






 本文档介绍了如何使用STM32CubeMX配置STM32F103C8t6微控制器,并结合Clion IDE实现MPU6050传感器的集成。内容包括时钟、GPIO、串口的配置,以及代码生成和Clion中的代码编写步骤。
本文档介绍了如何使用STM32CubeMX配置STM32F103C8t6微控制器,并结合Clion IDE实现MPU6050传感器的集成。内容包括时钟、GPIO、串口的配置,以及代码生成和Clion中的代码编写步骤。
一、STM32F103C8t6
本代码是基于STM32F103C8t6来实现的。
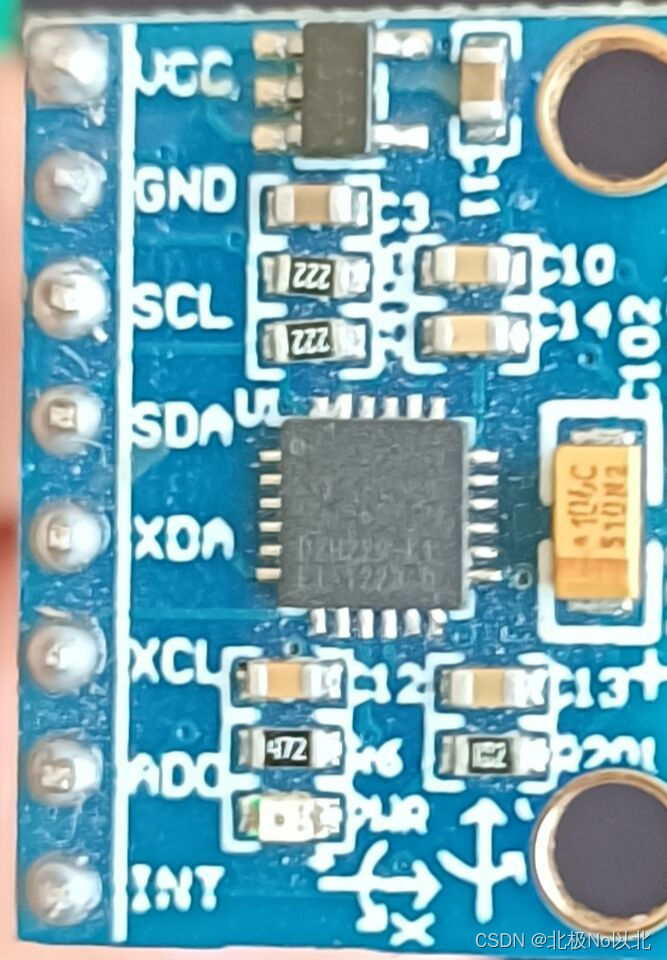
二、MPU6050
三、Cubemx的配置
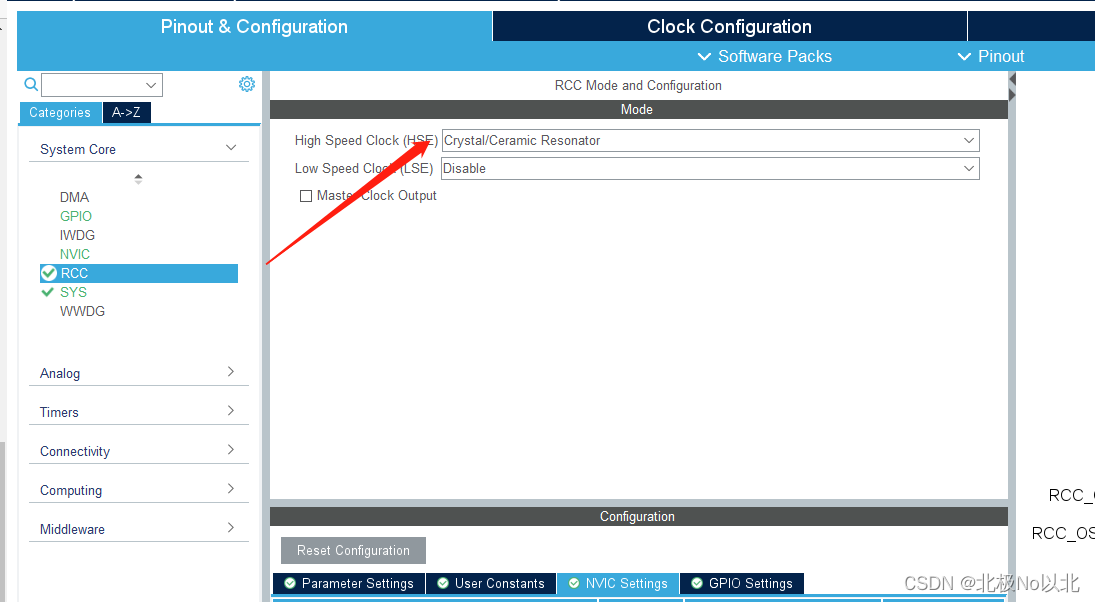
