -v_n Z_n & -v_n
\end{bmatrix} $$
目标向量 $x = (P_{11}, P_{12}, P_{13}, P_{14}, P_{21}, P_{22}, P_{23}, P_{24}, P_{31}, P_{32}, P_{33}, P_{34})^T$,则问题化为最小化 $\|A x\|^2$ 约束于 $\|x\| = 1$。解为 $A$ 的SVD分解 $A = U \Sigma V^T$ 中最小奇异值对应的右奇异向量(即 $V$ 的最后一列)。求得 $x$ 后,$P_{\text{proj}}$ 被重构,然后通过QR分解或SVD分解 $P_{\text{proj}}$ 以提取 $K$ 和 $[R | t]$(需强制 $R$ 正交)[^2][^3]。
#### 3. **DLT算法的实现方法**
DLT的实现分为以下步骤(假设内参 $K$ 已知):
1. **数据准备**:获取至少6个3D-2D点对应($n \geq 6$,因为12个未知数需至少6个点提供12个方程)。
2. **构建矩阵 $A$**:对于每个点,计算两个行向量并填充到 $A$。
3. **SVD求解**:计算 $A$ 的SVD,取 $V$ 的最后一列作为 $x$,并重构 $P_{\text{proj}}$。
4. **分解投影矩阵**:将 $P_{\text{proj}}$ 分解为 $K [R | t]$。由于 $K$ 已知,可直接求解 $[R | t]$:
- 计算 $[R | t] = K^{-1} P_{\text{proj}}$。
- 对 $R$ 进行SVD:$R = U D V^T$,强制 $D$ 为对角元素为1的矩阵(即 $R \leftarrow U V^T$)以确保正交性。
5. **优化(可选)**:DLT解可能受噪声影响,可用Bundle Adjustment(BA)进一步优化[^3]。
以下是Python伪代码实现(使用NumPy):
```python
import numpy as np
def dlt_pnp(points_3d, points_2d, K):
# 输入: points_3d (n x 3), points_2d (n x 2), K (3x3 内参矩阵)
# 输出: R (3x3), t (3x1)
n = points_3d.shape[0]
A = np.zeros((2 * n, 12))
# 构建矩阵 A
for i in range(n):
X, Y, Z = points_3d[i]
u, v = points_2d[i]
A[2*i] = [X, Y, Z, 1, 0, 0, 0, 0, -u*X, -u*Y, -u*Z, -u]
A[2*i+1] = [0, 0, 0, 0, X, Y, Z, 1, -v*X, -v*Y, -v*Z, -v]
# SVD求解
_, _, Vt = np.linalg.svd(A)
x = Vt[-1] # 最小奇异值对应的向量
P = x.reshape(3, 4) # 投影矩阵 3x4
# 分解 P = K [R | t]
R_t = np.linalg.inv(K) @ P # 3x4 矩阵
R = R_t[:, :3]
t = R_t[:, 3]
# 强制 R 为正交矩阵
U, _, Vt = np.linalg.svd(R)
R = U @ Vt
if np.linalg.det(R) < 0: # 确保行列式为1
R = U @ np.diag([1, 1, -1]) @ Vt
return R, t.reshape(3, 1)
```
**注意**:实际应用中需处理噪声和异常值(如使用RANSAC鲁棒估计),且点对应数不足时需结合其他方法如P3P[^3]。
#### 4. **DLT的应用与优缺点**
- **应用**:DLT广泛应用于SLAM、增强现实(AR)和物体姿态估计。例如,在视觉里程计中,结合特征点匹配(如SIFT或ORB),DLT快速估计相机运动;在工业检测中,用于3D重建[^1][^4]。引用[4]提到PnP可转换为ICP问题,但DLT直接提供线性解,避免迭代开销。
- **优点**:
- 计算高效,复杂度为 $O(n)$,适合实时系统。
- 实现简单,无需初始猜测。
- **缺点**:
- 对噪声和误匹配敏感(需至少6个点)。
- 解不严格满足旋转矩阵约束,需后处理。
- 内参未知时性能下降(此时需更多点)。
#### 5. **总结**
DLT是PnP问题的基础线性方法,通过直接求解投影矩阵估计相机姿态。它在少点场景下不如P3P或EPnP高效,但作为初始解常与BA优化结合使用[^3]。实际中,建议在SLAM框架(如ORB-SLAM)中集成DLT,以提升鲁棒性。






 本文介绍了PnP(3D-2D)和ICP(3D-3D)两种定位技术。PnP算法用于解决给定3D点及其2D投影时的相机位姿估计问题,而ICP则通过3D点对进行相机位姿的精确配准,常见于RGB-D SLAM和激光SLAM中。在实际应用中,SLAM通常先用P3P做初步估计,再通过BA进行优化。
本文介绍了PnP(3D-2D)和ICP(3D-3D)两种定位技术。PnP算法用于解决给定3D点及其2D投影时的相机位姿估计问题,而ICP则通过3D点对进行相机位姿的精确配准,常见于RGB-D SLAM和激光SLAM中。在实际应用中,SLAM通常先用P3P做初步估计,再通过BA进行优化。
 461
461

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























