







目录
前言
用FPGA实现SPI主机
一、SPI 特性
1.1同步
发送数据时钟+发送数据
1.2速率
I2C协议v2.1规定了100K,400K和3.4M三种速率(bps)。
具体到产品中SPI的速率为系统时钟频率的1/2。
1.3全双工
两根数据线
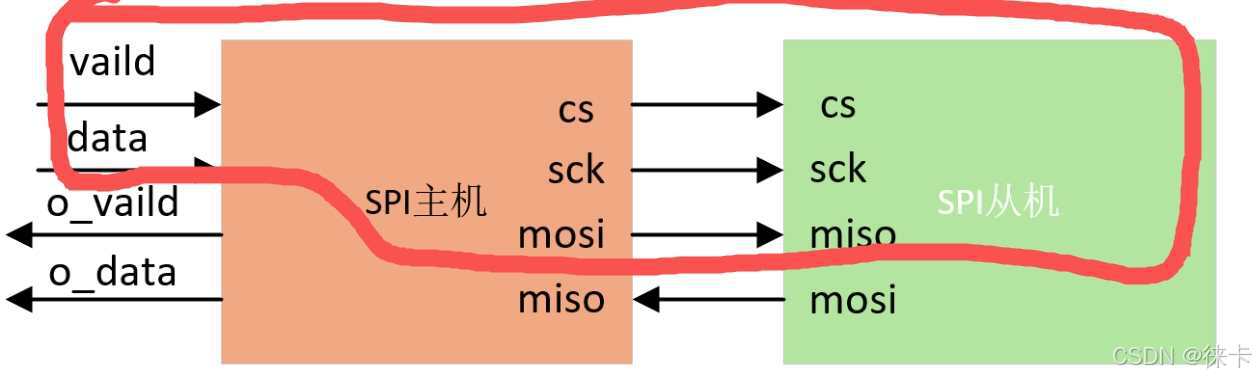
二、数据接口
2.1主从机连接
2.2传输模式
| MODE | CPLO | CPHL |
|---|---|---|
| 0 | 0 | 0 |
| 1 | 0 | 1 |
| 2 | 1 | 0 |
| 3 | 1 | 1 |
二、难点
2.1 难点1:SPI数据是在下降沿变化,上升沿保持
解决思路:对系统时钟产生二分频计数器,既可以指示spi_clk上升下降沿,又可以在spi_clk时钟下降沿改变数据,上升沿数据保持。
2.2 难点2:串并转换
思路:串转并移位寄存器往里填数,并转串移位移位寄存器往外溢数
always@(posedge i_clk)begin
if(i_rst)
ro_spi_mosi <= 'd0;
else if(w_user_active)
ro_spi_mosi <= i_user_data[cnt];//并转串
else
ro_spi_mosi <= ro_spi_mosi;
end
always@(posedge ro_spi_clk,posedge i_rst)begin
if(i_rst)
user_data <= 'd0;
else
user_data <= {user_read_data[6 : 0],i_spi_miso};//串转并
end
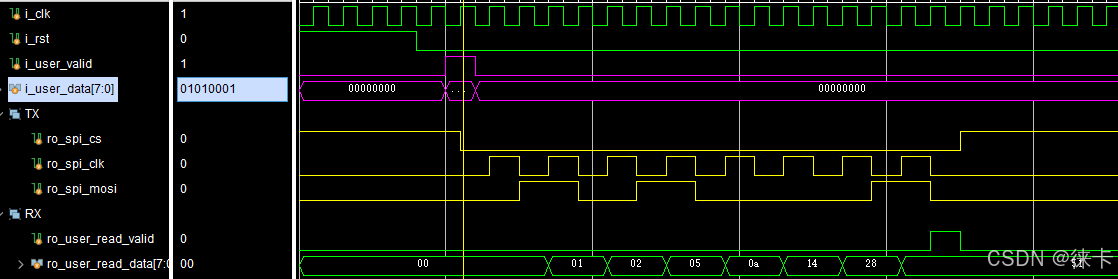
3 仿真
简单仿真验证一下逻辑,输出信号下降沿变化,对应从机就是上升沿读取数据,没啥问题,ok
备注
仅用于记录日常学习,侵权必究


















 2048
2048

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











