







 本文介绍了如何在ROS中定义和使用Msg文件,包括创建Msg文件的格式、配置包依赖及编译流程等内容。
本文介绍了如何在ROS中定义和使用Msg文件,包括创建Msg文件的格式、配置包依赖及编译流程等内容。
1.定义msg文件 或者直接导入 msg文件
std_msgs/Header header
float32 speed # the speed of ego vehicle
int32 drivepedal # the drive pedal of ego vehicle
int32 brakepedal # the brake pedal of ego vehicle
2.编辑配置文件
package.xml中添加编译依赖与执行依赖
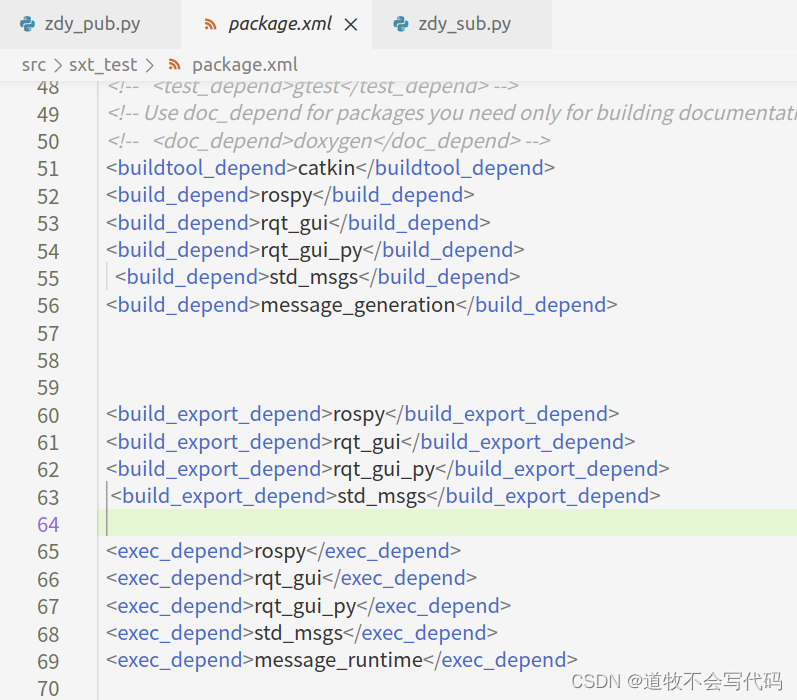
<build_depend>std_msgs</build_depend>
<build_depend>message_generation</build_depend>
