






//LSM6DSL
void processlsm6dslAccGyro(const uint8_t *buffer)
{
int16_t gx1 = (((int16_t) buffer[1]) << 8) | buffer[0];
int16_t gy1 = -((((int16_t) buffer[3]) << 8) | buffer[2]);
int16_t gz1 = (((int16_t) buffer[5]) << 8) | buffer[4];
int16_t ax1 = (((int16_t) buffer[7]) << 8) | buffer[6];
int16_t ay1 = -((((int16_t) buffer[9]) << 8) | buffer[8]);
int16_t az1 = (((int16_t) buffer[11]) << 8) | buffer[10];
accRaw1.x = ax1;/*用于传到上位机*/
accRaw1.y = ay1;
accRaw1.z = az1;
gyroRaw1.x = gx1;
gyroRaw1.y = gy1;
gyroRaw1.z = gz1;
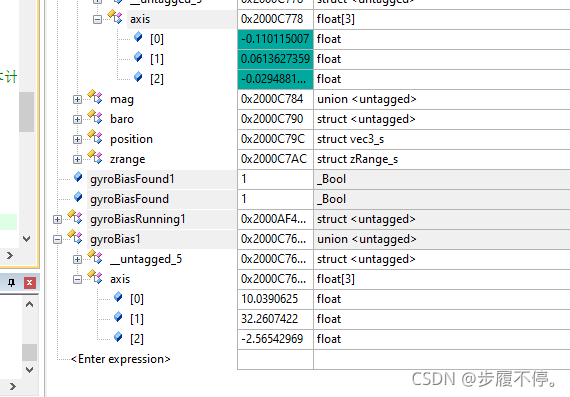
gyroBiasFound1 = processGyroBias1(gx1, gy1, gz1, &gyroBias1);
if (gyroBiasFound1)
{
processAccScale(ax1, ay1, az1);
}
sensors1.gyro.x = -(gx1 - gyroBias1.x)* SENSORS_DEG_PER_LSB_CFG_LSM;
sensors1.gyro.y = (gy1 - gyroBias1.y)* SENSORS_DEG_PER_LSB_CFG_LSM;
sensors1.gyro.z = (gz1 - gyroBias1.z)* SENSORS_DEG_PER_LSB_CFG_LSM;
applyAxis3fLpf(gyroLpf1, &sensors1.gyro);
sensors1.acc.x = -(ax1) * SENSORS_G_PER_LSB_CFG / accScale; / g(9.8m/s^2)*/
sensors1.acc.y = (ay1) * SENSORS_G_PER_LSB_CFG / accScale;
sensors1.acc.z = (az1) * SENSORS_G_PER_LSB_CFG / accScale;
applyAxis3fLpf(accLpf1, &sensors1.acc);
LDS_a[0] = accRaw1.x;
LDS_a[1] = accRaw1.y;
LDS_a[2] = accRaw1.z;
LDS_g[0] = gyroRaw1.x;
LDS_g[1] = gyroRaw1.y;
LDS_g[2] = gyroRaw1.z;
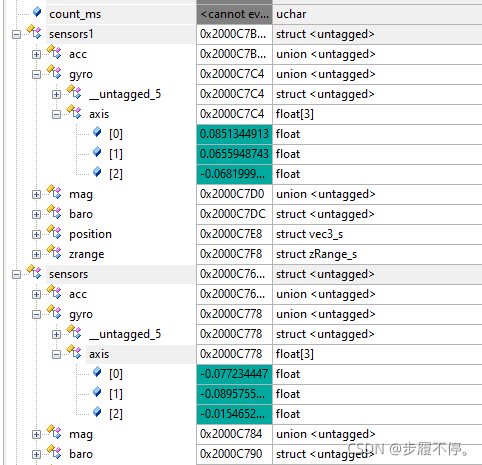
} sensors1.gyro.x
sensors1.gyro.y
sensors1.gyro.z
QUESTION:
LSM6DSL
sensors1.gyro.x
sensors1.gyro.y
sensors1.gyro.z出来的数据不对
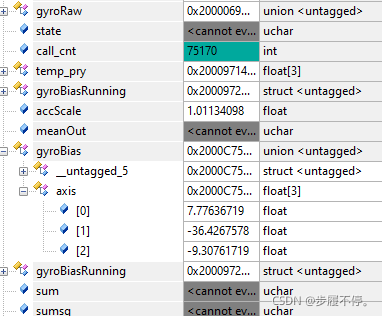
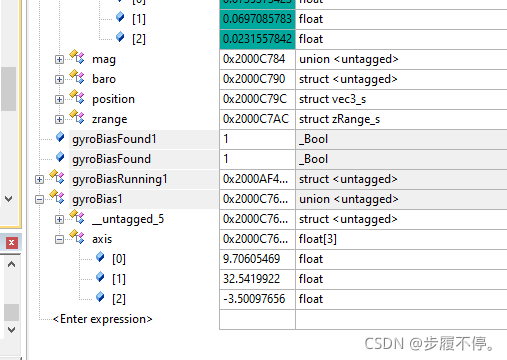
思考:sensors1.gyro.x与(gx1 - gyroBias1.x)有关,实时值正确,说明gyroBias1.x有问题。
gyroBias1.x是由
gyroBiasFound = processGyroBias(gx, gy, gz, &gyroBias);
//计算陀螺方差得出的。
进入的值为gyro的实时值gyroRaw1,出来为结构体指针gyroBiasOut,
所以赋值为gyroBiasOut->x=(*gyroBiasOut).x。
static bool processGyroBias1(int16_t gx1, int16_t gy1, int16_t gz1, Axis3f *gyroBiasOut1)
{