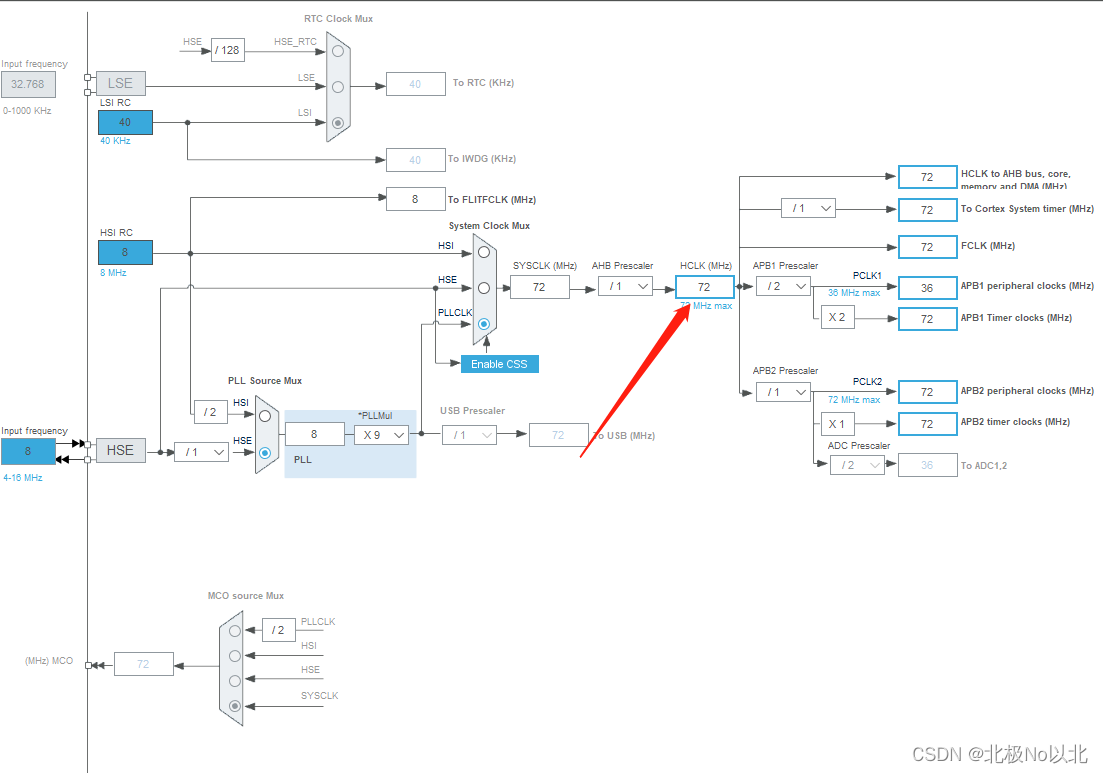
1.时钟
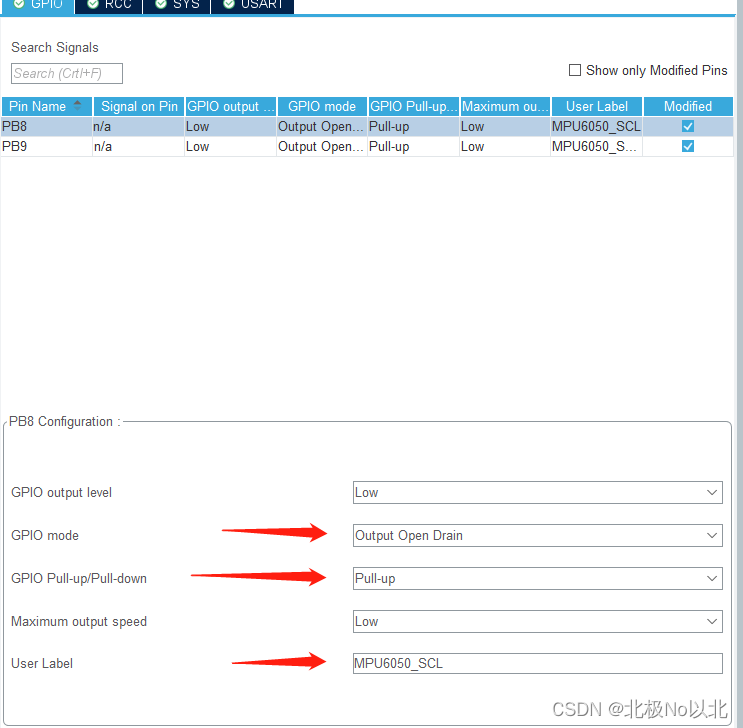
2.GPIO(两个引脚都要设置为开漏输出)
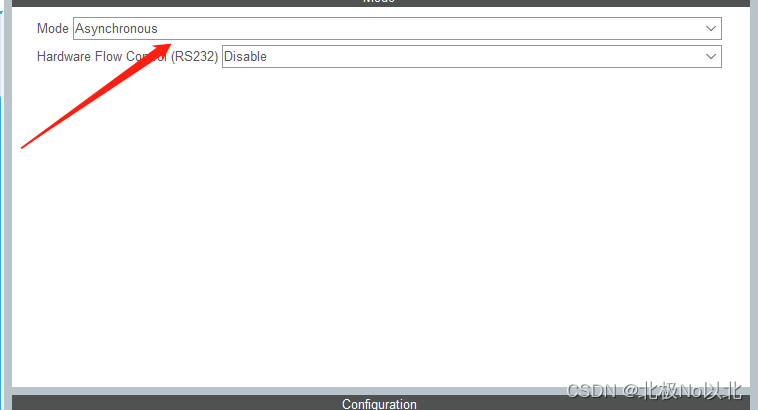
3.串口的设置
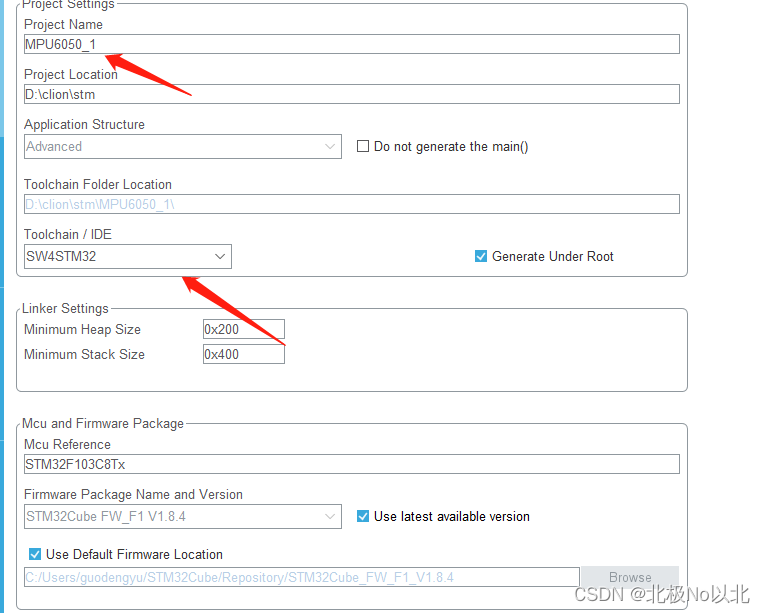
4.配置project
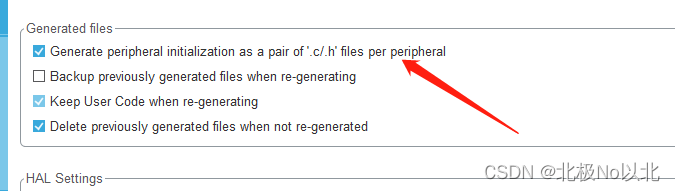
5.然后生成代码
四、clion的中的部分代码
1.先加入MPU6050的DMP
2.main.c中加入:
MPU_Init(); //MPU6050初始化
mpu_dmp_init(); //dmp初始化
HAL_Delay(500);
while(mpu_dmp_get_data(&pitch, &roll, &yaw)); //必须要用while等待,才能读取成功
MPU_Get_Accelerometer(&aacx,&aacy, &aacz); //得到加速度传感器数据
MPU_Get_Gyroscope(&gyrox, &gyroy, &gyroz); //得到陀螺仪数据
temp=MPU_Get_Temperature(); //得到温度信息
sprintf((char *)str,"X:%.1f度 Y:%.1f度 Z:%.1f度 %.2f度C\r\n",roll,pitch,yaw,temp/100);//????1????????????
