




1、用python编写文件
对于python 来说,我们不需要使用 catkin_make 命令对 ~/catkin_ws 工作空间进行编译。因为python文件本身就是可执行文件(前提是我们给它添加可执行权限)。
不要忘了给这个listener.py 加可执行权限:
$ chmod +x listener.py
2、虚拟器上操作turtlebot
1、在ArbotiX模拟器上启动模拟的turtlebot
$ roslaunch rbx1_bringup fake_turtlebot.launch
2、启动RVIZ
$ rosrun rviz rviz -d `rospack find rbx1_nav`/sim.rviz
3、使用键盘
roslaunch rbx1_nav keyboard_teleop.launch
3、source
1)使用ROS,首先source ~/.bashrc
如果还是无法启动roscore就,source /opt/ros/melodic/setup.bash
2)在catkin_ws文件夹下操作使,使用:
cd catkin_ws
source devel/setup.bash
查看电脑内存情况
htop
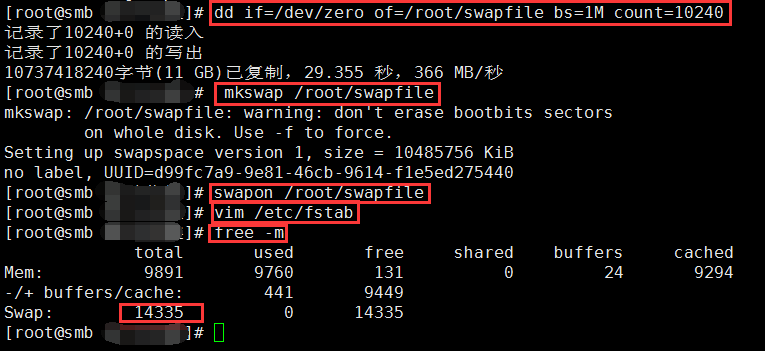
4、扩展Swap分区
1.创建要作为swap分区的文件:增加10GB大小的交换分区(原理的swap分区不变),则命令写法如下,其中的count等于想要的块的数量(bs*count=文件大小)。
# dd if=/dev/zero of=/root/swapfile bs=1M count=10240
2.格式化为交换分区文件:
# mkswap /root/swapfile #建立swap的文件系统
3.启用交换分区文件:
# swapon /root/swapfile #启用swap文件
4.使系统开机时自启用,在文件/etc/fstab中添加一行:
/root/swapfile swap swap defaults 0 0

















 1109
1109

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









