




 本文针对ROS环境下Gazebo机械臂控制问题进行分析,详细介绍了遇到“Actionclientnotconnected”错误的原因及解决方法,并提供了具体的配置文件修改方案。
本文针对ROS环境下Gazebo机械臂控制问题进行分析,详细介绍了遇到“Actionclientnotconnected”错误的原因及解决方法,并提供了具体的配置文件修改方案。
[ERROR] : Action client not connected: arm_controller/follow_joint_trajectory解决方案(亲测)
前言
此问题来自在习胡春旭大神的《ROS机器人开发实践》中Moveit控制Gazebo机械臂部分的,网搜了一堆解决方案,越搜越晕乎。下面说一下这个问题的分析和解决方案:
一、问题?
运行代码:
roslaunch marm_gazebo arm_bringup_moveit.launch
出现错误提示:
[ERROR] [1615532139.099507349, 17.195000000]: Action client not connected: arm_controller/follow_joint_trajectory
[ERROR] [1615532156.189679373, 34.258000000]: Action client not connected: gripper_controller/gripper_action

实际操作现象:Rviz中的机械臂可以正常做规划和执行,但是Gazebo中机械臂没有反应。
二、分析原因
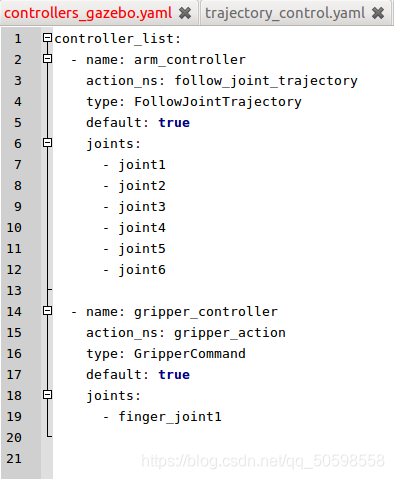
书中和网搜结果得知出现这个问题的原因是Gazebo中ros_controller发布的action无发与MoveIt控制器对接,解决方法是保证MoveIt控制器的命名空间与机械臂控制器插件的命名空间相同,检查文件中的代码这两个命名是相同的。
第一个文件位置:hh_ws/src/marm_moveit_config/config/controllers_gazebo.yaml
第二个文件位置:/home/cothink/hh_ws/src/marm_gazebo/config/trajectory_control.yaml
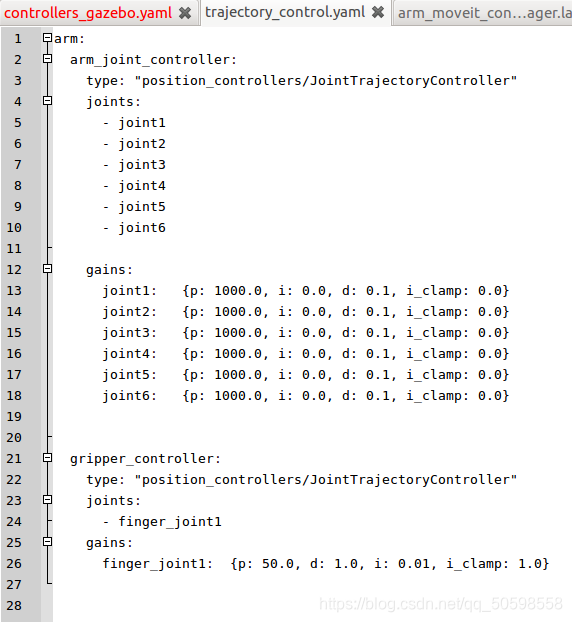
那么从原理角度学习,可以理解为gazebo是一个action server,moveit那边是一个action client,轨迹通过Action机制发出来,sever这一端接收轨迹,完成插补运算,再发到每一个电机位置控制接口上。上面已经检查过了,命名空间是一致的(也就是插头和插座可以匹配)。那么插座和插头可以连接,原因可能是MoveIt上层规划的问题,可以理解为“停电了”。
三、解决方案
修改需要运行的launch文件,具体涉及加载修改之后的配置文件,$(find marm_moveit_config)/config/controllers_gazebo.yaml
代码如下:
<launch>
<arg name="moveit_controller_manager" default="moveit_simple_controller_manager/MoveItSimpleControllerManager" />
<param name="moveit_controller_manager" value="$(arg moveit_controller_manager)"/>
<rosparam file="$(find marm_moveit_config)/config/controllers_gazebo.yaml"/>
</launch>
四、最终实现

参考博客:链接: https://blog.youkuaiyun.com/.


















 728
728

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