HAL_UART_Transmit(&huart1,str,sizeof(str),10000);3.mpu6050.c
#include "stm32f1xx_hal.h"
#include "mpu6050.h"
//³õʼ»¯MPU6050
//·µ»ØÖµ:0,³É¹¦
// ÆäËû,´íÎó´úÂë
uint8_t MPU_Init(void)
{
uint8_t res;
MPU_IIC_Init();//³õʼ»¯IIC×ÜÏß
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80); //¸´Î»MPU6050
delay_ms(100);
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00); //»½ÐÑMPU6050
MPU_Set_Gyro_Fsr(3); //ÍÓÂÝÒÇ´«¸ÐÆ÷,¡À2000dps
MPU_Set_Accel_Fsr(0); //¼ÓËٶȴ«¸ÐÆ÷,¡À2g
MPU_Set_Rate(50); //ÉèÖòÉÑùÂÊ50Hz
MPU_Write_Byte(MPU_INT_EN_REG,0X00); //¹Ø±ÕËùÓÐÖжÏ
MPU_Write_Byte(MPU_USER_CTRL_REG,0X00); //I2CÖ÷ģʽ¹Ø±Õ
MPU_Write_Byte(MPU_FIFO_EN_REG,0X00); //¹Ø±ÕFIFO
MPU_Write_Byte(MPU_INTBP_CFG_REG,0X80); //INTÒý½ÅµÍµçƽÓÐЧ
res=MPU_Read_Byte(MPU_DEVICE_ID_REG);
if(res==MPU_ADDR)//Æ÷¼þIDÕýÈ·
{
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01); //ÉèÖÃCLKSEL,PLL XÖáΪ²Î¿¼
MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00); //¼ÓËÙ¶ÈÓëÍÓÂÝÒǶ¼¹¤×÷
MPU_Set_Rate(50); //ÉèÖòÉÑùÂÊΪ50Hz
} else return 1;
return 0;
}
//ÉèÖÃMPU6050ÍÓÂÝÒÇ´«¸ÐÆ÷ÂúÁ¿³Ì·¶Î§
//fsr:0,¡À250dps;1,¡À500dps;2,¡À1000dps;3,¡À2000dps
//·µ»ØÖµ:0,ÉèÖóɹ¦
// ÆäËû,ÉèÖÃʧ°Ü
uint8_t MPU_Set_Gyro_Fsr(uint8_t fsr)
{
return MPU_Write_Byte(MPU_GYRO_CFG_REG,fsr<<3);//ÉèÖÃÍÓÂÝÒÇÂúÁ¿³Ì·¶Î§
}
//ÉèÖÃMPU6050¼ÓËٶȴ«¸ÐÆ÷ÂúÁ¿³Ì·¶Î§
//fsr:0,¡À2g;1,¡À4g;2,¡À8g;3,¡À16g
//·µ»ØÖµ:0,ÉèÖóɹ¦
// ÆäËû,ÉèÖÃʧ°Ü
uint8_t MPU_Set_Accel_Fsr(uint8_t fsr)
{
return MPU_Write_Byte(MPU_ACCEL_CFG_REG,fsr<<3);//ÉèÖüÓËٶȴ«¸ÐÆ÷ÂúÁ¿³Ì·¶Î§
}
//ÉèÖÃMPU6050µÄÊý×ÖµÍͨÂ˲¨Æ÷
//lpf:Êý×ÖµÍͨÂ˲¨ÆµÂÊ(Hz)
//·µ»ØÖµ:0,ÉèÖóɹ¦
// ÆäËû,ÉèÖÃʧ°Ü
uint8_t MPU_Set_LPF(uint16_t lpf)
{
uint8_t data=0;
if(lpf>=188)data=1;
else if(lpf>=98)data=2;
else if(lpf>=42)data=3;
else if(lpf>=20)data=4;
else if(lpf>=10)data=5;
else data=6;
return MPU_Write_Byte(MPU_CFG_REG,data);//ÉèÖÃÊý×ÖµÍͨÂ˲¨Æ÷
}
//ÉèÖÃMPU6050µÄ²ÉÑùÂÊ(¼Ù¶¨Fs=1KHz)
//rate:4~1000(Hz)
//·µ»ØÖµ:0,ÉèÖóɹ¦
// ÆäËû,ÉèÖÃʧ°Ü
uint8_t MPU_Set_Rate(uint16_t rate)
{
uint8_t data;
if(rate>1000)rate=1000;
if(rate<4)rate=4;
