




目录
前言
在ROS系统中,无论话题还是服务,或者我们后续将要学习的动作,都会用到一个重要的概念——通信接口。
通信并不是一个人自言自语,而是两个甚至更多个人,你来我往的交流,交流的内容是什么呢?为了让大家都好理解,我们可以给传递的数据定义一个标准的结构,这就是通信接口。
接口的定义
接口的概念在各个领域随处可见,无论是硬件结构还是软件开发,都有广泛的应用。

比如生活中最为常见的插头和插座,两者必须匹配才能使用,电脑和手机上的USB接口也是,什么Micro-USB、TypeC等等,都是关于接口的具体定义。

软件开发中,接口的使用就更多了,比如我们在编写程序时,使用的函数和函数的输入输出也称之为接口,每一次调用函数的时候,就像是把主程序和调用函数通过这个接口连接到一起,系统才能正常工作。
更为形象的是图形化编程中使用的程序模块,每一个模块都有固定的结构和形状,只有两个模块相互匹配,才能在一起工作,这就很好的讲代码形象化了。
所以什么是接口,它是一种相互关系,只有彼此匹配,才能建立连接。
回到ROS的通信系统,它的主要目的就是传输数据,那就得让大家高效的建立连接,并且准确包装和解析传输的数据内容,话题、服务等机制也就诞生了,他们传输的数据,都要符合通信接口的标准定义。
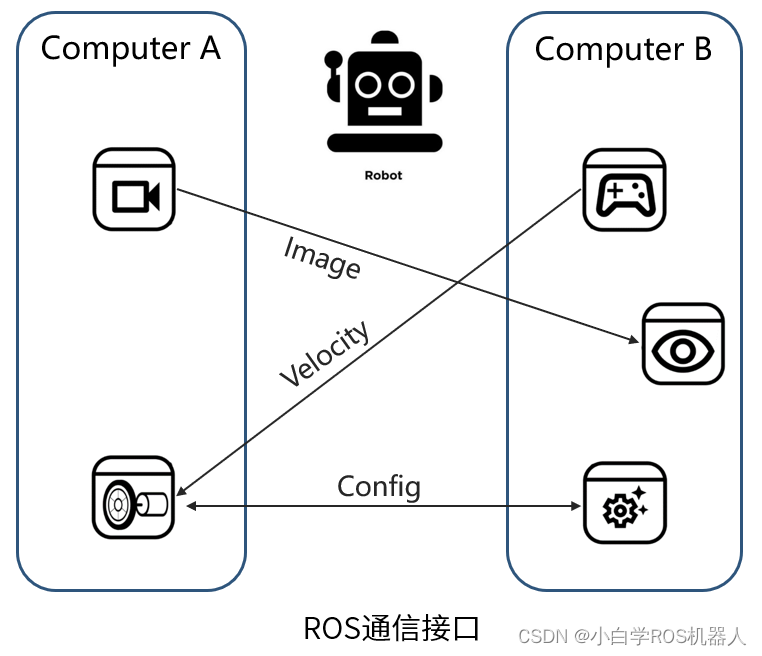
比如摄像头驱动发布的图像话题,由每个像素点的R、G、B三原色值组成,控制机器人运动的速度指令,由线速度和角速度组成,进行机器人配置的服务,有配置的参数和反馈的结果组成等等,类似这些常用的定义,在ROS系统中都有提供,我们也可以自己开发。
这些接口看上去像是给我们加了一些约束,但却是ROS系统的精髓所在。举个例子,我们使用相机驱动节点的时候,完全不用关注它是如何驱动相机的,只要一句话运行,我们就可以知道发布出来的图像数据是什么样的了,直接开始我们的应用开发;类似的,键盘控制我们也可以安装一个ROS包,如何实现的呢?不用关心,反正它发布出来的肯定是线速度和角速度。
ROS通信接口
接口可以让程序之间的依赖降低,便于我们使用别人的代码,也方便别人使用我们的代码,这就是ROS的核心目标,减少重复造轮子。
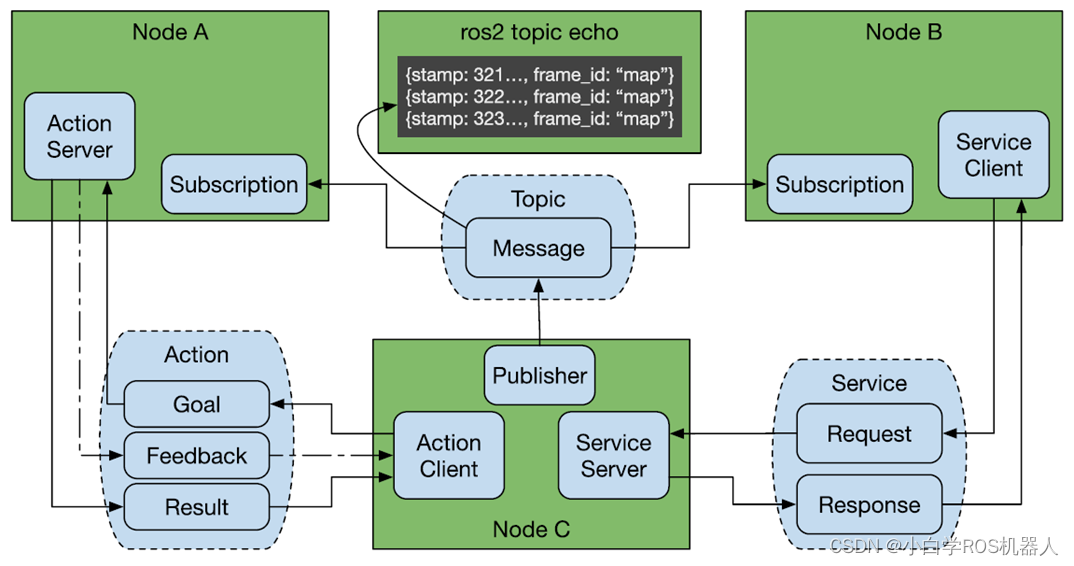
ROS有三种常用的通信机制,分别是话题、服务、动作,通过每一种通信种定义的接口,各种节点才能有机的联系到一起。
语言无关
为了保证每一个节点可以使用不同语言编程,ROS将这些接口的设计做成了和语言无关的,比如这里看到的int32表示32位的整型数,int64表示64位的整型数,bool表示布尔值,还可以定义数组、结构体,这些定义在编译过程中,会自动生成对应到C++、Python等语言里的数据结构

