



用于快速瞬态CMOS降压转换器的低功耗高转换速率误差放大器设计
摘要
提出了一种电压提升控制(VBC)方法,以实现用于增强直流‐直流转换器负载瞬态响应的低功耗和高转换速率误差放大器。VBC被用来增加/减少误差放大器输出级晶体管的栅极电压,从而在瞬态期间以简单的电路结构提供大的电流驱动能力。此外,在稳态时关闭误差放大器的加速方案以实现节能。
采用0.35‐μm 2P4M CMOS工艺设计了一款采用VBC方法的降压变换器。与未采用VBC的情况相比,实验结果表明,在负载电流从50毫安变化到500毫安时,采用VBC的降压变换器的输出电压变化和恢复时间分别改善了两倍以上和十倍以上。
关键词
直流‐直流转换器,误差放大器,瞬态响应,转换速率
一、引言
近年来,平板电脑和智能手机等电池供电的便携式电子设备已成为我们日常生活中不可或缺的一部分。为了延长这些移动设备的工作时间,由于直流‐直流转换器具有高功率效率,因此被广泛使用。此外,电压调节和动态响应的规格对直流‐直流转换器也非常重要。一旦负载电流发生显著且立即的变化,直流‐直流转换器的输出电压变化可能会导致系统性能下降甚至崩溃。因此,直流‐直流转换器必须保持快速瞬态响应并具有较小的瞬态纹波。
脉冲宽度调制(PWM)在直流‐直流转换器中被广泛应用。由于系统稳定性的考虑,直流‐直流转换器的误差放大器通常需要进行频率补偿。但较大的补偿电容连接在误差放大器的输出节点上,严重降低了直流‐直流转换器的瞬态响应性能。已有多种不同的方法被提出以改善直流‐直流转换器的瞬态响应[1]‐[6]。一种采用辅助晶体管的误差放大器被提出,可在瞬态期间增强源/灌电流[1]‐[2],但该误差放大器的电流驱动能力与辅助晶体管的尺寸相关。
通过将占空比饱和至100%或0%并减小反馈延迟,滞环控制可以实现短恢复时间[3]‐[4]。然而,由于开关频率的变化,直流‐直流转换器容易出现电磁干扰问题。V2C 控制被用于增强瞬态响应,但三个环路增加了控制设计的复杂性[5]。通常采用 PID 补偿来扩展转换器带宽,同时维持系统稳定性。然而,该方法需要较大的补偿电阻和电容来产生低频极点和零点[6]。
本文提出了一种采用电压提升控制(VBC)的低功耗误差放大器。该误差放大器在瞬态期间通过引入小型辅助晶体管实现高转换速率,而在稳态时关闭辅助晶体管以实现节能。VBC方案应用于降压型DC‐DC变换器的设计中,从而实现快速瞬态响应。
第二节分别介绍了传统高转换速率误差放大器和所提出的误差放大器的设计。第三节展示了仿真与实验结果。最后,第五节给出了结论。
II. 具有所提出误差放大器的快速瞬态降压变换器设计
A. 传统高转换速率误差放大器

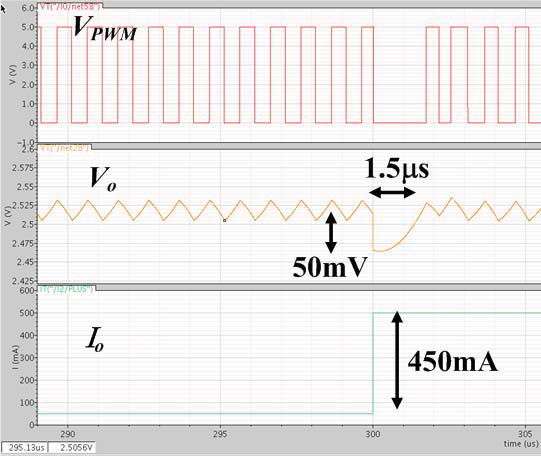
图1展示了采用所提出的电压提升控制(VBC)的电压模式降压转换器的模块原理图。该VBC电路结构简单,可在瞬态期间显著增强误差放大器的电流驱动能力。传统的和所提出的高摆率误差放大器将在接下来的小节中介绍。