data=1000/rate-1;
data=MPU_Write_Byte(MPU_SAMPLE_RATE_REG,data); //ÉèÖÃÊý×ÖµÍͨÂ˲¨Æ÷
return MPU_Set_LPF(rate/2); //×Ô¶¯ÉèÖÃLPFΪ²ÉÑùÂʵÄÒ»°ë
}
//µÃµ½Î¶ÈÖµ
//·µ»ØÖµ:ζÈÖµ(À©´óÁË100±¶)
short MPU_Get_Temperature(void)
{
uint8_t buf[2];
short raw;
float temp;
MPU_Read_Len(MPU_ADDR,MPU_TEMP_OUTH_REG,2,buf);
raw=((uint16_t)buf[0]<<8)|buf[1];
temp=36.53+((double)raw)/340;
return temp*100;;
}
//µÃµ½ÍÓÂÝÒÇÖµ(Ôʼֵ)
//gx,gy,gz:ÍÓÂÝÒÇx,y,zÖáµÄÔʼ¶ÁÊý(´ø·ûºÅ)
//·µ»ØÖµ:0,³É¹¦
// ÆäËû,´íÎó´úÂë
uint8_t MPU_Get_Gyroscope(short *gx,short *gy,short *gz)
{
uint8_t buf[6],res;
res=MPU_Read_Len(MPU_ADDR,MPU_GYRO_XOUTH_REG,6,buf);
if(res==0)
{
*gx=((uint16_t)buf[0]<<8)|buf[1];
*gy=((uint16_t)buf[2]<<8)|buf[3];
*gz=((uint16_t)buf[4]<<8)|buf[5];
}
return res;;
}
//µÃµ½¼ÓËÙ¶ÈÖµ(Ôʼֵ)
//gx,gy,gz:ÍÓÂÝÒÇx,y,zÖáµÄÔʼ¶ÁÊý(´ø·ûºÅ)
//·µ»ØÖµ:0,³É¹¦
// ÆäËû,´íÎó´úÂë
uint8_t MPU_Get_Accelerometer(short *ax,short *ay,short *az)
{
uint8_t buf[6],res;
res=MPU_Read_Len(MPU_ADDR,MPU_ACCEL_XOUTH_REG,6,buf);
if(res==0)
{
*ax=((uint16_t)buf[0]<<8)|buf[1];
*ay=((uint16_t)buf[2]<<8)|buf[3];
*az=((uint16_t)buf[4]<<8)|buf[5];
}
return res;;
}
//IICÁ¬Ðøд
//addr:Æ÷¼þµØÖ·
//reg:¼Ä´æÆ÷µØÖ·
//len:дÈ볤¶È
//buf:Êý¾ÝÇø
//·µ»ØÖµ:0,Õý³£
// ÆäËû,´íÎó´úÂë
uint8_t MPU_Write_Len(uint8_t addr,uint8_t reg,uint8_t len,uint8_t *buf)
{
uint8_t i;
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr<<1)|0);//·¢ËÍÆ÷¼þµØÖ·+дÃüÁî
if(MPU_IIC_Wait_Ack()) //µÈ´ýÓ¦´ð
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); //д¼Ä´æÆ÷µØÖ·
MPU_IIC_Wait_Ack(); //µÈ´ýÓ¦´ð
for(i=0; i<len; i++)
{
MPU_IIC_Send_Byte(buf[i]); //·¢ËÍÊý¾Ý
if(MPU_IIC_Wait_Ack()) //µÈ´ýACK
{
MPU_IIC_Stop();
return 1;
}
}
MPU_IIC_Stop();
return 0;
}
//IICÁ¬Ðø¶Á
//addr:Æ÷¼þµØÖ·
//reg:Òª¶ÁÈ¡µÄ¼Ä´æÆ÷µØÖ·
//len:Òª¶ÁÈ¡µÄ³¤¶È
//buf:¶ÁÈ¡µ½µÄÊý¾Ý´æ´¢Çø
//·µ»ØÖµ:0,Õý³£
// ÆäËû,´íÎó´úÂë
uint8_t MPU_Read_Len(uint8_t addr,uint8_t reg,uint8_t len,uint8_t *buf)
{
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr<<1)|0);//·¢ËÍÆ÷¼þµØÖ·+дÃüÁî
if(MPU_IIC_Wait_Ack()) //µÈ´ýÓ¦´ð
