 EDUROSC-Kids机器人教学法
EDUROSC-Kids机器人教学法




基于EDUROSC‐Kids的机器人学习方法论
1 引言
当前教育与技术领域的研究重点是找出并解决儿童学习中的主要问题,例如挫败感和注意力不集中等。随着科学与技术的发展,人们已开展了多项创新性研究,这些研究主要基于技术辅助学习方法[32],以帮助解决这些问题。在这一方向上,机器人技术是一种重要的工具,已被用于增强学生能力并促进其学习,这一点已得到多位研究人员的证实[3, 5, 43, 47]。事实上,教育被认为是机器人技术的一个重要应用领域,学生和教师在此领域中应用和使用机器人技术工具,因此有必要更好地理解两者。
在过去几十年里,机器人学术语意味着某种未来才会使用的东西,包括技术以及通常在电影中看到的许多人工制品。然而,机器人技术领域自六十年代末和七十年代初以来就已经影响并促进了教育的发展,当时西摩·帕普特提出了使用Logo作为幼儿计算机编程语言的想法[9]。事实上,这一理念已得到广泛传播,如今已成为全球多所学校课程大纲中名为教育机器人这一知识领域的组成部分。
自1980年以来,人们提出了多种关于教育机器人的定义。一个很好的例子是妮基[11]的研究,她将其定义为一种将机器人引入教室的工具,用于教授语言、科学以及学习过程中的其他传统领域。从这些早期研究开始,机器人技术在教育中发挥了重要作用,并推动了产业(即当今的第四次工业革命产业)的发展,该产业需要在这一领域具备更多知识的专业人才,以优化时间和财务资源,取得更好的成果。
在课堂中使用机器人技术时,实际的人(学习者/ 教师)‐机器人交互(HRI)以及其他相关架构[8]和该方法对HRI的影响也随之产生。这还包括机器人伦理和人类福祉,如IEEE标准7007以及IEEE标准7007[33]和关于评估自主和智能系统对人类福祉影响的推荐实践的IEEE标准7010[19],中所述。尽管目前已有一些较新的研究在HRI、伦理和人类福祉方面取得了丰硕成果,但这些主题超出了本文的范围,本文基于我们先前的研究成果[34, 40]展开。从这些前期工作中我们注意到,为教育机器人标准化内容、技能和评估至关重要[34]。这样,就可以确定每个年龄阶段和/或专业水平在开展机器人项目时所需掌握的概念。
此外,在涉及儿童时,标准化变得尤为关键,因为它必须与一个国家的中小学教育课程严格关联。例如秘鲁基础教育国家课程和巴西国家共同课程基础( BNCC)。还应制定一种根据这些本地指导方针评估儿童进步情况的方法[40]。
将机器人课程及其评估纳入教育环境只是实现机器人技术广泛应用的第一步,也是基础性的一步。下一步是将机器人课程与通用课程(中小学教育课程)相衔接。这种衔接必须包括在学习过程中使用机器人原型的教学方法和策略,以及如何在机器人培训中运用来自STEAM及非STEAM学科的通用知识[28]。这两种教育机器人应用方式各有其特点。并分享挑战;因此,应用程序的策略必须由一个标准化且灵活的流程来指导,该流程包括上述链接。
基于此,本文结合并拓展了我们的两项前期工作。第一项工作提出了EDUROSC‐Kids课程,用于教授6至18岁儿童,并确立了相应的能力、技能和知识水平[34]。第二项工作提出了一种评估量规,通过三个标准(设计、搭建与编程以及软技能)来衡量学习进展[40]。本研究的主要贡献是为教育机器人领域的上述两种方法,结合EDUROSC‐儿童课程,制定一套指导方针和策略,这是将一般学习过程与这些方法相结合的关键步骤。
从这个意义上说,本论文的结构如下。在第2节中,解释了实施教育机器人技术的两种方法。第4节介绍了EDUROCS‐儿童课程。在第5节中,概述了应用EDUROSC‐Kids课程的指导方针和方法论。第6节展示了使用本文提出的指导方针、EDUROSC‐儿童课程以及引入的评估量规的实际经验。最后,在第8节中得出了本研究的结论,并对结果和主要进一步贡献进行了最后讨论。
2 教育机器人及其方法
在相关文献中可以找到关于教育机器人技术的多种定义。一些论文除了讨论教育机器人技术外,仅涉及使用机器人进行教学内容传授,而这些内容有时与机器人的使用关系不大,甚至不使用这种强大工具[10, 36, 45]也能完成。
关于其定义,佩德罗索和马夫拉[35],以及席尔瓦[43]提出的定义是很好的例子。前者认为,教育(或教学)机器人技术是指在教师与学生互动的教学环境中,使用由硬件(系统的物理组成部分,可使用购买的材料、废旧物品或组装套件)和软件(用于控制机器人的系统逻辑组成部分)构成的机器人系统[35]。然而,根据席尔瓦的说法,它是一种通过机器人作为媒介的教与学的过程,旨在多个知识领域中构建知识,并可应用于不同层次和阶段的教学[43]。
德尔加多[11]是最早提出可以将教育机器人用作教授数学、科学和其他学科工具的人之一。TRTWR(教授机器人技术,使用机器人技术进行教学)研讨会2012年成为讨论机器人技术在教育中的主要作用以及界定其研究方向的平台。卡特林和罗伯逊[9]区分了教育机器人和机器人教育这两个术语。前者可用于定义使用机器人进行教学,而后者则指关于机器人的教学。此外,他们指出,如果目标是教授机器人技术,则可以利用机器人来进行教学,并发挥教育机器人的优势。最后,同样地,迪米特里乌[12]提出了一种使用机器人教授机器人技术的方法论(表1)。
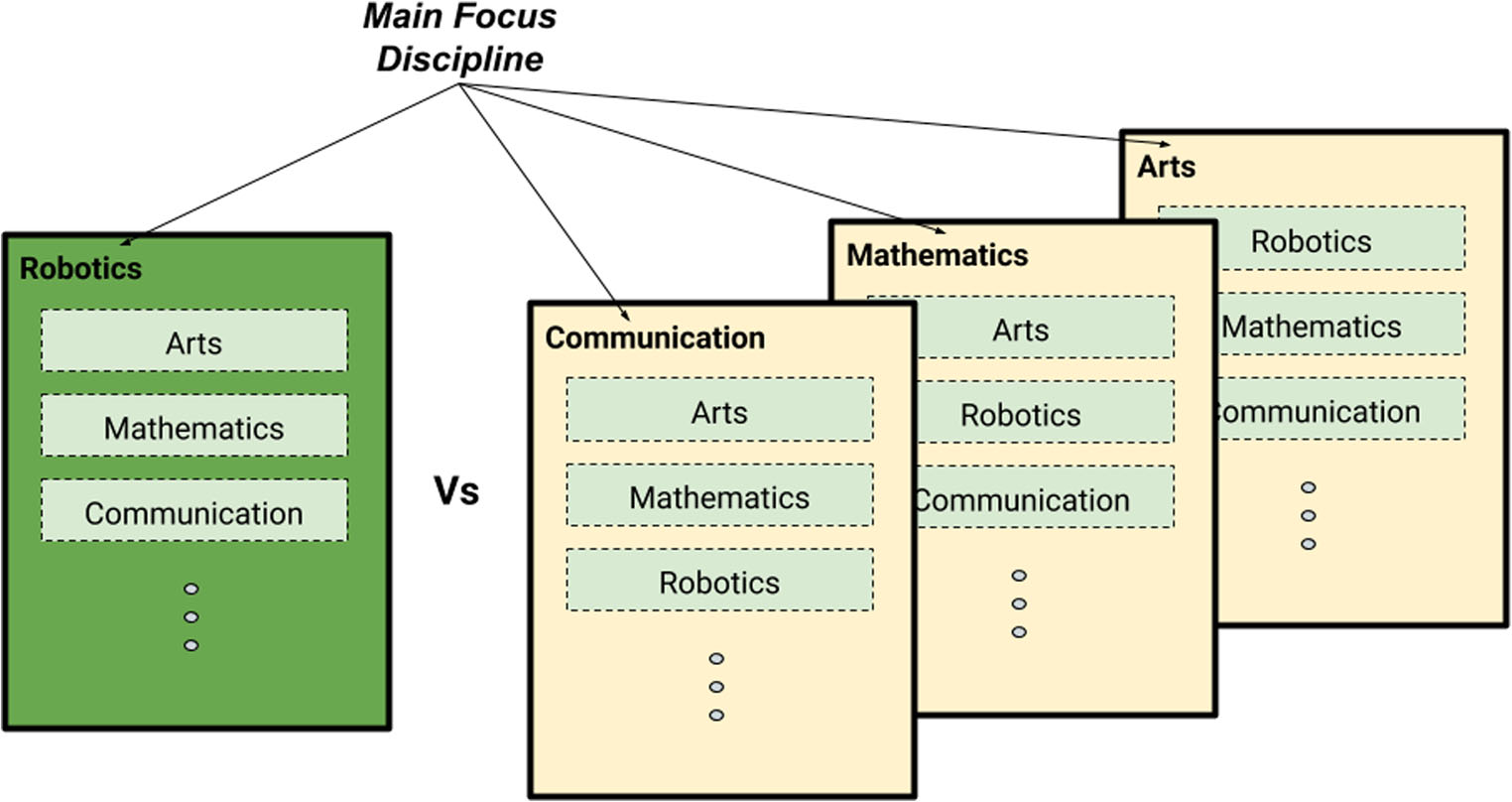
在本文中,教育机器人主要被理解为将机器人技术及其相关主题引入学生正在学习的特定课程内容知识体系中的过程。在学习过程中引入教育机器人可以通过遵循两种范式来实现(见图1):机器人技术作为主要角色/主角/主题,或作为辅助角色/主题。
