




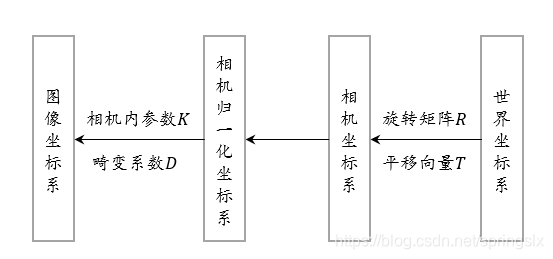
一、坐标系简介
1、世界坐标系:三维世界中定义的坐标系,用(X, Y, Z)表示其坐标值。
2、相机坐标系:以相机的光心为坐标原点,通常情况下定义Z轴指向相机前方,X轴指向相机平面向右,Y轴向上,满足右手法则。其坐标值表示为(x, y, z)。
3、相机归一化坐标系:该坐标系没有实际的物理意义,与相机坐标系只差一个尺度缩放因子。
4、图像坐标系:以相机光心在图像平面的投影点为坐标原点,X轴和Y轴方向与相机坐标系方向一致,用(u,v)表示其坐标值。
5、像素坐标系:以图像平面的左上角顶点为原点,u轴(X轴)向右与x轴平行,v轴(Y轴)向下与y轴平行。像素坐标系与图像坐标系之间差了一个缩放和原点的平移。
(注:上图中的图像坐标系与此处第五条像素坐标系相对应)
二、各坐标系之间的变换关系
如下图所示,O-x-y-z为相机坐标系,O’-x’-y’-z’为图像坐标系。点P是空间中一点,在成像平面上的投影点是P’。
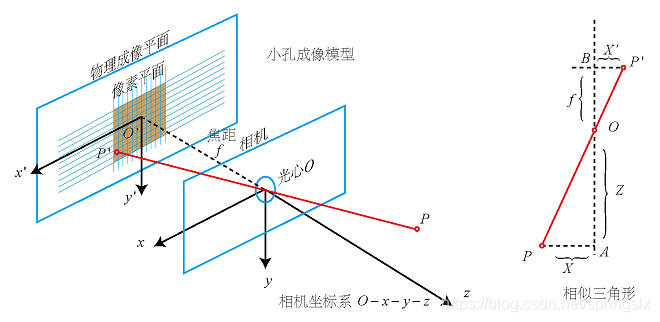
设P在相机坐标系下的坐标是 [X,Y,Z]T,P’在图像坐标系的坐标是 [X′,Y′,Z′]T,在像素坐标系下的坐标是 (u,v)。且成像平面到光心的焦距f已知。以此推导相机坐标系与像素坐标系之间的关系。
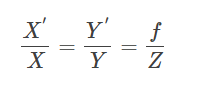
首先由三角形相似原理可以得到各坐标的绝对值之间有如下等式。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 714
714

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