<build_export_depend>std_msgs</build_export_depend>
<exec_depend>std_msgs</exec_depend>
<exec_depend>message_runtime</exec_depend>
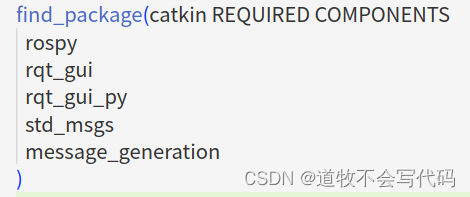
注意 std_msgs message_generation message_runtimeCMakeLists.txt编辑 msg 相关配置
补充更新:如果msg格式中有 geometry_msgs/Pose pose 或者其他的不是基于常用的 std_msgs ,则需要单独的导入对于的包以及在 generate_messages 里添加上这个包的依赖。
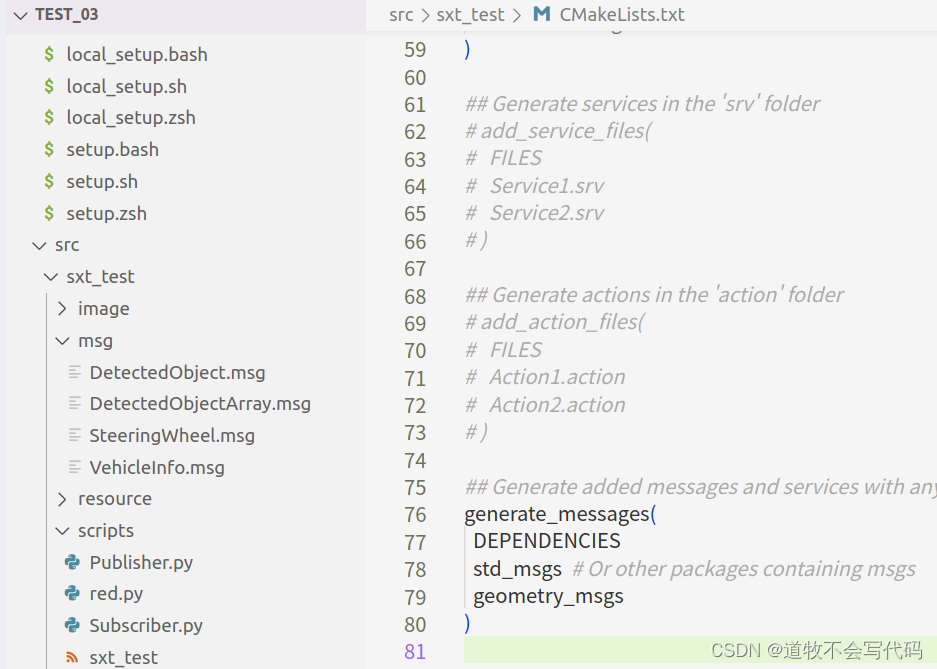
包依赖的配置
# 需要加入 message_generation,必须有 std_msgs配置 msg 源文件
add_message_files(
FILES
你有msg文件名字.msg
)解开注释 generate_messages