sensorsAddBiasValue(&gyroBiasRunning1, gx1, gy1, gz1);
if (!gyroBiasRunning1.isBiasValueFound)
{
sensorsFindBiasValue1(&gyroBiasRunning1);
}
gyroBiasOut1->x = gyroBiasRunning.bias.x;
gyroBiasOut1->y = gyroBiasRunning.bias.y;
gyroBiasOut1->z = gyroBiasRunning.bias.z;
return gyroBiasRunning1.isBiasValueFound;
}
processGyroBias()函数先进入sensorsAddBiasValue()
gx/gy/gz进入sensorsAddBiasValue(),将其值储存在指针Axis3i16* bufHead中,并且累加。
如果bias储存在bufHead中的值大于1024个,那么buffer满了,重新计数。
static void sensorsAddBiasValue(BiasObj* bias, int16_t x, int16_t y, int16_t z)
{
bias->bufHead->x = x;
bias->bufHead->y = y;
bias->bufHead->z = z;
bias->bufHead++;
if (bias->bufHead >= &bias->buffer[SENSORS_NBR_OF_BIAS_SAMPLES])
{
bias->bufHead = bias->buffer;
bias->isBufferFilled = true;
}
}如果gyroBiasRunning.isBiasValueFound没被找到,我们需要计算方差和平均值。sensorsFindBiasValue(&gyroBiasRunning);出来的是gyroBiasRunning.bais.x
来找出偏置值
static bool sensorsFindBiasValue1(BiasObj* bias)
{
bool foundbias = false;
if (bias->isBufferFilled)
{
Axis3f mean;
Axis3f variance;
sensorsCalculateVarianceAndMean1(bias, &variance, &mean);
if (variance.x < GYRO_VARIANCE_BASE && variance.y < GYRO_VARIANCE_BASE && variance.z < GYRO_VARIANCE_BASE)
{
bias->bias.x = mean.x;
bias->bias.y = mean.y;
bias->bias.z = mean.z;
foundbias = true;
bias->isBiasValueFound= true;
}else
bias->isBufferFilled=false;
}
return foundbias;
}//计算方差和平均值。
sensorsCalculateVarianceAndMean(BiasObj* bias, Axis3f* varOut, Axis3f* meanOut)
进入的是gyroBiasRunning.bais.x,出来的是方差和平均值,看计算出来的方差是否小于40000,小于的话将平均值赋给gyroBiasRunning.bais.x,输出gyrobias(平均值)
int64_t sum[3] = {0};
int64_t sumsq[3] = {0};
static void sensorsCalculateVarianceAndMean1(BiasObj* bias1, Axis3f* varOut1, Axis3f* meanOut1)
{
u32 i;
//int64_t sum[3] = {0};
//int64_t sumsq[3] = {0};
for (i = 0; i < SENSORS_NBR_OF_BIAS_SAMPLES; i++)
{
sum1[0] += bias1->buffer[i].x;
sum1[1] += bias1->buffer[i].y;
