










测试边缘化对外参标定的影响
参考VIN-Fusion中原本的vector2double、double2vector和optimization函数,在代码中添加vector2double_ex、double2vector_ex和optimization_ex函数,这部分代码去除边缘化的部分,且仅对外参进行估计并不进行更新,外参标定效果如下
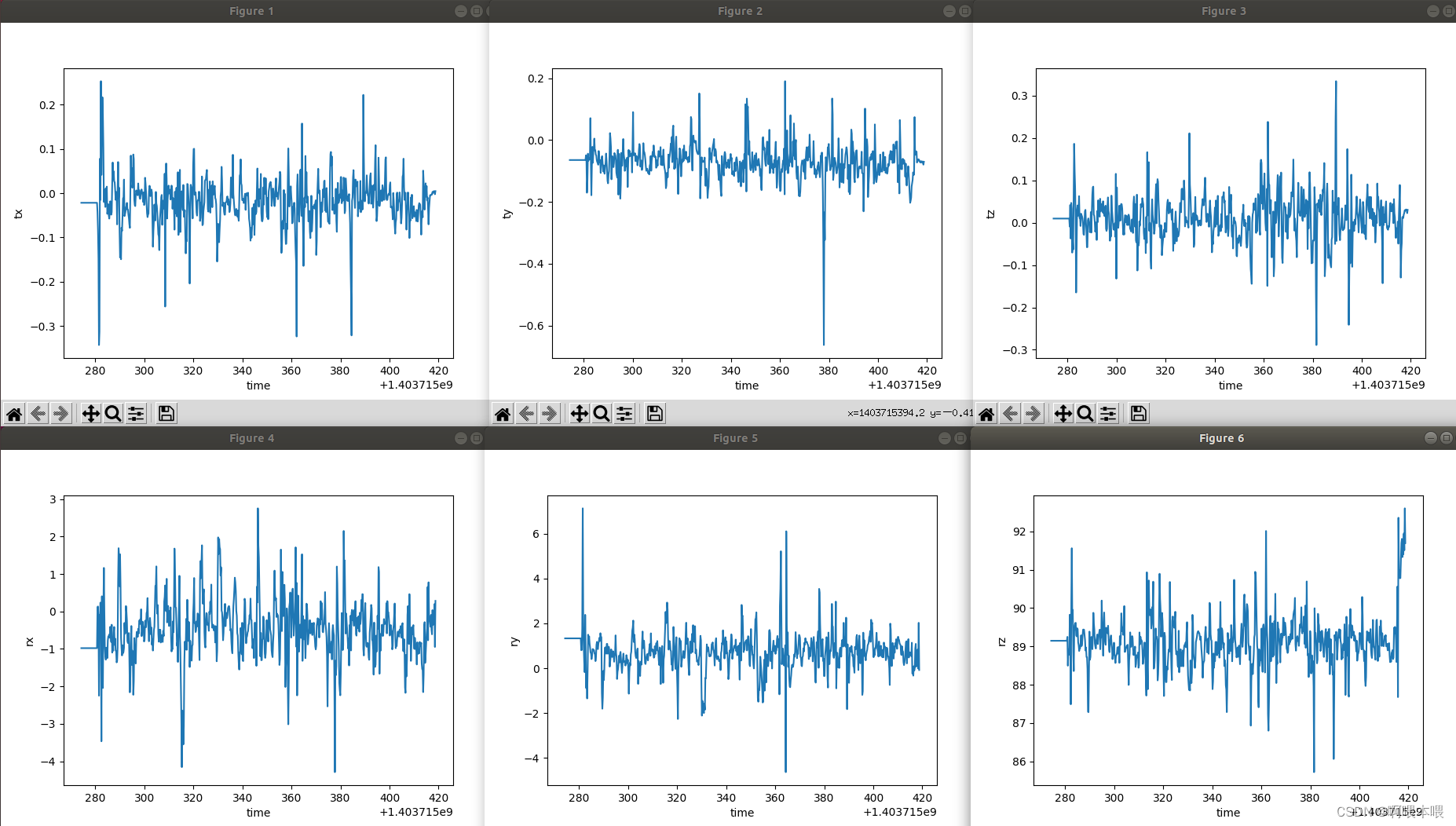