文献中发现的每项关于教育机器人技术的研究都可以归类为上述两种范式之一。这意味着,这些研究可以被归类为用机器人进行教学或教授机器人技术。因此,教育机器人技术可以定义为将机器人技术及其所有背景知识融入特定课程之中。更重要的是,在这种融合中,机器人技术可以是主要重点,也可以是次要重点(如上所述)。接下来,我们将描述机器人技术作为主角以及作为辅助学科的情况。
2.1 机器人作为主要重点
智能机器人、物联网(IoT)、数字仿真和机器人编程是大众中的流行术语,因为这些是相当新颖的新兴技术。因此,为了能够在这所有前述领域中开展项目,必须具备机器人技术方面的知识和技能。在这方面,许多方法提出了在机器人技术基础的主要领域中发展技能:机械、电子和计算机。
上述方法的示例可在迪米特里乌[12],的研究中找到,他提出了一项面向主修计算机科学的高中生教授机器人技术主要概念的课程。在普拉扎等人[37]的研究中,设计了一门教授机器人技术的课程
表1 机器人教育 ×机器人教育
| 机器人作为主要重点 | 机器人作为次要重点 | |
|---|---|---|
| 学习机器人技术 | 学习其他科目 | |
| 将其他科目作为工具 | 它是帮助学习其他科目的工具 | |
| 机器人教育[9] | 机器人教育[9] |
向10岁及以上的儿童提出了不同的平台。最后,巴雷托等人[6]的论文对2000年至2009年间关于在学校中使用机器人技术的已发表科学文献进行了综述。该研究分析了101篇论文,其中80%探讨了与机器人技术相关的主题。因此,所有这些都被视为以机器人作为主要重点的机器人教育方法。
2.2 机器人作为次要重点
如今可以找到多种利用机器人作为工具来教授 STEAM和非STEAM主题的方法。除了科学、技术、数学、工程和艺术之外,还包括宗教、语言和历史等学科。这些方法的主要目标是提供比使用传统材料更高的学习效率,因为传统材料有时会被一些儿童群体认为枯燥乏味。
这一范式包括庞塞等人[38]的研究,他们解释了使用不同机器人技术平台来教授声音传播、公制系统、分数以及一些物理内容等主题的方法。该研究的作者比较了使用机器人与不使用机器人教授上述主题的教学效果。主要结论是,机器人有助于教学,但教师在学习过程中同样起着非常重要的作用。类似的结果也在巴里奥斯‐阿兰尼瓦尔等人[5]和托马兹等人[47]的研究中得到观察。其他以机器人技术为次要重点的例子包括:塞戈维亚和苏扎[42]将机器人技术作为英语教学的激励工具;以及克塞夫特里斯等人[49]利用机器人技术及相关技术进行地理与历史的教学。
3 相关工作(研究现状)
许多方法已被开发出来,以激励儿童、教师、学校和行业提高他们的技术素养。郑等人[24]发表了一项研究,综述了30多项工作,阐述了使用教育机器人激励儿童学习的诸多益处。他们指出,这些研究都识别出两个要点:第一,机器人技术能够连接不同领域的其他技能;第二,与学生的年龄有关,因为幼儿能够学习到与其他儿童一样多的能力。正如郑提到的,机器人技术是一种工具,许多学生可以通过它在真实情境中看到并应用自己的知识。米西里利等人[31]提到,学生可以将机器人技术作为一种工具,帮助他们发展技能并增强自身能力。

他们的学习,因为他们是这一过程中的主动参与者,而不仅仅是技术的消费者。安瓦尔等人[2]提出了一项关于机器人技术在学习过程中益处的139种方法的研究。他们提到,机器人技术提供了理解和探索实际问题解决方案的机会,许多其他作者也表明学生能够提升其知识水平。学生在科学、工程及其他学科(如艺术)方面发展了技能。这些研究表明,许多通过机器人参与教育的学生选择了工程类专业,并通过迭代的设计过程培养了解决各种问题的能力。
其他一些经验,例如北野浩哉等人[26]所阐述的 Robocup青少年项目,旨在向学校、儿童甚至其家庭教授工程学和机器人技术知识。霍布森[18]报告了其他成果,他描述了与来自不同学校的学生合作开发机器人以帮助社会,并促进团队合作和社会化的经验。此外,霍伊尔[17]描述了一个为博物馆开发机器人的项目,该项目包含了学生软技能的发展。
EDUROSC‐儿童是一种为儿童组织机器人学习主题的方案,同时描述了这些主题如何面向儿童进行教授。已有很多不同的项目被提出用于向儿童教授机器人技术,例如霍霍阿等人、布兰卡斯等人。霍霍阿等人[23]提出了一种面向儿童的移动机器人教学方法论。该方法论包含四个步骤,用于设计移动机器人的解决方案。作者表示,问题解决习惯贯穿于整个课程中。布兰卡斯等人[7]提出了一种名为CREA的方法论,包含六个课次,旨在教授儿童编程。他们使用Arduino平台,并通过威尔科克森符号秩检验对其方法进行评估。他们对一组儿童进行了评估,结论是在六个课次后,儿童的行为得到了改善。
然而,儿童探索了与机器人技术相关的不同主题,作者提出了CREA以教授编程。在此情况下,他们使用机器人来激发儿童的兴趣。斯卡拉多齐等人[41]阐述了一个将教育机器人引入学校的特定项目。该项目为小学阶段的五个周期设定了具体目标。许多方法被提出,用机器人教授其他概念,如数学、计算机科学等。弗里布罗姆等人[15]展示了利用机器人向儿童讲授计算机科学概念的教学实践。郑等人[24]总结了41篇文献,解释了在STEM教育背景下教授机器人教育目标、内容和方法的不同途径。菲利波佩特等人[14]提出了一项在中学开展机器人教学的实践。所有这些研究都提出了特定的教学方法并描述了其实践经验。然而,由于这些方法在目标、硬件和用户方面未被泛化,因此无法直接应用于其他实验。本研究提出了一种教授机器人技术的方法论,教师和使用者可依据此指南设定教学目标、规划活动,并自主选择所用材料、特定主题和项目。