sum1[2] += bias1->buffer[i].z;
sumsq1[0] += bias1->buffer[i].x * bias1->buffer[i].x;
sumsq1[1] += bias1->buffer[i].y * bias1->buffer[i].y;
sumsq1[2] += bias1->buffer[i].z * bias1->buffer[i].z;
}
varOut1->x = (sumsq1[0] - ((int64_t)sum1[0] * sum1[0]) / SENSORS_NBR_OF_BIAS_SAMPLES);
varOut1->y = (sumsq1[1] - ((int64_t)sum1[1] * sum1[1]) / SENSORS_NBR_OF_BIAS_SAMPLES);
varOut1->z = (sumsq1[2] - ((int64_t)sum1[2] * sum1[2]) / SENSORS_NBR_OF_BIAS_SAMPLES);
meanOut1->x = (float)sum1[0] / SENSORS_NBR_OF_BIAS_SAMPLES;
meanOut1->y = (float)sum1[1] / SENSORS_NBR_OF_BIAS_SAMPLES;
meanOut1->z = (float)sum1[2] / SENSORS_NBR_OF_BIAS_SAMPLES;
}QUESTION :
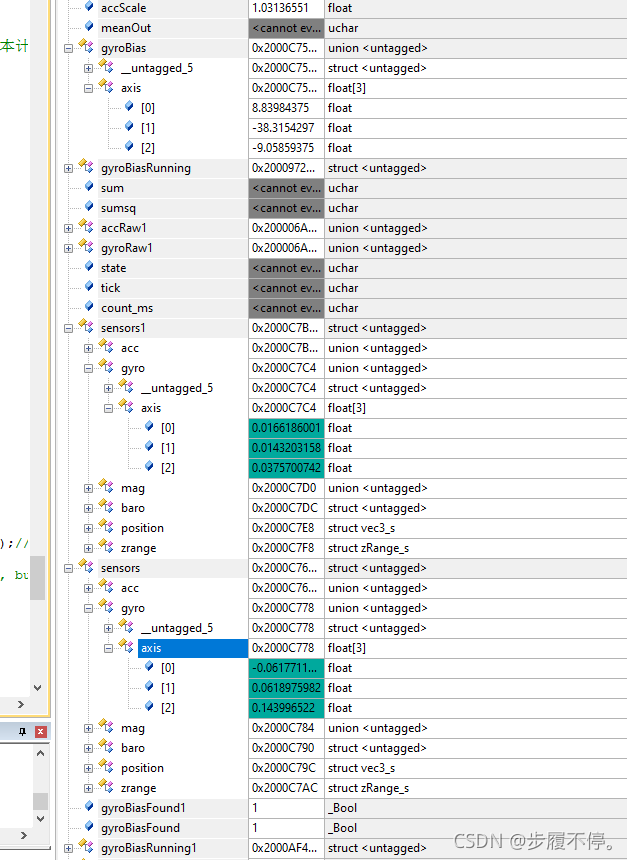
1.是将int64_t sum[3] = {0};int64_t sumsq[3] = {0};定义成了全局变量的原因?
还是计算出的平均值方差混掉了?
答:gyro的数据混乱的原因是因为int64_t sum[3] = {0};int64_t sumsq[3] = {0};被定义成了全局变量,重复使用,导致计算的方差和平均值是错误的。

sum2方案
gyroBiasFound1 = processGyroBias1(gx1, gy1, gz1, &gyroBias1);//新 重新定义一个函数来找偏置
sensorsAddBiasValue(&gyroBiasRunning1, gx1, gy1, gz1);//不变 调用的sensorsAddBiasValue()不用变
sensorsFindBiasValue(&gyroBiasRunning1);
//不变 调用的sensorsFindBiasValue()不用变,直接使用
sensorsCalculateVarianceAndMean(bias, &variance, &mean);//不变
或者
sum方案
gyroBiasFound1 = processGyroBias1(gx1, gy1, gz1, &gyroBias1);//新 重新定义一个函数来找偏置
sensorsAddBiasValue(&gyroBiasRunning1, gx1, gy1, gz1);//不变 调用的sensorsAddBiasValue()不用变
sensorsFindBiasValue1(&gyroBiasRunning1);//新 重新定义一个函数来找偏置,然后再重新定义函数找方差和平均值
sensorsCalculateVarianceAndMean1(bias, &variance, &mean);//新
2.我们将
static void sensorsCalculateVarianceAndMean1(BiasObj* bias1, Axis3f* varOut1, Axis3f* meanOut1)
改为
static void sensorsCalculateVarianceAndMean1(BiasObj* bias, Axis3f* varOut1, Axis3f* meanOut1)
可以输出对的数据吗?
答:不可以,在sum为全局变量的前提下必须重新定义一个bias1来区分进入函数的值。
3.将xxxx1()里的bias全部调用成bias1,是否依旧可以出来值?
答:可以,但是最复杂,没必要。

















 976
976

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