-
话题通信接口的定义使用的是.msg文件,由于是单向传输,只需要描述传输的每一帧数据是什么就行,比如在这个定义里,会传输两个32位的整型数,x、y,我们可以用来传输二维坐标的数值。
-
服务通信接口的定义使用的是.srv文件,包含请求和应答两部分定义,通过中间的“---”区分,比如之前我们学习的加法求和功能,请求数据是两个64位整型数a和b,应答是求和的结果sum。
-
动作是另外一种通信机制,用来描述机器人的一个运动过程,使用.action文件定义,比如我们让小海龟转90度,一边转一边周期反馈当前的状态,此时接口的定义分成了三个部分,分别是动作的目标,比如是开始运动,运动的结果,最终旋转的90度是否完成,还有一个周期反馈,比如每隔1s反馈一下当前转到第10度、20度还是30度了,让我们知道运动的进度。
标准接口
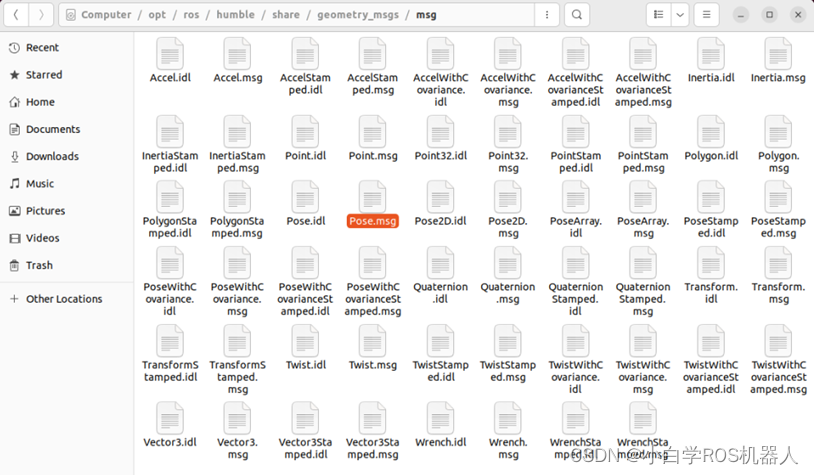
大家可能好奇ROS系统到底给我们定义了哪些接口呢?我们可以在ROS安装路径中的share文件夹中找到,涵盖众多标准定义,大家可以打开几个看看。
案例一:服务接口的定义与使用
了解了通信接口的概念,接下来我们再从代码实现的角度,研究下如何定义以及使用一个接口。
在之前服务概念讲解的课程中,我们编写了这样一个例程,我们再来回顾下。

有三个节点,第一个驱动相机发布图像话题,第二个是机器视觉识别节点,封装了一个服务的服务端对象,提供目标识别位置的查询服务,第三个节点在需要目标位置的时候,就可以发送请求,收到位置进行使用了。

接口定义
在这个例程中,我们使用GetObjectPosition.srv定义了服务通信的接口:
learning_interface/srv/GetObjectPosition.srv
bool get # 获取目标位置的指令
---
int32 x # 目标的X坐标
int32 y # 目标的Y坐标
定义中有两个部分,上边是获取目标位置的指令,get为true的话,就表示我们需要一次位置,服务端就会反馈这个x、y坐标了。
完成定义后,还需要在功能包的CMakeLists.txt中配置编译选项,让编译器在编译过程中
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1005
1005

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