# 生成消息时依赖于 std_msgs
generate_messages(
DEPENDENCIES
std_msgs
)
catkin_package
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES sxt_test
CATKIN_DEPENDS rospy rqt_gui rqt_gui_py std_msgs message_runtime
# DEPENDS system_lib
)3.编译
vscode------- ctrl+shift+b
命令行-----catkin_make
编译后的中间文件查看:
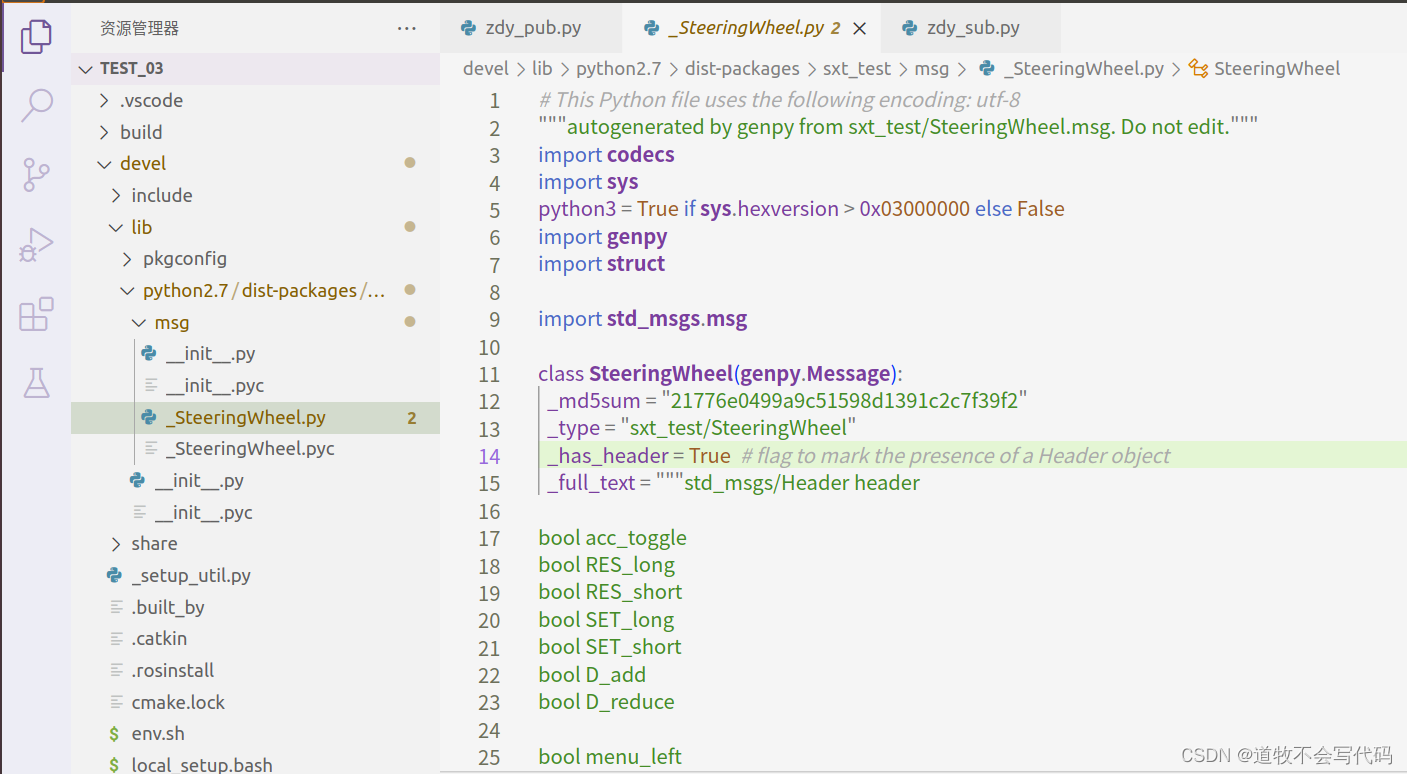
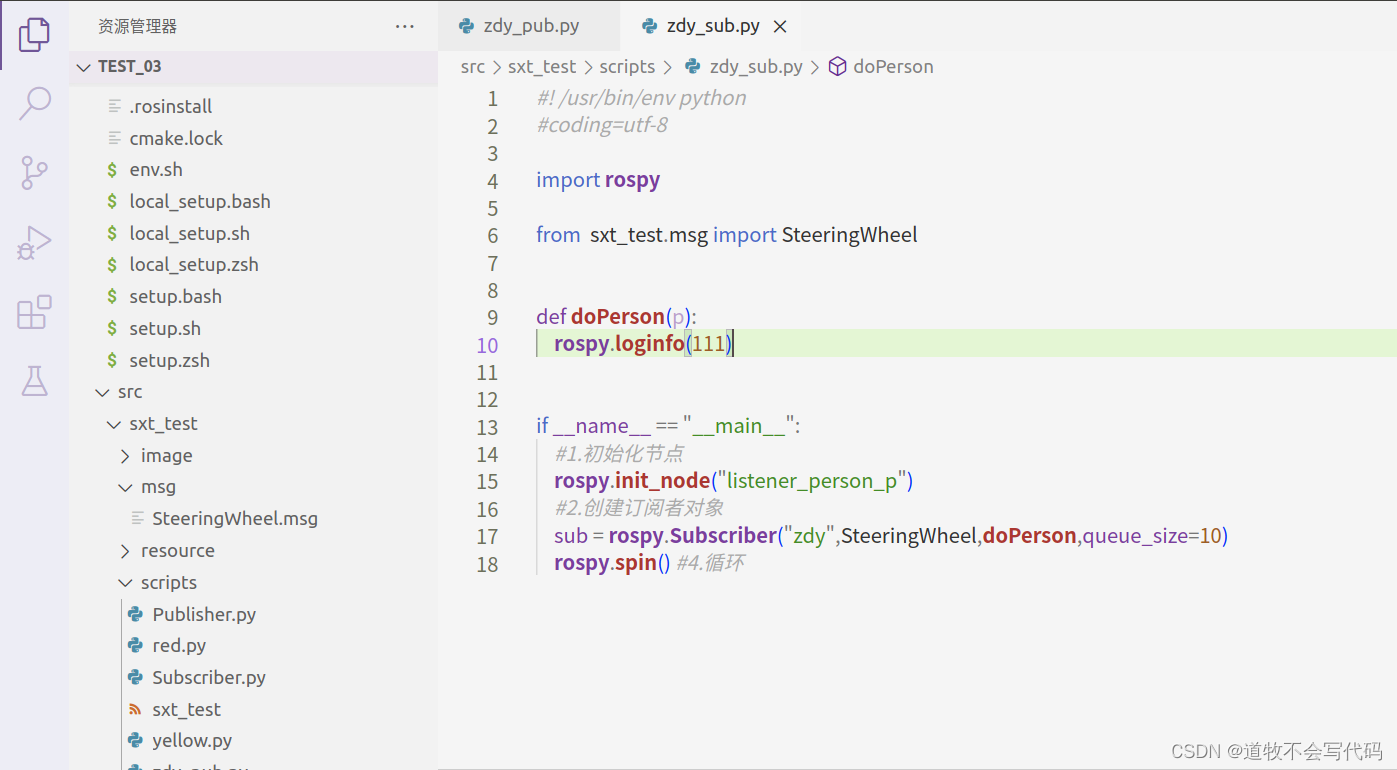
导入例子:

















 2059
2059

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









