




目录
前言
话题通信可以实现多个ROS节点之间数据的单向传输,使用这种异步通信机制,发布者无法准确知道订阅者是否收到消息,本讲我们将一起学习ROS另外一种常用的通信方法——服务,可以实现类似你问我答的同步通信效果。
通信模型
在之前的课程中,我们通过一个节点驱动相机,发布图像话题,另外一个节点订阅图像话题,并实现对其中红色物体的识别,此时我们可以按照图像识别的频率,周期得到物体的位置。
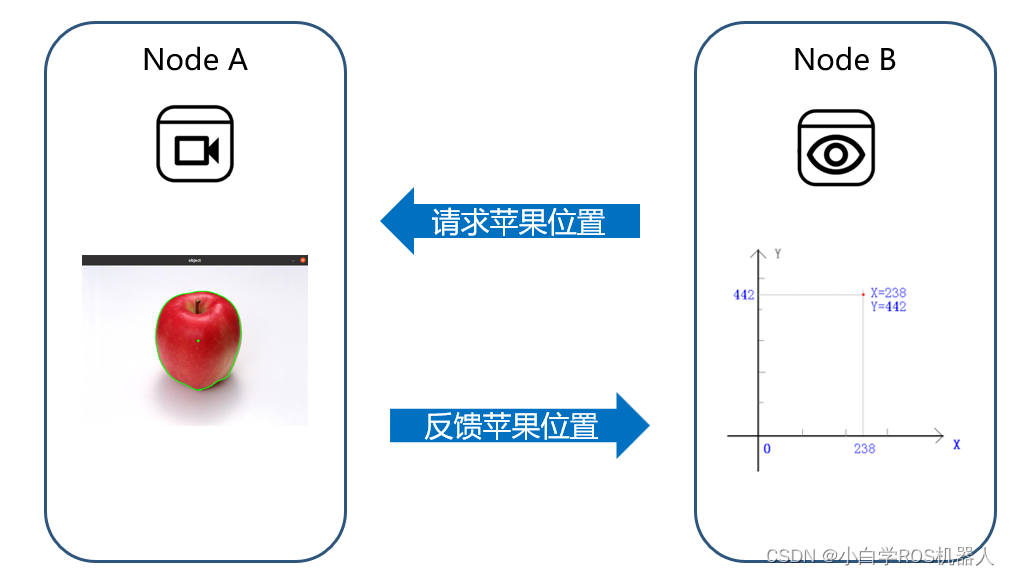
这个位置信息可以继续发给机器人的上层应用使用,比如可以跟随目标运动,或者运动到目标位置附近。此时,我们并不需要这么高的频率一直订阅物体的位置,而是更希望在需要这个数据的时候,发一个查询的请求,然后尽快得到此时目标的最新位置。
这样的通信模型和话题单向传输有所不同,变成了发送一个请求,反馈一个应答的形式,好像是你问我答一样,这种通信机制在ROS中成为服务,Service。
客户端/服务器模型
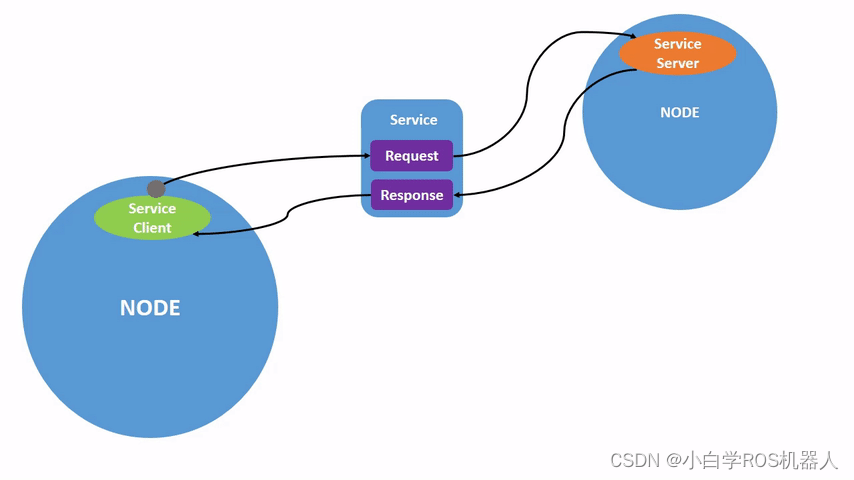
从服务的实现机制上来看,这种你问我答的形式叫做客户端/服务器模型,简称为CS模型,客户端在需要某些数据的时候,针对某个具体的服务,发送请求信息,服务器端收到请求之后,就会进行处理并反馈应答信息。
这种通信机制在生活中也很常见,比如我们经常浏览的各种网页,此时你的电脑浏览器就是客户端,通过域名或者各种操作,向网站服务器发送请求,服务器收到之后返回需要展现的页面数据。
同步通信
这个过程一般要求越快越好,假设服务器半天没有反应,你的浏览器一直转圈圈,那有可能是服务器宕机了,或者是网络不好,所以相比话题通信,在服务通信中,客户端可以通过接收到的应答信息,判断服务器端的状态,我们也称之为同步通信。
一对多通信
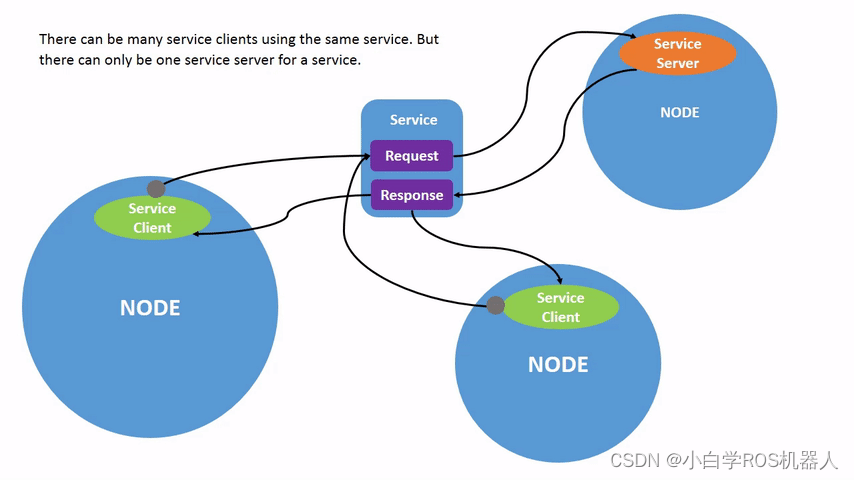
比如古月居这个网站,服务器是唯一存在的,并没有多个完全一样的古月居网站,但是可以访问古月居网站的客户端是不唯一的,大家每一个人都可以看到同样的界面。所以服务通信模型中,服务器端唯一,但客户端可以不唯一。
服务接口
和话题通信类似,服务通信的核心还是要传递数据,数据变成了两个部分,一个请求的数据,比如请求苹果位置的命令,还有一个反馈的数据,比如反馈苹果坐标位置的数据,这些数据和话题消息一样,在ROS中也是要标准定义的,话题使用.msg文件定义,服务使用的是.srv文件定义,后续我们会给大家介绍定义的方法。
案例一:加法求解器
大家现在对ROS服务通信应该有了基本了解,接下来我们就要开始编写代码啦。还是从一个相对简单的例程开始,也是ROS官方的一个例程,通过服务实现一个加法求解器的功能。