可以看到估计的外参抖动非常严重,原因是很多情况下滑动窗口内的运动不满足外参的可观条件,但是,若仔细观察可以发现,外参变化的趋势与带有边缘化情况下的趋势一致。
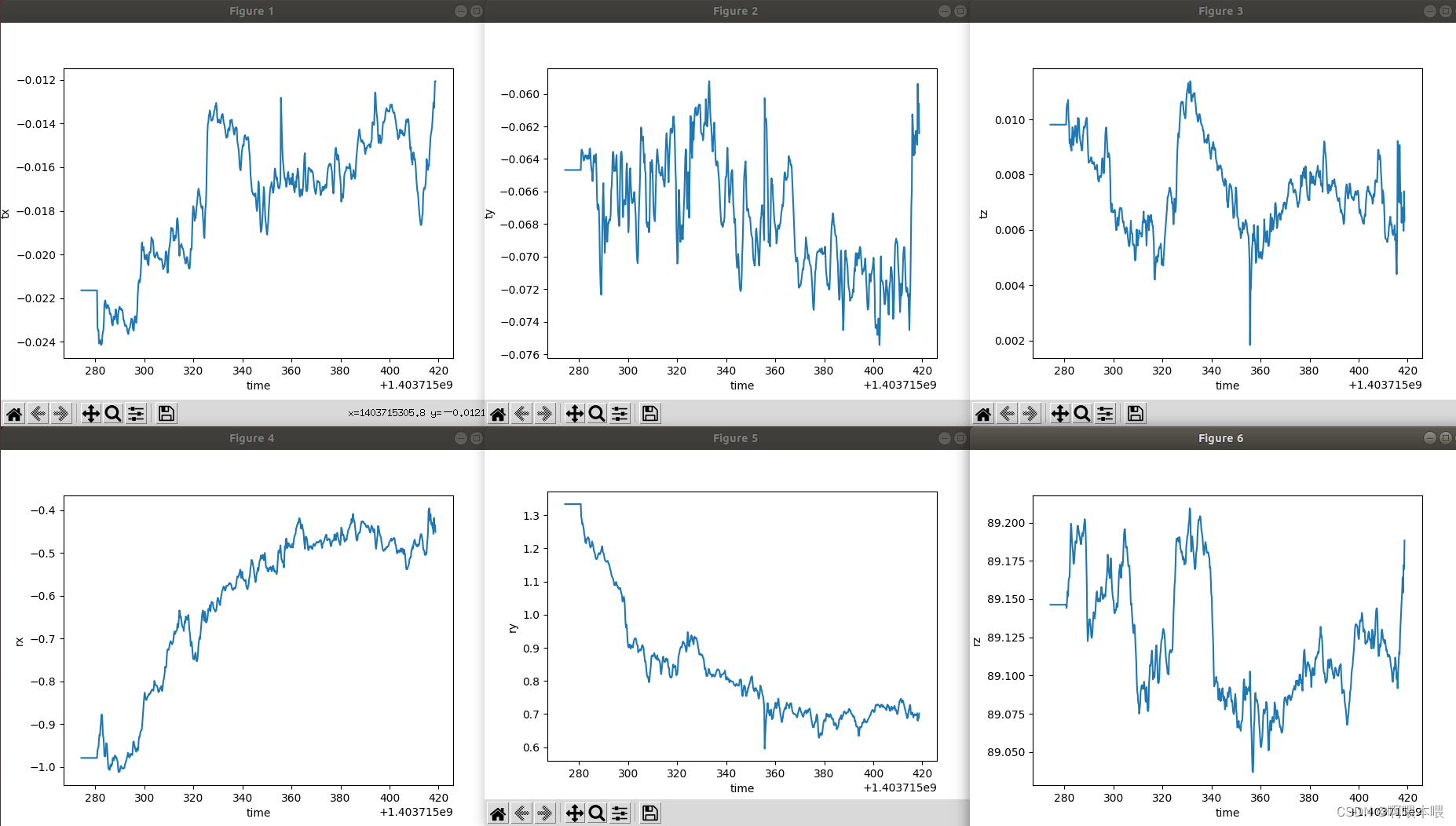
加上 Damping 以后可以更清楚地看到外参变化的趋势。
与Open-VINS进行比较
Open-VINS不支持omni模型,因此比对时与VINS-Fusion都使用官方提供的Pinhole模型内参。