4 EDUROSC‐儿童 标准
EDUROSC‐儿童[34]不仅仅是一个机器人课程的提案。它旨在为儿童组织机器人学习主题,包括学习过程中应达到的预期成果,下文将对此进行描述。关于课程本身,它将机器人技术内容划分为五个学科,如图2所示。这五个学科分别是:机器人与社会、机械、电子、编程和控制理论。此外,它还为每个学科考虑了一组主题,并
根据布鲁姆命名法,为每组儿童定义了实现目标所需达到的知识水平。这些小组的划分基于儿童年龄,类似于K‐12教育体系的分组方式:G1(第一组)对应小学阶段,G2(第二组)对应初中阶段,G3(第三组)对应高中阶段。接下来将对这些学科、主题以及建议的知识水平进行说明。
4.1 机器人与社会
工程师、实践者以及任何人所开发的所有技术都必须帮助人类,并为社会和公共利益的发展做出贡献。基于这一观点(无论是隐含还是明确地),许多研究人员通常会提出将机器人技术应用于几乎所有知识领域,例如:医疗保健[1],旅游业[21],和农业[48],等等。这种现实促使我们必须教授“机器人与社会”这一学科,以培养学生对机器人如何影响社会的认知。
该学科旨在向学生阐明伦理以及有关机器人原理的一般知识等主题[16]。本学科所定义的内容如表2所述。因此,该学科基本由五个主题内容构成:机器人学历史、自动机、教育机器人硬件、机器人新闻以及机器人创新与研究项目。其主要目标是为学生提供机器人技术前沿的总体概况,并阐明当今机器人技术如何影响我们的社会。为此,第一阶段是讲授机器人学的历史、术语“机器人”的起源,以及历史上首个类似于机器人的装置(称为自动机)。之后,重要的是让学生注意到当前用于机器人原型设计的技术(例如,可用于进行教育机器人活动的硬件)。最后,有必要教授机器人商业产品以及面向人们使用的新技术发展,始终引导学生思考未来的发展方向。
表2 “机器人与社会”学科的主题领域
| 主题内容:机器人学与社会 | G1组 | G2组 | G3组 |
|---|---|---|---|
| 布鲁姆层次 | |||
| 1.‐ 机器人学的历史 | |||
| 1.1 历史上的重要事件。机器人术语的介绍。 | 1 | 2 | 3 |
| 1.2 历史上的重要事件。机器人三定律。 | |||
| 1.3 机器人技术发展中的重要学科:机械, 电子,编程,控制工程。 | |||
| 1.4 机器人在社会中的作用。 | |||
| 1.5 机器人学的时间线。 | |||
| 2.‐ 自动机 | |||
| 2.1 自动机的定义 | 2 | 3 | 4 |
| 2.2 历史上自动机的发展。 | |||
| 2.3 自动机历史的代表人物:亚历山大的赫伦 和列奥纳多·达·芬奇。 | |||
| 3.‐ 教育机器人硬件 | |||
| 3.1 教育机器人套件:特点、优点和缺点。 | 2 | 3 | 4 |
| 3.2 教育机器人套件示例:Lego、FischerTechnik、Vex等。 | |||
| 3.3 开源硬件:定义、特点、优点和缺点。 | |||
| 3.4 处理器:定义、特点、类型、优点、缺点。 | |||
| 4.‐ 机器人新闻 | |||
| 4.1 服务机器人和自动化。 | 1 | 3 | 5 |
| 4.1.1 服务机器人技术的定义 | |||
| 4.1.2 技术服务:安全、优势与通信。 | |||
| 4.1.3 服务机器人的主要组成部分 | |||
| 4.2 关于机器人开发的新闻 | 1 | 3 | 4 |
| 4.2.1 健康支持机器人:护理机器人,假肢机器人 | |||
| 4.2.2 仿生机器人:协作行为 | |||
| 5.‐ 机器人创新与研究项目 | |||
| 5.1 谷歌机器人项目:谷歌汽车、波士顿动力及其他项目。 | 1 | 3 | 5 |
| 5.2 本田研究项目:阿西莫机器人。 | |||
| 5.3 机器人领域主要研究人员 |
4.2 机械
机械是任何机器人技术发展的基础组成部分之一。实际上,机器人可以被视为一种多功能的机械装置。因此,在教育机器人领域,机器人的机械部分成为一个重要的研究领域,有助于理解设计原理以及各种机械装置的运行方式,这些原理和装置可用于机器人的原型制作与开发。
本学科所定义的内容以及为每个小组设定的学习水平见表3。内容分为八个主题:项目与构建、设计与建模、专用教育机器人套件、机械装置、齿轮、齿轮‐ 曲柄、滑轮和简单机械。主要目标是向学生提供机器人设计、建模和构建的基本知识。随后,学生必须学习一种特定工具,通常以教育机器人套件的形式呈现。关于该套件的知识必须包含所有部件,以便学生能够构建原型。此外,如果套件包含类似于CAD系统的工具,则也应将其纳入主题内容中。最后,学生必须学习简单机械装置和机械,这些知识将使他们具备设计和构建特定类型机器人(如轮式、行走式或飞行式机器人)所需的技能;或者构建具有特定用途的机器人,例如操作物体、清洁、收获等。
表3 学科“机械学”的主题领域
| 主题内容:机械学 | G1 | G2 | G3 |
|---|---|---|---|
| 6. 项目与构造 | |||
| 6.1. 根据机器人工作环境的机器人分类学。 | 3 | 4 | 5 |
| 6.2. 移动机器人:定义,根据运动方式分类的机器人类型。 | |||
| 6.3. 操作机器人:定义,关节,连杆,自由度。 | |||
| 6.4. 设计与对称性:定义与重要性,机器人学中的应用 | 2 | 3 | 5 |
| 7. 设计与建模 | |||
