




 本文详细介绍了在Ubuntu 14.04和ROS Indigo环境下,从配置环境变量、编译usb_cam、安装依赖到下载编译ORB-SLAM2的步骤。重点讲解了如何修改ROS版ORB-SLAM2的源码以适配USB摄像头,以及启动ORB-SLAM2 Mono节点的过程。
本文详细介绍了在Ubuntu 14.04和ROS Indigo环境下,从配置环境变量、编译usb_cam、安装依赖到下载编译ORB-SLAM2的步骤。重点讲解了如何修改ROS版ORB-SLAM2的源码以适配USB摄像头,以及启动ORB-SLAM2 Mono节点的过程。
实验环境ubuntu 14.04+ros indigo
Step1: 配置环境变量
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src
在’src’目录中可能没有任何软件包,只有一个CMakeLists.txt,返回到catkin_ws中依然可以编译它:
$ cd ~/catkin_ws/
$ catkin_make
gedit ~/.bashrc,之后在.bashrc 最下面添加:
source /opt/ros/indigo/setup.bash`
source ~/catkin_ws/devel/setup.bash`
Step2:编译usb_cam
在~/catkin_ws/src下创建usb_cam,并编译
cd usb_cam
git clone https://github.com/bosch-ros-pkg/usb_cam.git
$ mkdir build
$ cd build
$ cmake ..
$ make
编译成功后可先测试一下usb摄像头
首先开个新的终端,运行roscore,
完成之后再开一个终端, 运行
roslaunch usb_cam usb_cam-test.launch 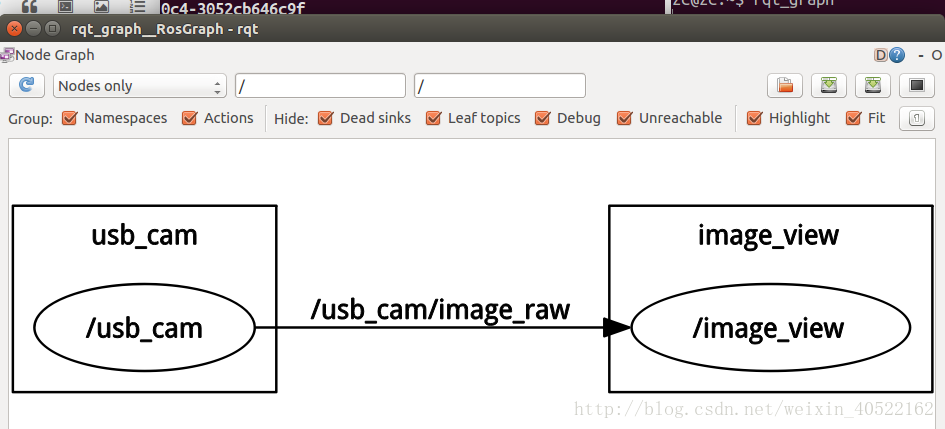
PS: 在运行该节点之前,需要先配置一下节点参数,打开sr
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2864
2864

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