下面第一张为Open-VINS估计趋势,第二张为VINS-Fusion估计趋势。
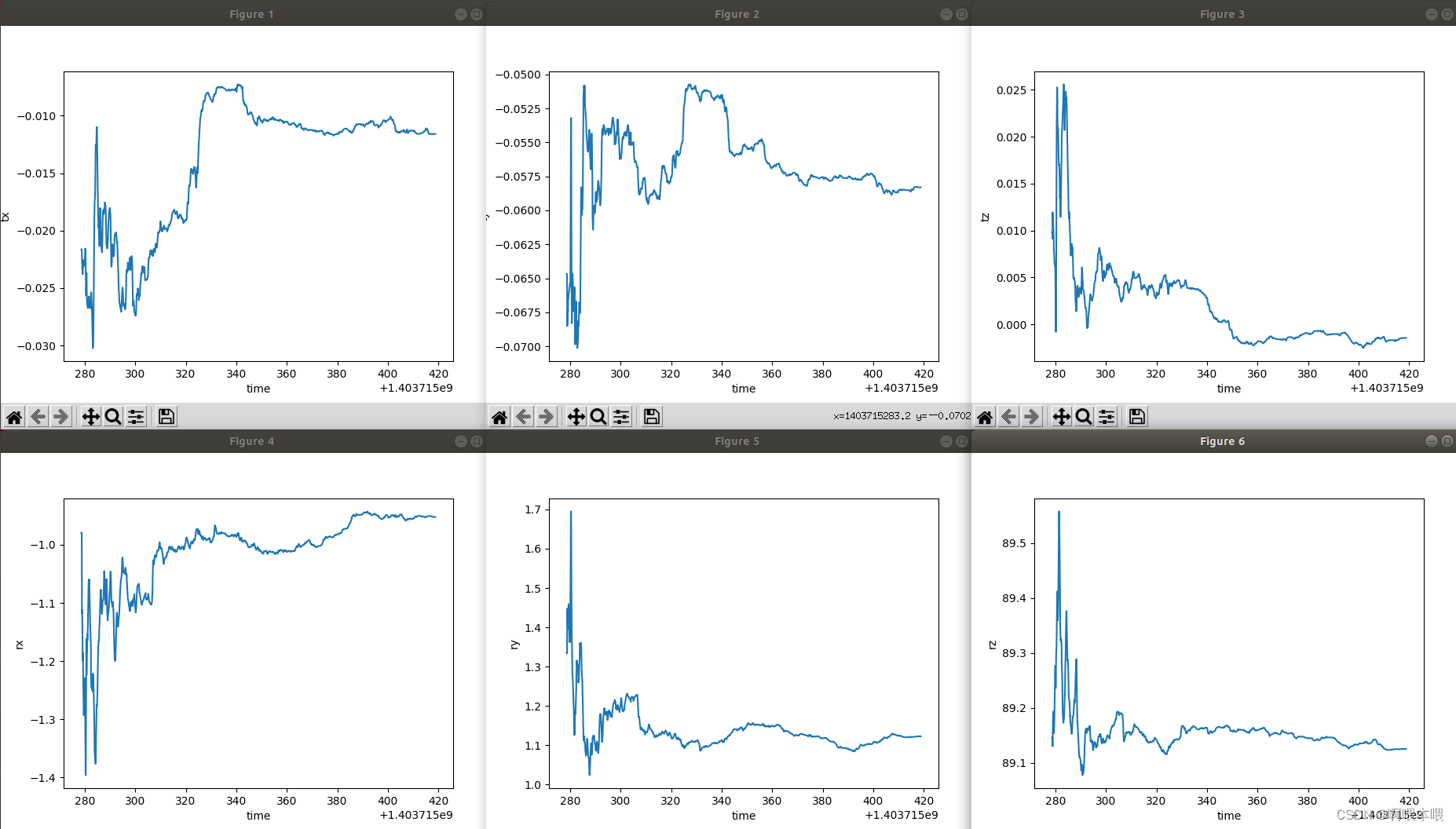
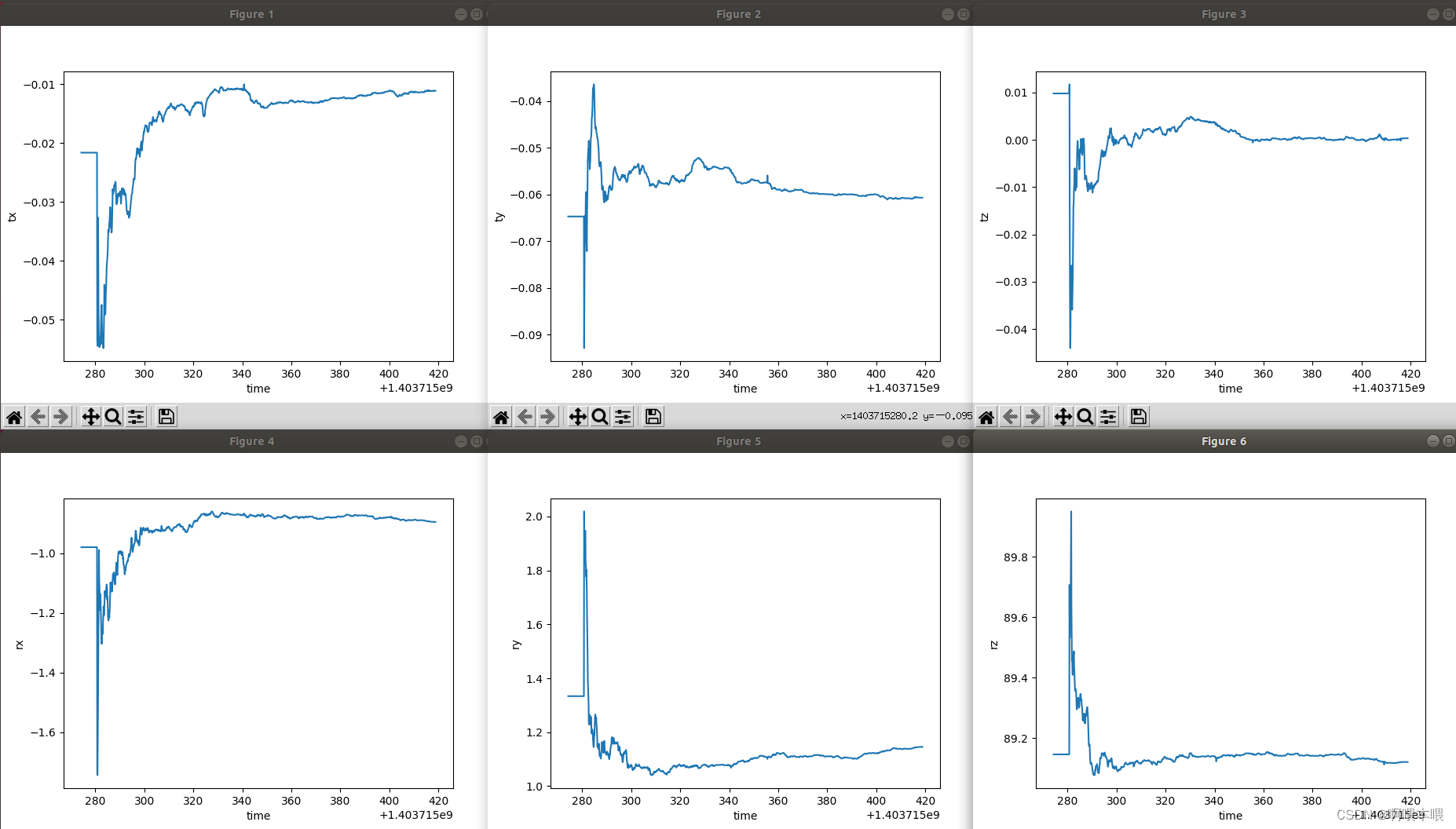
对比上面两张图,不难发现 Open-VINS 和 VINS-Fusion 在线估计的外参收敛到了近似的值,另外,即使给初始外参加上很大的扰动,也能收敛到近似的值,所以初步判断估计结果有一定可信性。然而尽管使用的是官方相机内参,估计出的外参与官方提供的外参仍有比较大的差别。因此,进一步验证两套外参下 VINS-Fusion 跑出来的轨迹的精度,结果发现两套外参下轨迹的精度没有明显差别,不排除均为局部最优的可能性。

















 2059
2059

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