| 7.1. 通过使用二维原型设计工具实现设计理念的演进 | 2 | 3 | 4 |
| 7.2. 材料与结构 | 2 | 4 | 5 |
| 7.3. 建筑材料:回收利用,补充材料。 | |||
| 7.4. 结构特性:定义,类型和特性。 | |||
| 7.5. 三角结构。 | |||
| 8. 特定教育机器人套件 | |||
| 8.1. 主要特点。 | 2 | 3 | 4 |
| 8.2. 部件识别。 | |||
| 8.3. 使用该套件进行的研究。 | |||
| 9. 机构 | |||
| 9.1. 轴和轮子。 | 2 | 4 | 5 |
| 9.2. 轮子:定义,根据应用分类。 | |||
| 9.3. 轴:定义,与轮子联动的运行。 | |||
| 10. 齿轮 | |||
| 10.1. 定义 | 2 | 4 | 5 |
| 10.2. 运行的角色。 | |||
| 10.3. 运动传递原理。 | |||
| 10.4. 齿轮齿条:齿条定义,小齿轮定义,运动传递。 | |||
| 10.5. 使用齿轮的机器。 | |||
| 11.‐ 齿轮‐曲柄 | |||
| 11.1. 机构的特征:齿轮定义,曲柄定义 | 2 | 4 | 5 |
| 11.2 机构操作:从圆周运动到直线运动的转换。 | |||
| 12.‐ 滑轮 | |||
| 12.1. 定义,机构的工作原理。 | 2 | 4 | 5 |
| 12.2. 运动传递原理。 | |||
| 12.3. 双滑轮:用于运输重物的优点。 | |||
| 13.‐ 简单机械 | |||
| 13.1. 杠杆:定义。 | 3 | 4 | 5 |
| 13.2. 一级杠杆:作用在一级杠杆上的力。应用。 | |||
| 13.3. 二级杠杆:作用在二级杠杆上的力。应用。 | |||
| 13.4. 三级杠杆:作用在三级杠杆上的力。应用。 | |||
| 13.5. 杠杆臂。 | |||
| 13.6. 斜面:定义。 | |||
| 13.7. 物体在斜面上的作用力。 | |||
| 13.8 由斜面衍生的机械:楔子和螺钉。 | |||
| 13.9 机动机械:带电动机的机构。 | |||
| 13.10. 设计与建造 |
4.3 电子
与机械领域同样重要,电子是机器人开发的基本领域之一。如今,电是机器人的主要动力来源,也是感知、发送和处理来自/前往各种传感器和机器人执行器信号的基础要素。
本学科定义的内容如表4所示。内容分为两个主题:传感器和执行器。我们注意到,信号处理(在电子层面)未被包含在内,因为与该领域相关的主要知识已涵盖在编程和控制理论部分中。因此,在本学科学习中,学生应学习信号的表示方式,以及传感器如何从现实世界中采集数据并将其传输给处理器,以便进行后续处理。
表4 学科“电子学”的主题领域
| 主题内容:电子学 | G1 | G2 | G3 |
|---|---|---|---|
| 14. 传感器 | |||
| 14.1. 感知 | |||
| 14.1.1 感知的定义。 | 3 | 4 | 5 |
| 14.1.2. 人类感知:感官。 | |||
| 14.1.3. 机器人感知:传感器。 | |||
| 14.2. 声音传感器 | |||
| 14.2.1 声音特性。 | 2 | 4 | 5 |
| 14.2.2. 距离传感器,传感器特性。 | |||
| 14.2.3. 声音传感器,传感器特性。 | |||
| 14.3. 基于光的传感器 | |||
| 14.3.1 光的性质。 | 2 | 4 | 5 |
| 14.3.2. 光传感器,传感器属性。 | |||
| 14.3.3. 颜色传感器,传感器属性。 | |||
| 15. 执行器 | |||
| 15.1. 运动和动作 | |||
| 15.1.1 运动的定义 | 2 | 4 | 5 |
| 5.1.2. 动作定义 | |||
| 15.1.3. 生物动作和运动的复现 | |||
| 15.1.4. 执行器:定义 ,何时以及如何使用它。 | |||
| 15.2. 电机和伺服电机 | |||
| 15.2.1 电流的定义。 | 2 | 4 | 5 |
| 15.2.2. 发动机的定义。 | |||
| 15.2.3. 扭矩定义。 | |||
| 15.2.4. 发动机类型。 | |||
| 15.2.5. 旋转方向和速度。 | |||
| 15.2.6. 发动机类型。 | |||
| 15.3. 显示和声音 | |||
| 15.3.1 可视化和信息收集。 | 2 | 4 | 5 |
4.4 编程
计算机也是构成机器人技术基础的最重要领域之一(如果不是最重要的)。在机器人技术教学中,机器人编程是计算机的实际应用。它包括为在机器人上运行而设计、编写、测试和维护计算机程序的源代码的处理过程。由于机器人是由计算机控制的机电一体化多功能设备,它们本身也可被视为计算机系统,因此所有计算机编程技术都可以直接应用于机器人编程。
本学科定义的内容见表5。内容分为两个主题内容:编程方面,以及编程技术。在首先,向学生教授编程基础非常重要。这意味着要理解什么是算法以及如何使用流程控制语句。在此之后,教授数据类型、变量、命题逻辑和操作符使用等基本概念也很重要。接下来,教授向量和矩阵的概念及其在实现和使用函数中的应用也至关重要。此外,在机器人编程中(特别是针对儿童),实际上存在多种工具,其中大多数基于模块化编程概念,例如 Blockly (https://github.com/google/blockly)或 Bipes( http://www.bipes.net.br/),甚至还有基于文本的编程 (http://www.natalnet.br/weduc)。因此,教授两种编程风格(基于模块和基于文本)非常重要。最后,如果指导者认为有必要,学生还可以学习不同的编程范式。
