




目录
引言
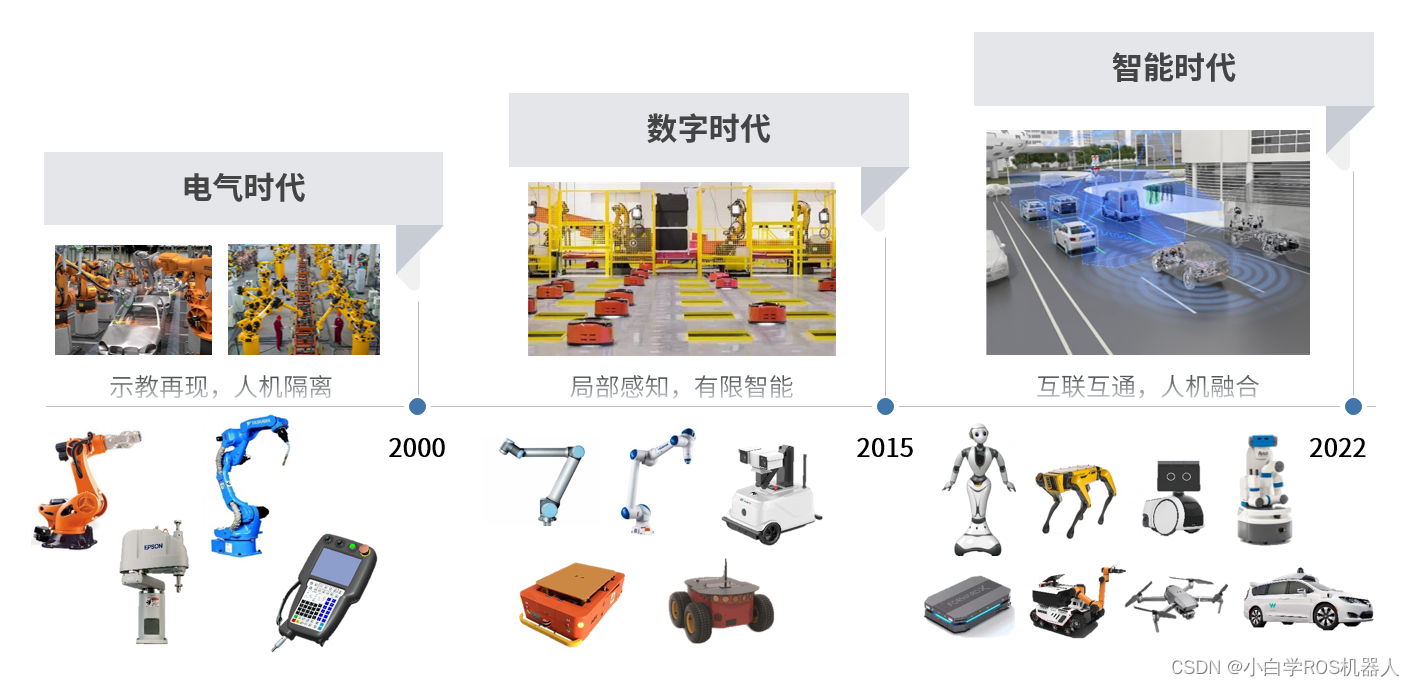
机器人的发展横跨七八十年,经历了三个重要时期。
-
2000年前,机器人主要应用于工业生产,俗称工业机器人,由示教器操控,帮助工厂释放劳动力,此时的机器人并没有太多智能而言,完全按照人类的命令执行动作,更加关注电气层面的驱动器、伺服电机、减速机、控制器等设备,这是机器人的电气时代。
-
2000年后,计算机和视觉技术逐渐应用,机器人的类型不断丰富,出现了AGV、视觉检测等应用,此时的机器人传感器更加丰富,但是依然缺少自主思考的过程,智能化有限,只能感知局部环境,这是机器人的数字时代,不过这也是机器人大时代的前夜。
-
2015年之后,随着人工智能技术的快速发展,机器人成为了AI技术的最佳载体,家庭服务机器人、送餐机器人、四足仿生机器狗、自动驾驶汽车等应用呈井喷状爆发,智能机器人时代正式拉开序幕。
智能机器人的快速发展,必将对机器人开发提出更高的要求,软件层面最为热点的技术之一就是机器人操作系统,这也是我们课程的主角——Robot Operating System。
智能时代,机器人正在向全场景的高度智能化方向进化,这对机器人开发提出了巨大挑战,机器人操作系统ROS应用而生。
那什么是ROS?什么又是ROS2呢?
接下来,我们就一起掀起ROS的神秘面纱,带领大家认识一下机器人开发中这位重量级的嘉宾。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6008
6008

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