当我们需要计算两个加数的求和结果时,就通过客户端节点,将两个加数封装成请求数据,针对服务“add_two_ints”发送出去,提供这个服务的服务器端节点,收到请求数据后,开始进行加法计算,并将求和结果封装成应答数据,反馈给客户端,之后客户端就可以得到想要的结果啦。
运行效果
我们一起操作下这个例程,并且看下代码的实现原理。
启动两个终端,并运行如下节点,第一个节点是服务端,等待请求数据并提供求和功能,第二个节点是客户端,发送传入的两个加数并等待求和结果。
$ ros2 run learning_service service_adder_server
$ ros2 run learning_service service_adder_client 2 3


客户端代码解析
我们来看下客户端的实现方法。
程序实现
learning_service/service_adder_client.py
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
@作者: 古月居(www.guyuehome.com)
@说明: ROS2服务示例-发送两个加数,请求加法器计算
"""
import sys
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from learning_interface.srv import AddTwoInts # 自定义的服务接口
class adderClient(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.client = self.create_client(AddTwoInts, 'add_two_ints') # 创建服务客户端对象(服务接口类型,服务名)
while not self.client.wait_for_service(timeout_sec=1.0): # 循环等待服务器端成功启动
self.get_logger().info('service not available, waiting again...')
s 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1185
1185

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