学习编程基础之后,学生应根据水平学习计算机领域的特定主题,例如排序算法、图、元启发式算法、人工智能等。指导者可根据应用情况选择高级主题,
表5 学科“编程”的主题领域
| 主题内容:编程 | G1 | G2 | G3 |
|---|---|---|---|
| 16. 编程方面 | |||
| 16.1. 算法 | |||
| 16.1.1 算法定义 | 2 | 3 | 4 |
| 16.1.2. 算法一词的历史。 | |||
| 16.1.3. 算法设计:流程图、伪代码。 | |||
| 16.2. 流程控制语句 | |||
| 16.2.1. 条件语句。 | 1 | 2 | 3 |
| 16.2.2. 循环语句。 | |||
| 16.3. 基本方面 | |||
| 16.3.1 数据类型 | 1 | 2 | 3 |
| 16.3.2. 变量 | |||
| 16.3.3. 命题逻辑 | |||
| 16.3.4. 操作符 | |||
| 16.4. 高级方面 | |||
| 16.4.1 矩阵 | 1 | 2 | 3 |
| 16.4.2 函数 | |||
| 16.5. 模块化编程 | |||
| 16.5.1 伪代码 | 2 | 3 | 4 |
| 16.5.2 机器人编程平台介绍 | |||
| 16.5.3 离线与在线编程环境 | |||
| 16.5.4 虚拟环境 | |||
| 16.6. 文本编程 | |||
| 16.6.1 从伪代码到文本编程 | 1 | 2 | 3 |
| 16.6.2 编译与错误修正 | |||
| 17. 编程技术 | |||
| 17.1. 高级算法 | |||
| 17.1.1 图 | 1 | 3 | 4 |
| 17.1.2 有限状态机。 | |||
| 17.1.3 元启发式算法 |
4.5 控制
由于编程学科仅旨在教授机器人编程的基础知识,因此有必要教会学生如何将编程与机器人的机电部件。这意味着教授如何获取、处理和融合传感器数据以确定环境状态非常重要。此外,所获取的数据应转化为有用信息,并映射为决策和控制动作,以驱动机器人执行器,使机器人能够根据特定情况和需求采取行动。这些必要性取决于机器人的任务。
表6 学科“控制”的主题领域
| 主题内容:控制 | G1 | G2 | G3 |
|---|---|---|---|
| 18. 导航 | |||
| 18.1. 动态 | |||
| 18.1.1. 运动方向和速度 | 1 | 2 | 3 |
| 18.1.2. 移动动态 | |||
| 18.2. 位置 | |||
| 18.2.1. 我在哪里? | 2 | 3 | 4 |
| 18.2.2. 方向 | |||
| 18.2.3. 位移。 | |||
| 18.3. 探索 | |||
| 18.3.1. 如何达到我的目标, | 2 | 3 | 4 |
| 18.3.2. 避免碰撞。 | |||
| 18.3.2. 线速度和角速度。 | |||
| 19. 遥操作 | |||
| 19.1. 遥控机器人 | |||
| 19.1.1. 遥控系统定义。 | 2 | 3 | 4 |
| 19.1.2. 主从定义。 | |||
| 19.1.3. 接口定义 | |||
| 19.1.4. 操作员定义 | |||
| 19.1.5. 蓝牙技术 | |||
| 20. 基于反馈的控制 | |||
| 20.1. PID控制 | |||
| 20.1.1. 比例控制 | 1 | 2 | 3 |
| 20.1.2. 比例‐微分控制 | |||
| ## 5 在学校应用EDUROSC‐儿童的方法论 |
在考虑教育机器人时,研究人员和实践者通过开展项目来支持他们的方法。在这方面,已经提出了许多用于开发机器人项目的方案。其中大部分方案都是为教授STEAM学科而设计的。例如,Kopcha等人[27]提出了一种为机器人教育开发STEAM课程的方法。然而,如上所述,机器人教育是一种可用于学习多种概念的工具,包括STEAM和非STEAM领域的概念,正如 Bennitti[6]所解释的那样。最后,机器人技术是一门可以作为主要重点来教授的学科,同时将其他学科作为辅助。因此,有必要拥有教育机器人两种范式以及STEAM和非STEAM两类学科的教学方法论指导。
在这方面,我们提出了一种包含方法论指导的处理过程,以通过项目开发的方式实施教育机器人技术的机器人课程。该方法具有通用性,可适用于任何课程。然而,本文采用EDUROSC‐KIDS标准课程[34]。在教育机器人领域,以项目方式进行教学已在社区中广泛传播,同时该领域最重要的竞赛也采用这一策略[25, 26, 29, 30, 44]。
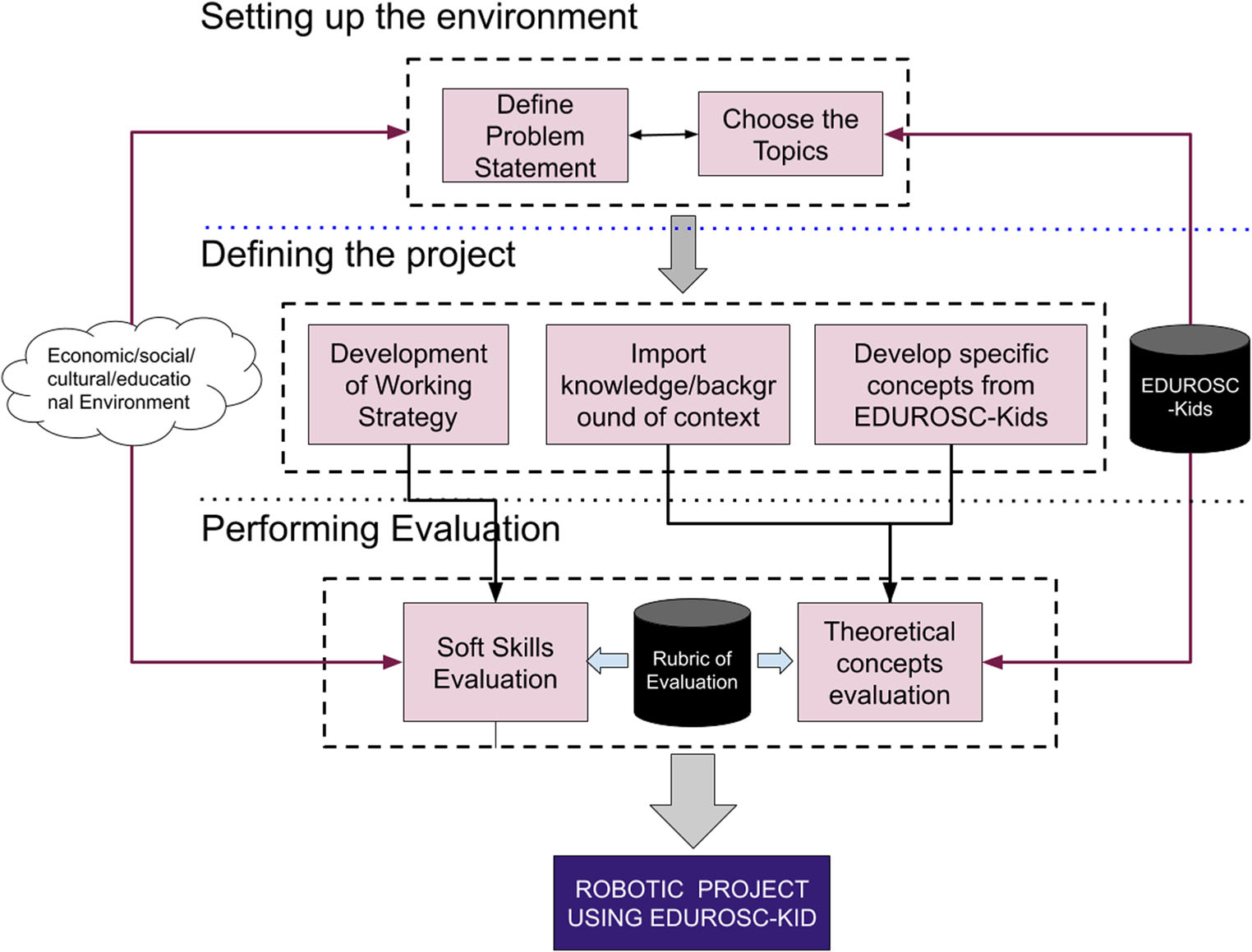
该方法基本分为三个阶段:(1)搭建环境,需要考虑社会经济、文化及教育变量,以及所使用的教育机器人课程中包含的主题(例如 EDUROSC‐儿童);(2)定义项目,在此阶段规划并开发项目组件;以及(3)进行评估,用于衡量项目的成功程度和学习成果。
对于每个将机器人技术应用于不同主题教学的项目,本研究建议使用我们的方法论,因为它支持一个学习计划,并且不依赖于特定的硬件或软件。因此,教师需要认识所处环境,了解学生情况,并明确要达成的目标。之后,课程需要像Edurosc‐kids这样的学习计划来指导主题教学。评估非常重要,因为这一过程是迭代的,旨在不断改善学生的学习体验。
