



皮下避孕植入剂植入辅助装置
1 背景
在中低收入国家(LMICs)提供计划生育服务是全球卫生界的主要关注点[1]。世界银行估计,撒哈拉以南非洲地区仅有45%的避孕服务需求得到满足[2]。长效避孕方法的可及性对于希望将怀孕间隔两年或更长时间的女性尤为重要。
宫内和皮下植入式避孕方法是目前最有效的可逆避孕方法[3]。皮下植入物为单杆(或双杆)装置,含有依托孕烯,植入于女性非优势手臂内侧的皮下[4]。单杆装置(例如 Impla‐non和内欣侬)可防止怀孕长达3年,而双杆装置(例如杰代尔和中出植入剂)可防止怀孕长达5年。此外,植入物无需使用者进行维护或操作,允许女性在停用后迅速恢复生育能力,且失败率极低[5]。
尽管可植入式避孕药具有显著的优势,但其广泛应用仍存在重大障碍,即进行植入/取出操作所需的培训和技能。在农村地区,由于卫生诊所、医疗设备和经过培训的临床医生的获取更为有限,这一障碍尤为突出。本文详细介绍了创新的任务转移装置的设计,该装置使社区卫生工作者能够植入皮下避孕植入剂。本研究的最终目标是降低低收入和中等收入国家农村女性使用长效避孕植入剂的门槛。
2 方法
2013年8月,在埃塞俄比亚亚的斯亚贝巴的圣保罗医院开展了设计民族志研究,以识别和描述未被满足的孕产妇健康需求。
共识别出85项需求,其中包括需要一种辅助医疗保健提供者插入皮下避孕植入剂的装置。
从关键利益相关者处获取了包括准确性、安全性和易用性在内的用户需求,并通过临床文献和基准确定了其他需求。这些需求被转化为工程规格,并利用向关键临床利益相关者发放的调查结果进行优先级排序。
通过功能分解来促进概念生成。在此过程中确定了九个子功能:(1)定位植入位置,(2)防止锐器伤害,(3)将用户输入转化为运动,(4)为植入准备皮肤,(5)刺破皮肤,(6)将植入物移至最终位置,(7)释放植入物,(8)防止未经消毒的二次使用,以及(9)在释放前固定植入物。概念生成阶段共产生了约60种设计方案,并依据需求和规格采用Pugh矩阵对其进行评估。
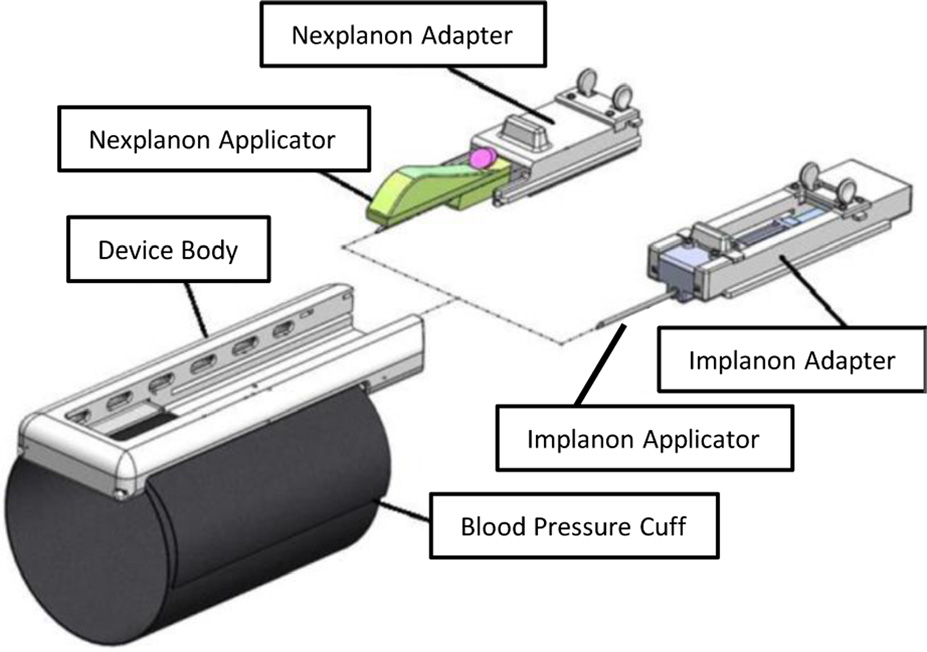
所选概念如图1所示。该装置由两个主要部分组成:装置主体(连接至血压袖带)和施用器适配器(一个用于依伴侬,一个用于内欣侬)。这些适配器可支持依伴侬和内欣侬的植入操作。所选概念的植入过程如图2所示。血压袖带充气至预设压力,使皮肤和皮下组织隆起并进入装置主体内部的空腔(注射窗)。皮肤/组织的位移由注射盖的高度控制,从而确保依伴侬/内欣侬施用器针头能够以精确的深度平行于皮肤插入。
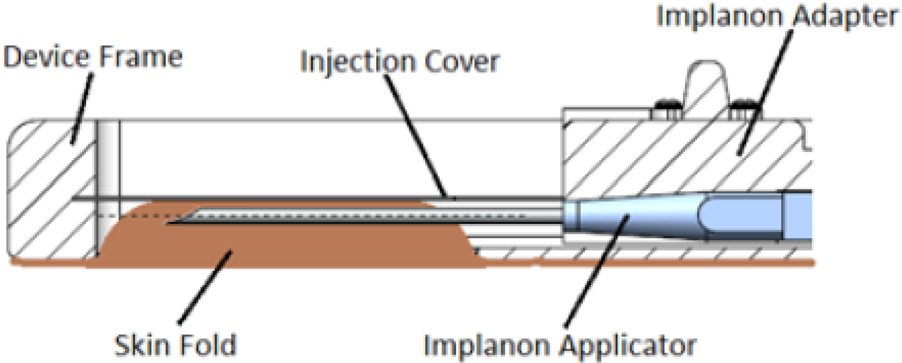
