







 本文详细介绍了使用HiPQTools的HiPQStitchingTool进行图像拼接标定的过程,包括模型标定、产线标定、生成LUT表和软件预览。重点讲解了标定步骤,如棋盘格图像的拍摄要求、镜头类型选择、图片命名规则,以及如何使用工具进行标定和生成.cal文件。
本文详细介绍了使用HiPQTools的HiPQStitchingTool进行图像拼接标定的过程,包括模型标定、产线标定、生成LUT表和软件预览。重点讲解了标定步骤,如棋盘格图像的拍摄要求、镜头类型选择、图片命名规则,以及如何使用工具进行标定和生成.cal文件。
一、挑件海思文档重要描述
1、拼接原理:
使用HiPQTools工具HiPQStitchingTool进行图像拼接,就要先进行标定,确定相机之间的位置关系,和畸变校正,
前面写的文章中,介绍了,使用opencv的surf特征匹配和最佳缝合线算法,进行处理,然后离线计算获得参数,查表法进行图像拼接
存在局限性,只能适合静态的放置相机,和纹理丰富的场景,安防监控,不适合运动的场景,比如车载运动的全景场景。
全景拼接的基本方法是将各路采集的图像按照对应的镜头模型投影到虚拟球面,进行拼接融合,然后再通过设置的投影方式输出平面全图。AVSP 标定的目的就是通过标定估计出相应的镜头模型参数,包括内部参数、外部参数及有效区域。其中内部参数用于矫正镜头的畸变,外部参数用于匹配不同镜头之间的相对位置,有效区域的标定主要是为了减小重叠区从而减小系统的处理压力,特别是鱼眼图像,由于鱼眼图像有效区域为圆饼图,故需要将相应的圆饼图区域标定出来进行处理,其他区域省略,提高系统处理效率。
步骤 1 模型标定。
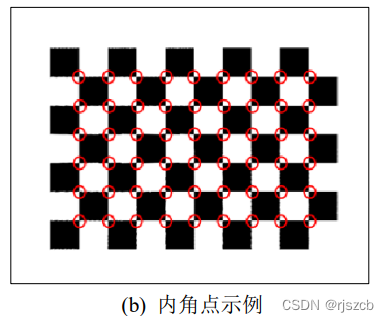
模型标定阶段每个产品类型只需标定一次,可从同一批产品中挑选一个结构最佳的机器作为模型标定机器。标定时该机器需要拍取大量的棋盘格图片,以保证标定结果的鲁棒性。第一步标定完成后可使用 AVSP 标定工具生成模型标定结果.cal 文件。模型标定需要一个特定的棋盘格,推荐使用规格如图 3-2(a)所示,具体规格如下:棋盘格内角点数为 9*6,内角点的定义如图 3-2(b)红圈所示,单个格子大小 5cm。棋盘格边缘保留至少 8cm 以上的白色边缘,有利于提高棋盘格检测的速度及准确性
角点,指的是如下红圈的点。
标定时需确定镜头 FOV 及镜头类型,便于模型计算快速收敛。其中 FOV 指 sensor 成像的水平视角,即图像宽度所对应的 FOV。另外镜头模型提供三种类型,分别为 Non Fisheye, Fisheye Full Fov 及 Fisheye Circular Fov,其区别如图 3-3 所示。一般情况下,
长焦畸变较小的镜头选择 Non Fisheye 类型,短焦广角镜头选择 Fisheye Full Fov 模型,因为一般广角镜头也是鱼眼模型,鱼眼镜头选择 Fisheye Circular Fov
模型标定需要抓取以下两类场景的图片:只要相邻的相机,有重叠区域的,都要进行一对一标定。
标定单镜头的畸变矫正的场景
该场景标定图用于标定镜头内参。每个镜头至少拍取 10 张图像。
保存时以<固定前缀名><镜头号><
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1837
1837

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