5.1 搭建环境
众所周知,如果学生理解了获取知识的重要性,他们就会有动力不断学习。佩亚在解释数学应用时提出了这一观点[39],他认为学生可以将他们的世界视为一个数学世界。这一观点同样适用于机器人技术领域,学生可以在每一项日常人类活动中看到机器人技术的潜在应用。
理解环境是学习并构建针对其中问题的解决方案的机会。这些问题及其成因也为寻找潜在解决方案[46]提供了机会。因此,当规划一个新机器人项目时,设计者需明确目标,而对环境的了解有助于实现该目标。此外,设计者还需决定是否采用教育机器人来借助机器人学习某一知识领域,或是通过融合其他领域的知识来学习机器人技术。这意味着设计者需要确定机器人技术将是主要重点还是次要重点。这是在考虑环境本身时需要设定的第一个变量。同时,接下来定义的一系列行动也必须在初始阶段完成。
5.1.1 定义问题陈述
为了定义该项目,必须明确需要通过该项目解决的问题,因为项目并非可以正常存在。从这个意义上说,需要回答以下三个关于儿童环境的问题:
– 儿童在其社区中的文化、社会、经济和教育状况方面的环境如何?
– 他们环境中需要解决的主要经济/社会/文化/教育方面的缺点是什么?
– 儿童在项目中发展所需的知识和资源方面的先决条件是什么?
前面问题的答案将帮助设计者思考哪种项目最适合儿童。此外,设计者还必须考虑能够激励大多数学生的项目,同时主要目标是通过机器人技术来发展科学基本概念(及其他学科)以及软技能。
5.1.2 选择主题
在考虑定义问题陈述的问题答案时,需要根据定义学生环境的变量来确定学生必须了解的机器人技术主题。如上所述,EDUROSC‐儿童将特定主题分组为五个学科(图2),并建议每个主题应达到的学习水平。在此步骤中,设计者必须明确说明:
– 需要多少节课才能达到理想的学习水平?
– 他可以使用哪些沟通工具来促进教学过程?
– 他还可以使用哪些其他工具来促进软技能的发展?
如上所述,教育机器人的主要优势在于将技术作为发展知识和软技能的工具,并具有特定的实施方案。然而,机器人项目还必须有助于加深学生对在学校所学理论概念的理解,并认识这些概念的应用。此外,让学生理解在自身环境中应用机器人技术的好处也非常重要。
5.2 定义项目
这是儿童机器人项目开发的第二阶段。在搭建好环境后,将对项目进行规划和实施。我们建议按以下三个步骤完成此阶段。
5.2.1 制定工作策略
教育机器人是一种教授工程等不同内容的强大工具[6],计算思维[4]以及其他特定概念。它可以激发解决问题、创造力和协作等不同技能[20]。在此步骤中,设计者应定义:
– 教学方法,例如,设计者可以选择基于项目的学习,如Kara‐hoca[25]所示,或选择其他敏捷方法。
– 定义课程时间安排,包括课次数量、每次课次所需花费的时间以及其时间表。
– 考虑儿童的特定才能、先前知识和偏好的工作策略。
5.2.2 导入情境中的知识与背景知识
儿童具备一定的先验知识,并且需要掌握与不同主题相关的知识,这些知识不仅限于机器人技术,还可能影响项目的开展。必须明确这些知识,并制定使用和提升这些知识的策略。所选主题应根据其与项目的相关性以及学生所需的知识水平进行分类。
5.2.3 从课程中发展特定的理论概念
在问题陈述的定义阶段,选择了一组主题纳入项目。然而,在此阶段,根据项目的规划来优化选择非常重要。这可以帮助设计者纳入新主题,或剔除那些考虑到时间、项目必要性以及学生先前知识后不太相关的主题。
5.3 进行评估
使用机器人项目被公认为是培养学生不同技能的有力工具。事实上,我们已经为基于竞赛的教育机器人项目引入了一套评分标准[40]。该评分标准非常适合应用于本方法中,因为它基于利用机器人项目来发展学生的知识和技能。然而,必须从以下两个主要方面对其进行评估。
5.3.1 软技能评估
它对应评分标准中的第三个评估准则,用于评估统一性和团队方面。其中包括四个变量,具体描述如下:
– 变量1:通信:从有效性和一致性方面进行考量。考察学生是否提出问题、提出建议、正确回答问题并解释其答案。
– 变量2:团队合作:从项目中为每个团队成员定义具体角色以及团队成员之间的相互支持方面进行考量。
– 变量3:创造力‐伦理‐责任:从解决方案的独特性和创造性设计方面进行考量。同时,需确保机器人及学生行为无任何不道德之处,避免对他人造成伤害。
– 变量4:STEAM主题整合:从机器人技术项目与讲师希望探讨的学科领域之间的关联性,以及是否涉及科学、技术、工程、艺术和数学相关的其他主题方面进行考量。同时需要注意,该变量也可应用于非STEAM主题。
5.3.2 理论概念评估
对应评分标准中的第一和第二项标准,这些标准与设计、设计过程以及搭建与编程相关。此外,该评估还可以考虑针对非机器人主题的其他具体评估标准。建议教师参照评分标准中提出的内容来设计具体的评估标准。在设计与设计过程方面,定义了以下四个变量:
– 变量1:挑战可行解决方案的创建:针对提出多种解决方案,并使用相关标准选择最佳方案。
– 变量2:简单与复杂机构及系统:针对学生所使用的简单和复杂机械装置的数量。
– 变量3:设计流程与文档:针对是否具有结构化的设计处理过程开发以及证据的汇编。
– 变量4:资源使用:指正确识别项目中所需资源的能力。
并且,在搭建与编程的情况下,定义了接下来的四个变量:
– 变量1:机械系统:指所设计的机械系统在构造质量方面的表现。
– 变量2:控制系统:关于原型控制系统正确开发。
– 变量3:电气与电子系统:关于连接质量及电气与电子元件的使用。