图2[1]‐[2]示出了一个传统高转换速率误差放大器。该辅助电路由两个辅助晶体管Mn和Mp以及一个用于压摆率增强的控制电路组成。Mn 和 Mp 由控制电路控制,并在稳态时关断。当控制电路输入端之间的电压差足够大时,Mn/Mp 导通,为电压Vea 提供额外的放电/充电电流。晶体管Mn和Mp与输出晶体管M2和M1并联,因此该方法似乎会增大输出晶体管的宽长比。为了实现快速的恢复时间,需要足够的瞬态充放电电流。因此,辅助晶体管的宽长比通常较大,因为晶体管的漏极电流与其宽长比成正比。
B. 具有电压提升控制(VBC)的误差放大器
 带有提出的VBC的误差放大器和(b) 单级差分放大器。)
带有提出的VBC的误差放大器和(b) 单级差分放大器。)
 带有提出的VBC的误差放大器和(b) 单级差分放大器。)
带有提出的VBC的误差放大器和(b) 单级差分放大器。)
图3(a)展示了采用所提出的VBC的误差放大器的电路原理图。核心电路由晶体管M1到M9组成,是一个传统的运算跨导放大器(OTA)。VBC由两个单级差分放大器 OP1和OP2以及两个辅助晶体管MA1和MA2构成。图3(b)显示了放大器OP1和OP2的原理图。OP1和OP2的作用是在瞬态期间导通辅助晶体管,而在稳态时将这两个辅助晶体管关断。此外,OP1和OP2设计为低静态电流以实现节能。
所提误差放大器的工作原理描述如下。当负载电流从重载显著切换到轻载时,降压变换器的输出电压从其额定值上升。当输出反馈电压 Vfb超过参考电压 VrefH时,OP2 导通 MA2。与补偿电容 Cc相比,M5和 M9的栅极电容很小,因此即使晶体管尺寸较小,栅极电压 Vg9也能暂时被拉高至高电平。由于工作在饱和区的晶体管的漏极电流与栅极电压呈平方关系,漏极电流 IM9显著增加,从而立即对补偿电容 Cc进行放电。因此,在相同电流值的情况下,所提方法比传统方法更面积高效。因此,电压 Vea迅速且显著地下降,从而显著缩短了降压转换器的恢复时间。根据 VrefH与 Vfb之间的差值,OP2 自适应地调节电流 IM9。因此,与数字控制相比,VBC方法更容易防止输出电压发生过冲。当电压 Vfb低于 VrefH时,晶体管 MA2被关断,随后核心OTA电路将控制 Vg9。
另一方面,当负载电流从轻载快速切换到重载时,Vfb降至参考电压 VrefL以下,导致晶体管 MA1导通。因此,栅极电压 Vg8被暂时拉低至低电平,然后电流 IM8显著增大,从而对电容 Cc充电。因此,降压变换器的瞬态响应得到极大改善。由于辅助晶体管 MA1和 MA2仅在瞬态期间导通,采用 VBC 的误差放大器在保持低静态电流的同时实现了快速瞬态响应。
由于在瞬态下可以通过VBC调节IM8和IM9,因此误差放大器的跨导可视为是变化的,如图4所示。gm,D是在 VBC禁用时计算得出的。
$$
g_{m,D} = \mu_p C_{ox} \left( \frac{W}{L} \right)
{M2,M3} \sqrt{2 \frac{I_d}{(W/L)
{M5}}}
$$
(1)
其中Id为流经M2或M3的电流。一旦OP2开启以增强瞬态响应,带VBC的误差放大器的跨导将从gm,D增强至gm,E,可由此推导得出
$$