临床操作首先需要在手臂内侧距髁上8–10厘米处标记植入位置。随后,对植入部位进行消毒,并实施局部麻醉。完成这些步骤后,即可使用该设备辅助植入物的植入。将设备主体用血压袖带缠绕在女性上臂(使窗口与标记的植入位置对齐)。然后将袖带充气至40毫米汞柱(推动皮肤和皮下组织进入植入窗口)。选择合适的适配器(用于依伴侬或内欣侬),并将施用器插入适配器中。再将适配器放入设备主体内,使针头位于皮肤下方的预定深度(刚好进入皮下组织内)。
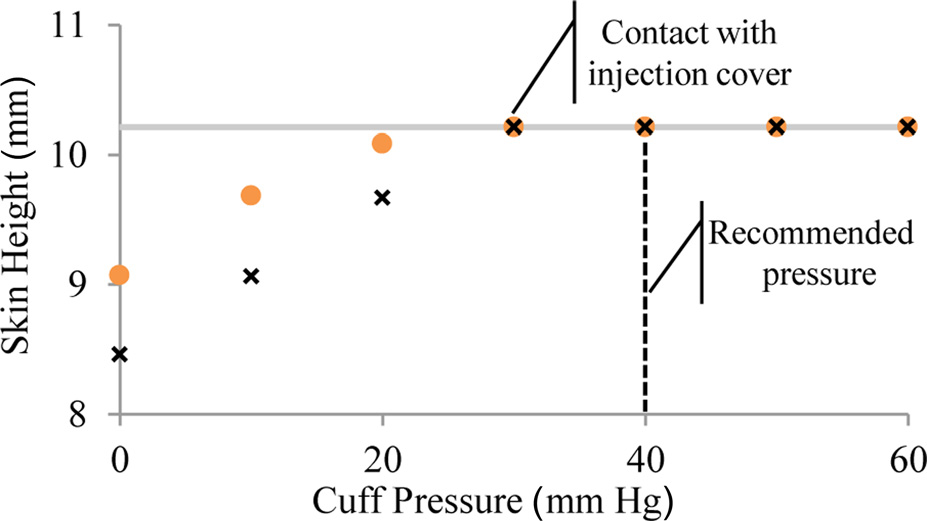
通过两项非临床研究验证了概念可行性。第一项非临床研究评估了血压袖带施加的压力对植入窗内皮肤/组织变形反应的影响。该研究旨在确定确保皮肤和皮下组织稳定且正确地顶起至注射盖所需的压力最小值。研究团队成员的手臂和猪腹模拟器被用于指导该压力的选择,并在每个压力水平下进行了三次测量(图2)。
第二项非临床研究比较了新手用户(模拟社区卫生工作者)在无辅助与有辅助情况下植入物放置(深度)的效果。三名新手用户使用猪腹模拟器对每种植入方法各重复操作三次。所使用的四种植入方法分别为:依伴侬的无辅助植入(基线 Im)、内欣侬的无辅助植入(基线 Nx)、使用依伴侬辅助适配器及装置进行植入(原型 Im),以及使用内欣侬辅助适配器及装置进行植入(原型 Nx)。
3 结果
基于所选概念的原型采用3D打印技术制造,可用于进行非临床研究。
首次非临床研究表明,使用30毫米汞柱的压力可实现注射盖与皮肤/组织的充分接触(图3)。为考虑潜在的变异性,将40毫米汞柱确定为推荐的最小压力。
4 解读
上述插入深度结果(表1)表明,新手用户可以使用该原型成功植入依伴侬和内欣侬植入物。此外,与传统的无辅助方法相比,新手使用辅助装置能更一致地将植入物插入目标深度。本文所述装置有望在植入避孕植入物时减少主要的用户误差(植入深度),因此可能有助于将植入操作任务转移给低收入和中等收入国家的社区卫生工作者,从而扩大农村地区对这种高效避孕方式的获取。
与临床医生、农村医疗工作者和卫生部官员等关键利益相关者的后续可用性及可行性研究揭示了设计上的不足,包括:由于设备的可重复使用性可能带来的交叉污染风险、缺乏对麻醉输送的辅助功能,以及原型尺寸过大。未来的设计迭代将解决这些问题,修订后的设备将在临床前和临床试验中进行评估。
| 基线 | 原型 | 目标深度 | |||
|---|---|---|---|---|---|
| Ima | Nxb | Im | Nx | ||
| 深度(毫米) | 4.0 ± 1.5 | 2.9 ± 0.5 | 2.1 ± 0.7 | 2.4 ± 0.6 | 1.7 ± 0.6 |
注:Ima — 依伴侬;Nxb — 内欣侬

















 6730
6730

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