– 变量4:编程:关于为原型开发的计算机程序的质量。
6 EDUROSC‐儿童实验与验证
为了验证本文所提方法的适用性,我们进行了多项实验。基本上,阿雷基帕圣保禄天主教大学机器人俱乐部(UCSP机器人俱乐部)被用作实验平台,此外, EDUROSC‐儿童后来还被调整用于在巴西东北部培训教师。我们的俱乐部面向想学习机器人且年龄在6至18岁的儿童。每年俱乐部开设两个周期:夏季周期和年度周期。夏季周期为短期课程(一月),通常持续 48小时,包含8 ‐ 12次课程。表7展示了自2018年以来暑期俱乐部的详细信息,并列出了我们用于教授机器人的特殊主题。
为了验证这一方法,我们介绍了两个主要案例:
– 案例1:2020年暑期俱乐部:本案例介绍了与6‐18岁儿童的经验。我们的机器人课程根据K‐12分为三个小组:38名6‐9岁儿童、38名10‐13岁儿童和15名14‐18岁儿童。
– 案例2:2020年度俱乐部:本案例说明了我们开展虚拟课程的经验,因为该活动发生在2020年9月至11月。在下文中,我们描述了项目以及疫情期间俱乐部的虚拟化。
6.1 案例1:暑期俱乐部机器人技术
俱乐部根据K‐12划分为三个小组:(1)G1组,包含 6‐9岁的儿童;(2)G2组,包含10‐13岁的儿童;(3)G3组,包含14‐18岁的儿童。在机器人项目中,第一步是确定教育机器人的角色。它可以作为教授某些概念的工具,或作为项目的重点(即以教授机器人技术为核心)。俱乐部提出的机器人项目以机器人为核心,并根据环境设定特定主题。此外,作为示例,图 4展示了2020年UCSP机器人俱乐部暑期课程的广告。
本文档中介绍的方法论已用于规划每次UCSP机器人俱乐部课程的内容。为了更好地理解这一点,我们将在下文根据EDUROSC‐儿童的指导方针,逐步说明如何规划该课程。
UCSP机器人俱乐部为儿童和教育工作者提供了多门课程。在此,我们展示了使用EDUROSC‐儿童为 G1组(6‐9岁)儿童准备短期课程内容的方法。该过程包括三个阶段:搭建环境、定义项目和进行评估(评分标准),如下所述。
6.1.1 搭建环境
环境定义了机器人技术项目的范围。从这个意义上说,规划需要分两个步骤进行:
一个定义问题陈述:这一切都与环境有关。因此,以下三个关于儿童环境的问题在此得到解答:
– 定义儿童所处的环境:儿童年龄为6‐9岁。他们的社会经济地位相似。100%的儿童生活在阿雷基帕‐秘鲁。阿雷基帕是一个将40%土地面积用于农业的城市。在阿雷基帕,农业中使用的技术较少。
– 确定其环境中需要解决的主要(经济/社会/文化/教育)缺点:农业未使用技术。土地所有者雇佣人员进行播种和其他活动。因此,生产成本上升,且生产依赖于劳动力。
– 定义儿童开展项目所需具备的知识先决条件以及资源。儿童了解市场产品以及其中哪些产品是在阿雷基帕生产的。关于其他概念,他们可以阅读并理解不同的文本。
B 选择主题:根据环境,最终项目旨在设计一款用于农业的机器人。该机器人可协助播种。收集了多种技术以展示不同的技术。选择EDUROSC‐儿童的主题来开发原型,以应对这一挑战。为此,需回答以下问题:
– 需要多少节课才能达到理想的学习水平?这是一门短期课程,由8节课组成。此外,儿童有18个传统课堂教学,他们需要18个小时来补充他们的培养。
– 他可以使用哪些沟通工具来开展教学过程?每次机器人课程为两个半小时。第一次课次时,儿童需要相互认识,因此在整个课程中,他们将以小组形式进行活动,并安排互动游戏、口头展示等活动。
– 他还可以使用哪些工具来促进软技能的发展?为了实现这一目标,向所有人展示了行为规范。这些规范旨在进行组织课次并以相同方式激励所有学生的参与。小组在教室内进行组织,每个成员都有特定的角色(例如管理者、后勤、建造者和观察者),并且每次课次都必须更换角色。
6.1.2 定义项目
该项目涉及能够帮助耕作土地的农业机器人。这种方法将分为三个步骤进行:
制定工作策略:该项目需要对种子、土壤、摩擦的等各种事物进行实验。考虑到这些变量,有必要明确方法论和内容。在教学方法方面,该项目将采用黄金PBL[22]进行开发。课程的时间表如表8所示。根据该时间表,选择了EDUROSC‐儿童的特定主题领域来设计挑战。表9展示了为学习该主题而选择的编程学科的主题领域。
B 导入知识与背景情境:所选主题根据其与项目的相关性以及所需的知识水平进行分类
C 从课程中开发特定的理论概念:选择了一组主题纳入项目中,并根据项目的规划对这些主题进行了细化。
6.1.3 执行评估
为了分析儿童的理解和学习情况,使用了基于竞赛的项目中教育机器人评分标准的变量[40]。图10、11、12和13展示了2020年暑期周期4名学生在编程学科以及以传感器为主题的控制语句和电子方面的学习进展作为EDUROSC‐儿童中的主题领域。在这种情况下,儿童进行了三次编程课程:总体时间表中的第3、5和7课次,内容见表9。每次课次结束后,应用评分标准,图10至13展示了学习进展。
6.2 案例2:UCSP虚拟机器人俱乐部
这里描述的第二次实验是在新冠肺炎疫情迫使全球一切活动转为网络虚拟形式时出现的。为了继续开展学习,UCSP俱乐部决定以机器人课程的形式继续与儿童进行机器人学习。本节介绍了在相同方法论基础上应用该机器人学习方式的情况。
虚拟机器人俱乐部是一门分为12次课程的课程。本案例中定义了两个组(G1:6‐9岁和G2:10‐13岁)。尽管环境明显受到疫情的影响,但让儿童保持平静与安宁是一个非常重要的问题。在这方面,向他们传递的主要信息是展望未来,以及技术如何在疫情期间及之后帮助改善生活。