g_{m,E} = g_{m,D} \times \left(1 + \frac{\Delta V_{MA2}}{V_{g9} - V_{tn}}\right)^2
$$
(2)
其中Vtn是n型晶体管的阈值电压,ΔVMA2表示瞬态期间由 MA2引起的增量。
III. 仿真与实验结果
采用0.35‐μm 2P4M CMOS工艺设计了一个降压变换器,以验证VBC的性能。芯片布局如图5所示,包含焊盘在内的芯片尺寸为 1485×1308 μm²。降压型DC‐DC变换器的规格列于表I中。在考虑输出电压纹波、输出电容的等效串联电感以及走线阻抗的情况下,参考电压VrefL和VrefH设置为偏离标称电压40 mV。实验中的输出电压和输入电压分别为2.5 V和5 V。
| 表I 降压变换器的设计参数 | |
|---|---|
| 输入电压,Vin | 4~5.5 V |
| 输出电压,Vo | 2~3.3 V |
| 负载电流,Io | 500 毫安 |
| 开关频率,fs | 1 兆赫 |
| 输出电感,L | 4.7 μH |
| 输出电容,CO | 10 μF |
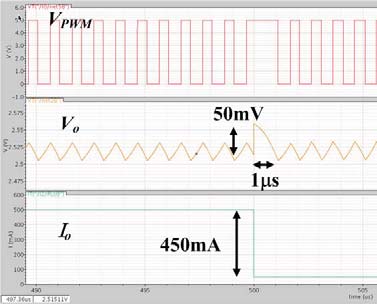
 升压和(b)降压负载下的仿真波形。)
升压和(b)降压负载下的仿真波形。)
|
升压和(b)降压负载下的仿真波形。)
图6显示了采用VBC的降压变换器在升压和降压负载下的仿真波形。图中,三个信号分别为PWM信号 VPWM,输出电压变化 ΔVo,以及负载电流 Io。得益于 VBC方法,误差放大器的驱动能力被极大增强,当负载电流在50至500毫安之间变化时,VPWM的占空比达到饱和(0%或100%)。因此,降压变换器能够以输出电感的最大电流变化率运行,从而显著改善了恢复时间和输出电压变化。
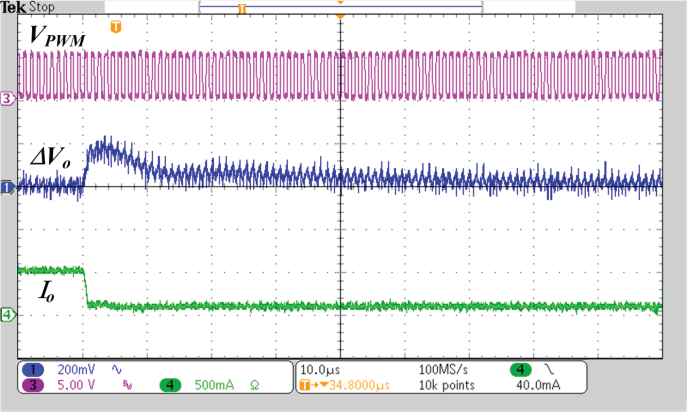
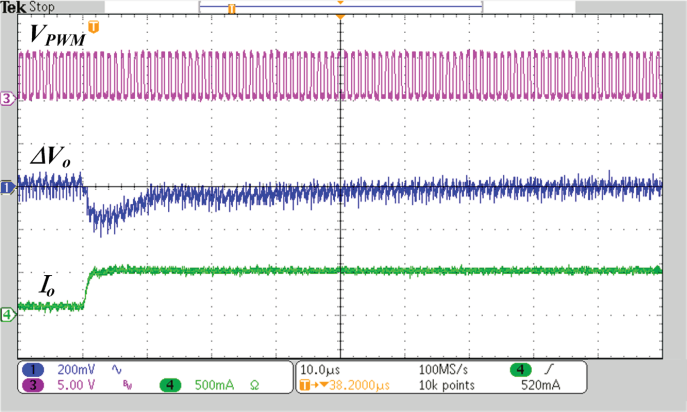
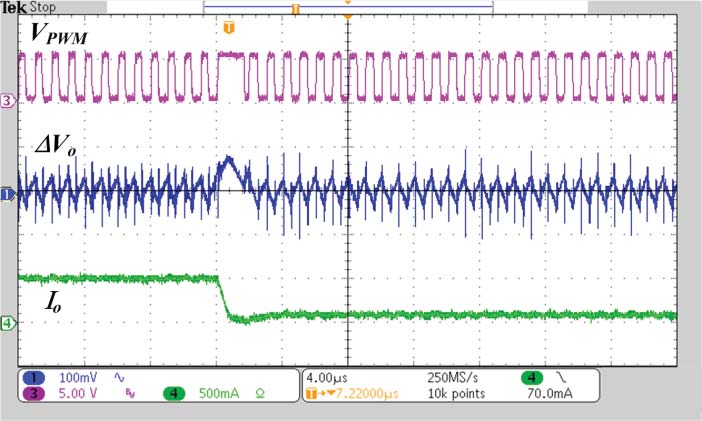
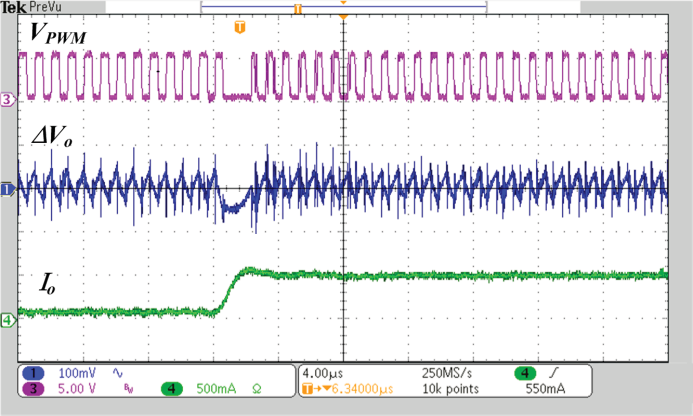
降压负载和 (b) 升压负载。)
降压负载和 (b) 升压负载。)
降压和(b)升压负载下的实测波形。)
降压和(b)升压负载下的实测波形。)
图7和图8显示了在450毫安负载电流变化下,未使用和使用VBC的降压变换器的实测波形。采用VBC方法的降压变换器的输出电压变化和恢复时间可分别改善至小于 80 mV和3 μs。与未使用VBC的降压变换器相比,输出电压变化和恢复时间的性能分别提升了两倍以上和十倍以上。
IV. 结论
本文提出了一种面积高效且简单的实现高转换速率误差放大器的方法。通过VBC方法增加/减少误差放大器输出级晶体管的栅极电压,从而在瞬态下实现误差放大器的高电流驱动能力。当降压变换器恢复到稳态时,误差放大器的加速方案被关闭以实现节能。
实验结果表明,采用VBC方法的降压变换器的恢复时间和最大输出电压变化均得到显著改善。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