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); //д¼Ä´æÆ÷µØÖ·
MPU_IIC_Wait_Ack(); //µÈ´ýÓ¦´ð
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr<<1)|1);//·¢ËÍÆ÷¼þµØÖ·+¶ÁÃüÁî
MPU_IIC_Wait_Ack(); //µÈ´ýÓ¦´ð
while(len)
{
if(len==1)*buf=MPU_IIC_Read_Byte(0);//¶ÁÊý¾Ý,·¢ËÍnACK
else *buf=MPU_IIC_Read_Byte(1); //¶ÁÊý¾Ý,·¢ËÍACK
len--;
buf++;
}
MPU_IIC_Stop(); //²úÉúÒ»¸öÍ£Ö¹Ìõ¼þ
return 0;
}
//IICдһ¸ö×Ö½Ú
//reg:¼Ä´æÆ÷µØÖ·
//data:Êý¾Ý
//·µ»ØÖµ:0,Õý³£
// ÆäËû,´íÎó´úÂë
uint8_t MPU_Write_Byte(uint8_t reg,uint8_t data)
{
MPU_IIC_Start();
MPU_IIC_Send_Byte((MPU_ADDR<<1)|0);//·¢ËÍÆ÷¼þµØÖ·+дÃüÁî
if(MPU_IIC_Wait_Ack()) //µÈ´ýÓ¦´ð
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); //д¼Ä´æÆ÷µØÖ·
MPU_IIC_Wait_Ack(); //µÈ´ýÓ¦´ð
MPU_IIC_Send_Byte(data);//·¢ËÍÊý¾Ý
if(MPU_IIC_Wait_Ack()) //µÈ´ýACK
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Stop();
return 0;
}
//IIC¶ÁÒ»¸ö×Ö½Ú
//reg:¼Ä´æÆ÷µØÖ·
//·µ»ØÖµ:¶Áµ½µÄÊý¾Ý
uint8_t MPU_Read_Byte(uint8_t reg)
{
uint8_t res;
MPU_IIC_Start();
MPU_IIC_Send_Byte((MPU_ADDR<<1)|0);//·¢ËÍÆ÷¼þµØÖ·+дÃüÁî
MPU_IIC_Wait_Ack(); //µÈ´ýÓ¦´ð
MPU_IIC_Send_Byte(reg); //д¼Ä´æÆ÷µØÖ·
MPU_IIC_Wait_Ack(); //µÈ´ýÓ¦´ð
MPU_IIC_Start();
MPU_IIC_Send_Byte((MPU_ADDR<<1)|1);//·¢ËÍÆ÷¼þµØÖ·+¶ÁÃüÁî
MPU_IIC_Wait_Ack(); //µÈ´ýÓ¦´ð
res=MPU_IIC_Read_Byte(0);//¶ÁÈ¡Êý¾Ý,·¢ËÍnACK
MPU_IIC_Stop(); //²úÉúÒ»¸öÍ£Ö¹Ìõ¼þ
return res;
}
mpu6050.h
#ifndef __MPU6050_H
#define __MPU6050_H
#include "IIC.h"
#define delay_ms HAL_Delay
#define MPU_IIC_Init IIC_GPIO_Init
#define MPU_IIC_Start IIC_Start
#define MPU_IIC_Stop IIC_Stop
#define MPU_IIC_Send_Byte IIC_Send_Byte
#define MPU_IIC_Read_Byte IIC_Read_Byte
#define MPU_IIC_Wait_Ack IIC_Wait_Ack
//#define MPU_ACCEL_OFFS_REG 0X06 //accel_offs¼Ä´æÆ÷,¿É¶ÁÈ¡°æ±¾ºÅ,¼Ä´æÆ÷ÊÖ²áδÌáµ½
//#define MPU_PROD_ID_REG 0X0C //prod id¼Ä´æÆ÷,ÔڼĴæÆ÷ÊÖ²áδÌáµ½
#define MPU_SELF_TESTX_REG 0X0D //×Ô¼ì¼Ä´æÆ÷X
#define MPU_SELF_TESTY_REG 0X0E //×Ô¼ì¼Ä´æÆ÷Y
#define MPU_SELF_TESTZ_REG 0X0F //×Ô¼ì¼Ä´æÆ÷Z
#define MPU_SELF_TESTA_REG 0X10 //×Ô¼ì¼Ä´æÆ÷A