表10展示了EDUROSC‐KIDS中机器人与社会学科的虚拟课程时间表。此外,该表还定义了每个内容所计划的课程次数以及评估类型它以及所需花费的时间(图5)。虚拟课程中使用的工具是Google Meet和Nearpod。每次课次都旨在讲解 EDUROSC‐儿童所规定的特定内容。评估通过使用我们的评分标准[40]进行。图6展示了所使用的两个变量:(1)设计中的简单与复杂机构及系统;以及(2)机器人与社会学科中的设计过程。
关于机械学科,表11展示了虚拟课程的内容,包括课次、评估类型以及时间。为了开展虚拟教育,机械学科的课次使用了可回收材料并结合模拟进行。图 5用照片展示了部分儿童的实验。
关于电子学科,表12定义了课程内容。但由于第 4和第5课次的内容在EDUROSC‐儿童的G1组中已隐含在“14. 传感器”和“15. 执行器”等主题中,因此未单独列出。它们已被包含在项目的第一个开发阶段:环境搭建。表13和14展示了最后几节课的内容。
所有为EDUROSC‐儿童选择的主题都帮助我们指导项目。从这个意义上讲,我们解释了在特定项目中,建立环境非常重要以及变量,之后我们需要确定教学策略。这一过程是迭代的,以改善学习并提高结果。
两次课后对机械、电子和编程主题的评估具体成绩如图7、8和9所示。
7 结果与讨论
为了应用我们的方案,针对每个实验,我们选择了 EDUROSC‐儿童的具体内容来组织教学主题。随后,根据所提出的方法论,安排了教学处理过程。本文描述了两次实践:案例1 ‐ 暑期俱乐部;以及案例2:虚拟俱乐部。
在此方法论中,解释了三个主要步骤:1)搭建环境;2)定义项目;以及 3)进行评估。在我们所阐述的所有实践中,都明确指出了环境的细节,这对于机器人项目的规划至关重要。
关于第一种情况的第一步,这些儿童生活在阿雷基帕‐秘鲁,他们共享许多文化、传统以及他们环境中的特定事物。在第二种情况下,环境也非常重要。在这种情况下,课程是虚拟的,每个人都在某个特定时刻经历了疫情。在这两种情况下,我们都选择了一个实际问题,如健康或农业。之后,主题根据EDUROSC‐儿童的学习计划确定并展开。
关于第二步,教师们开发了指导材料来规划我们的课程,工作策略基于问题解决法。在其他情况下,可以使用其他策略,如试错法或探索式学习法。郑等人[24]在许多提案中解释了其他策略,然而,对于所有这些策略而言定义和设置环境及其变量是非常重要的。
关于第三步,我们评估了我们的经验,并展示了儿童在机器人技术不同主题(如机械和编程)上的学习进展。我们采用了Rodriguez等人提出的评估方法。[40]通过该评估方法,我们可以比较小组协作及其他软技能等特征。Jung提出了七个因素来涵盖儿童机器人学习,我们已将这七个因素全部纳入。图10、11、12和13展示了在学习计划中某一特定主题的学习进展,该主题结合了一个实际问题,可能是农业(案例1)或健康(案例2)。
8 结论
本文提出了一种应用标准(EDUROSC‐Kids)课程开展项目的方法论。该建议的方法论具有通用性,可适用于任何教育机器人课程。此外,文中还介绍了使用该流程的多个实践案例,包括应用EDUROSC‐Kids课程的案例[34]基于Rodriguez‐Siu 等人提出的评分标准[40]。
这项工作带来了宝贵的贡献,主要的实践成果是:在教育机器人技术的两个范式中(教授机器人技术本身的内容以及利用机器人技术教授其他学科),都可以对教学过程进行形式化处理。在这种情况下,这篇论文提出了一种形式化方法,既可用于以机器人技术为主要重点进行教授,也可用于以机器人技术为工具教授其他主题,即以机器人技术为次要重点进行教学。
我们注意到,教育机器人领域存在多种方法。然而,其中大部分方法都与新的硬件方法以及特定硬件的使用相关。另一方面,本文提出的方法更具普遍性,可适用于任何课程、硬件和评估量规。这包括本科和研究生层次的机器人技术课程,以及工业4.0的培训课程等。该提议的方法结合EDUROSC‐Kids课程和评估量规,具有广泛的应用前景。
通用工具的示例,足以应用于在线教育、传统课堂教学以及培训课程中。因此,本文对这些工具的更好形式化也是对机器人学界的一项贡献。我们注意到,这些工具既可用于特定硬件,也可用于模拟环境,例如我们的下一个目标 sBotics( https://weduc.natalnet.br/sbotics/)[13],。最后一个工具已被应用于巴西机器人奥林匹克竞赛,目前下载量已超过1.8万次。这两种工具可以结合使用,以更广泛地在全球推广机器人技术,而无需依赖硬件。
如实验开头所述,此处报告的结果主要针对小学到高中的儿童和青少年,这在K‐12中可视为前两个阶段。然而,我们已在巴西开展并正在整理基于继续教育模式的教师培训实验。我们将在另一篇论文中报告这些内容,因为自本研究完成以来出现了若干新问题,我们需要对其进行更深入的研究。在这种情况下,贡献将主要集中在评估策略的调整上,该策略自那时起已经发生了变化。如前所述,这将是我们的首个未来工作方向。
为此,通过本研究的提议,我们能够在两种模式下进行学习:以机器人技术为主要焦点的范式或以机器人技术为次要焦点的范式。希望这种方法能够帮助教育机器人领域的教师和指导者成功实现其目标。最后,向教育机器人实践者提出一点建议:应遵循标准化流程进行项目规划和执行,以成功实现目标。同时提醒他们,这一建议适用于两种范式(将机器人技术作为教学工具或教授机器人技术)。

















 1952
1952

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









