




1)基本飞行控制
-
前后移动:
-
前飞:后两电机转速>前两电机转速
-
后飞:前两电机转速>后两电机转速
-
-
左右平移:
-
左移:右两电机转速>左两电机转速
-
右移:左两电机转速>右两电机转速
-
-
原理分析:通过电机转速差产生倾角,合力分解为升力和水平拉力
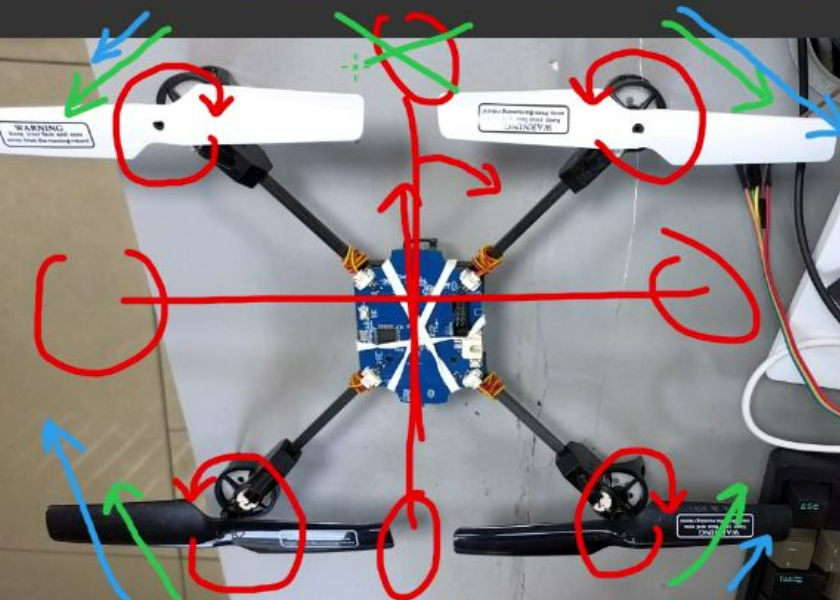
2)旋转控制原理
反扭矩现象:主旋翼旋转会产生反向扭矩使机身自旋
-
对角对称性:四个旋翼必须两两反向旋转
-
安装要求:实际装配时必须配备2个正桨和2个反桨
-
转向控制机制:
-
提高对角旋翼转速可产生旋转力矩(16:47处讲解)
-
降低另一对角旋翼转速增强转向效果
-
3)无人机旋翼反作用力与平衡原理
升力产生原理:
-
顺时针旋翼:左上角旋翼需顺时针旋转产生升力
-
逆时针旋翼:右上角旋翼需逆时针旋转产生升力
扭矩平衡:
-
顺时针旋转的旋翼会产生逆时针方向的反作用力
-
逆时针旋转的旋翼会产生顺时针方向的反作用力
-
力偶抵消:对角线上两个旋翼的反作用力相互抵消
-
动态平衡:四个旋翼转速相同时,无人机保持稳定悬停
4)多旋翼冗余设计
-
安全冗余设计:
-
四旋翼系统:单个旋翼故障会导致不可控自旋
-
八旋翼系统:可通过关闭对称旋翼实现应急降落
-
-
行业应用要求:
-
农用无人机常采用8-12个旋翼增加可靠性
-
飞行汽车等载人设备需要更高冗余度
-
5)螺旋桨转向规律
-
典型单旋翼直升机构型:由主旋翼和尾桨组成,主旋翼提供升力,尾桨用于抵消反扭矩,通过改变旋翼桨叶的变距角度来调节升力大小,相比多旋翼无人机,单旋翼构型在机动灵活性方面存在局限
-
尾桨作用:
-
平衡反扭矩
-
控制旋转方向
-
增加转速:机头右转
-
减小转速:机头左转
-
-
倾斜盘:桨叶能随倾斜盘姿态倾斜,实现前后左右运动。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