#define MPU_SAMPLE_RATE_REG 0X19 //²ÉÑùƵÂÊ·ÖƵÆ÷
#define MPU_CFG_REG 0X1A //ÅäÖüĴæÆ÷
#define MPU_GYRO_CFG_REG 0X1B //ÍÓÂÝÒÇÅäÖüĴæÆ÷
#define MPU_ACCEL_CFG_REG 0X1C //¼ÓËٶȼÆÅäÖüĴæÆ÷
#define MPU_MOTION_DET_REG 0X1F //Ô˶¯¼ì²â·§ÖµÉèÖüĴæÆ÷
#define MPU_FIFO_EN_REG 0X23 //FIFOʹÄܼĴæÆ÷
#define MPU_I2CMST_CTRL_REG 0X24 //IICÖ÷»ú¿ØÖƼĴæÆ÷
#define MPU_I2CSLV0_ADDR_REG 0X25 //IIC´Ó»ú0Æ÷¼þµØÖ·¼Ä´æÆ÷
#define MPU_I2CSLV0_REG 0X26 //IIC´Ó»ú0Êý¾ÝµØÖ·¼Ä´æÆ÷
#define MPU_I2CSLV0_CTRL_REG 0X27 //IIC´Ó»ú0¿ØÖƼĴæÆ÷
#define MPU_I2CSLV1_ADDR_REG 0X28 //IIC´Ó»ú1Æ÷¼þµØÖ·¼Ä´æÆ÷
#define MPU_I2CSLV1_REG 0X29 //IIC´Ó»ú1Êý¾ÝµØÖ·¼Ä´æÆ÷
#define MPU_I2CSLV1_CTRL_REG 0X2A //IIC´Ó»ú1¿ØÖƼĴæÆ÷
#define MPU_I2CSLV2_ADDR_REG 0X2B //IIC´Ó»ú2Æ÷¼þµØÖ·¼Ä´æÆ÷
#define MPU_I2CSLV2_REG 0X2C //IIC´Ó»ú2Êý¾ÝµØÖ·¼Ä´æÆ÷
#define MPU_I2CSLV2_CTRL_REG 0X2D //IIC´Ó»ú2¿ØÖƼĴæÆ÷
#define MPU_I2CSLV3_ADDR_REG 0X2E //IIC´Ó»ú3Æ÷¼þµØÖ·¼Ä´æÆ÷
#define MPU_I2CSLV3_REG 0X2F //IIC´Ó»ú3Êý¾ÝµØÖ·¼Ä´æÆ÷
#define MPU_I2CSLV3_CTRL_REG 0X30 //IIC´Ó»ú3¿ØÖƼĴæÆ÷
#define MPU_I2CSLV4_ADDR_REG 0X31 //IIC´Ó»ú4Æ÷¼þµØÖ·¼Ä´æÆ÷
#define MPU_I2CSLV4_REG 0X32 //IIC´Ó»ú4Êý¾ÝµØÖ·¼Ä´æÆ÷
#define MPU_I2CSLV4_DO_REG 0X33 //IIC´Ó»ú4дÊý¾Ý¼Ä´æÆ÷
#define MPU_I2CSLV4_CTRL_REG 0X34 //IIC´Ó»ú4¿ØÖƼĴæÆ÷
#define MPU_I2CSLV4_DI_REG 0X35 //IIC´Ó»ú4¶ÁÊý¾Ý¼Ä´æÆ÷
#define MPU_I2CMST_STA_REG 0X36 //IICÖ÷»ú״̬¼Ä´æÆ÷
#define MPU_INTBP_CFG_REG 0X37 //ÖжÏ/ÅÔ·ÉèÖüĴæÆ÷
#define MPU_INT_EN_REG 0X38 //ÖжÏʹÄܼĴæÆ÷
#define MPU_INT_STA_REG 0X3A //ÖжÏ״̬¼Ä´æÆ÷
#define MPU_ACCEL_XOUTH_REG 0X3B //¼ÓËÙ¶ÈÖµ,XÖá¸ß8λ¼Ä´æÆ÷
#define MPU_ACCEL_XOUTL_REG 0X3C //¼ÓËÙ¶ÈÖµ,XÖáµÍ8λ¼Ä´æÆ÷
#define MPU_ACCEL_YOUTH_REG 0X3D //¼ÓËÙ¶ÈÖµ,YÖá¸ß8λ¼Ä´æÆ÷
#define MPU_ACCEL_YOUTL_REG 0X3E //¼ÓËÙ¶ÈÖµ,YÖáµÍ8λ¼Ä´æÆ÷
#define MPU_ACCEL_ZOUTH_REG 0X3F //¼ÓËÙ¶ÈÖµ,ZÖá¸ß8λ¼Ä´æÆ÷
#define MPU_ACCEL_ZOUTL_REG 0X40 //¼ÓËÙ¶ÈÖµ,ZÖáµÍ8λ¼Ä´æÆ÷
#define MPU_TEMP_OUTH_REG 0X41 //ζÈÖµ¸ß°Ëλ¼Ä´æÆ÷
#define MPU_TEMP_OUTL_REG 0X42 //ζÈÖµµÍ8λ¼Ä´æÆ÷
#define MPU_GYRO_XOUTH_REG 0X43 //ÍÓÂÝÒÇÖµ,XÖá¸ß8λ¼Ä´æÆ÷
#define MPU_GYRO_XOUTL_REG 0X44 //ÍÓÂÝÒÇÖµ,XÖáµÍ8λ¼Ä´æÆ÷
#define MPU_GYRO_YOUTH_REG 0X45 //ÍÓÂÝÒÇÖµ,YÖá¸ß8λ¼Ä´æÆ÷
#define MPU_GYRO_YOUTL_REG 0X46 //ÍÓÂÝÒÇÖµ,YÖáµÍ8λ¼Ä´æÆ÷
#define MPU_GYRO_ZOUTH_REG 0X47 //ÍÓÂÝÒÇÖµ,ZÖá¸ß8λ¼Ä´æÆ÷
#define MPU_GYRO_ZOUTL_REG 0X48 //ÍÓÂÝÒÇÖµ,ZÖáµÍ8λ¼Ä´æÆ÷
#define MPU_I2CSLV0_DO_REG 0X63 //IIC´Ó»ú0Êý¾Ý¼Ä´æÆ÷
#define MPU_I2CSLV1_DO_REG 0X64 //IIC´Ó»ú1Êý¾Ý¼Ä´æÆ÷
#define MPU_I2CSLV2_DO_REG 0X65 //IIC´Ó»ú2Êý¾Ý¼Ä´æÆ÷
#define MPU_I2CSLV3_DO_REG 0X66 //IIC´Ó»ú3Êý¾Ý¼Ä´æÆ÷
#define MPU_I2CMST_DELAY_REG 0X67 //IICÖ÷»úÑÓʱ¹ÜÀí¼Ä´æÆ÷
#define MPU_SIGPATH_RST_REG 0X68 //ÐźÅͨµÀ¸´Î»¼Ä´æÆ÷
#define MPU_MDETECT_CTRL_REG 0X69 //Ô˶¯¼ì²â¿ØÖƼĴæÆ÷
#define MPU_USER_CTRL_REG 0X6A //Óû§¿ØÖƼĴæÆ÷
#define MPU_PWR_MGMT1_REG 0X6B //µçÔ´¹ÜÀí¼Ä´æÆ÷1
#define MPU_PWR_MGMT2_REG 0X6C //µçÔ´¹ÜÀí¼Ä´æÆ÷2
#define MPU_FIFO_CNTH_REG 0X72 //FIFO¼ÆÊý¼Ä´æÆ÷¸ß°Ëλ
#define MPU_FIFO_CNTL_REG 0X73 //FIFO¼ÆÊý¼Ä´æÆ÷µÍ°Ëλ
#define MPU_FIFO_RW_REG 0X74 //FIFO¶Áд¼Ä´æÆ÷
#define MPU_DEVICE_ID_REG 0X75 //Æ÷¼þID¼Ä´æÆ÷
//Èç¹ûAD0½Å(9½Å)½ÓµØ,IICµØַΪ0X68(²»°üº¬×îµÍλ).
//Èç¹û½ÓV3.3,ÔòIICµØַΪ0X69(²»°üº¬×îµÍλ).
#define MPU_ADDR 0X68
ÒòΪģ¿éAD0ĬÈϽÓGND,ËùÒÔתΪ¶ÁдµØÖ·ºó,Ϊ0XD1ºÍ0XD0(Èç¹û½ÓVCC,ÔòΪ0XD3ºÍ0XD2)
//#define MPU_READ 0XD1
//#define MPU_WRITE 0XD0
uint8_t MPU_Init(void); //³õʼ»¯MPU6050
uint8_t MPU_Write_Len(uint8_t addr,uint8_t reg,uint8_t len,uint8_t *buf);//IICÁ¬Ðøд
uint8_t MPU_Read_Len(uint8_t addr,uint8_t reg,uint8_t len,uint8_t *buf); //IICÁ¬Ðø¶Á
uint8_t MPU_Write_Byte(uint8_t reg,uint8_t data); //IICдһ¸ö×Ö½Ú
uint8_t MPU_Read_Byte(uint8_t reg); //IIC¶ÁÒ»¸ö×Ö½Ú
uint8_t MPU_Set_Gyro_Fsr(uint8_t fsr);
uint8_t MPU_Set_Accel_Fsr(uint8_t fsr);
uint8_t MPU_Set_LPF(uint16_t lpf);
uint8_t MPU_Set_Rate(uint16_t rate);
uint8_t MPU_Set_Fifo(uint8_t sens);
short MPU_Get_Temperature(void);
uint8_t MPU_Get_Gyroscope(short *gx,short *gy,short *gz);
uint8_t MPU_Get_Accelerometer(short *ax,short *ay,short *az);
#endif
由于代码太多,就不一一展示了。

















 452
452

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









