




 这篇博客记录了作者在实验室中使用Sc-Lego-Loam进行三维建图,并结合NDT匹配实现良好定位效果的过程。16线激光雷达展现出约15~20Hz的定位输出频率,超出了预期。完整代码已上传至Git仓库,可供参考。
这篇博客记录了作者在实验室中使用Sc-Lego-Loam进行三维建图,并结合NDT匹配实现良好定位效果的过程。16线激光雷达展现出约15~20Hz的定位输出频率,超出了预期。完整代码已上传至Git仓库,可供参考。
记录一下实验室日常的生活,sc-lego-loam建图,使用ndt匹配,效果还是不错的,16线速腾,定位有个15~20hz输出(雀氏出乎我滴预料!)。全套代码已push到git仓库了。
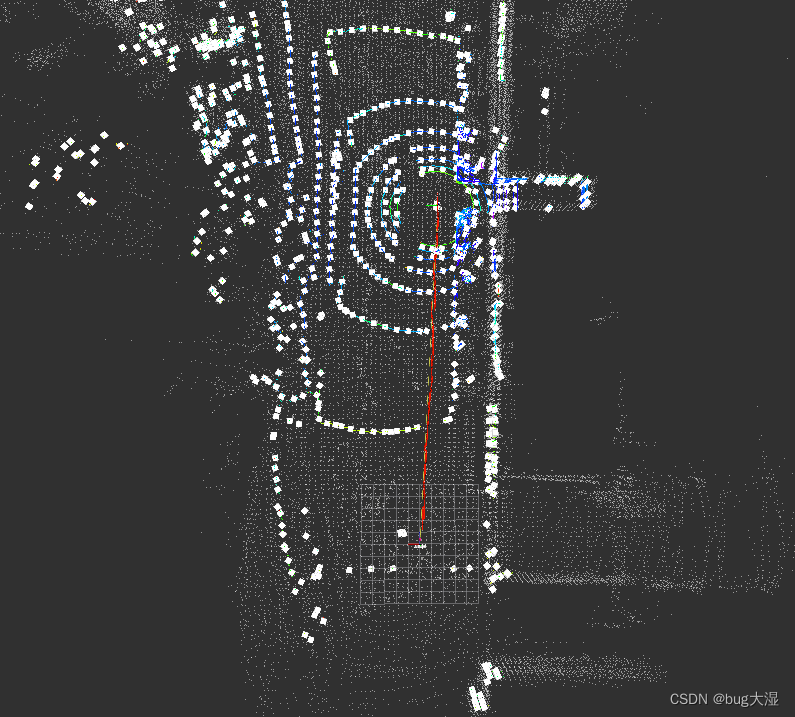
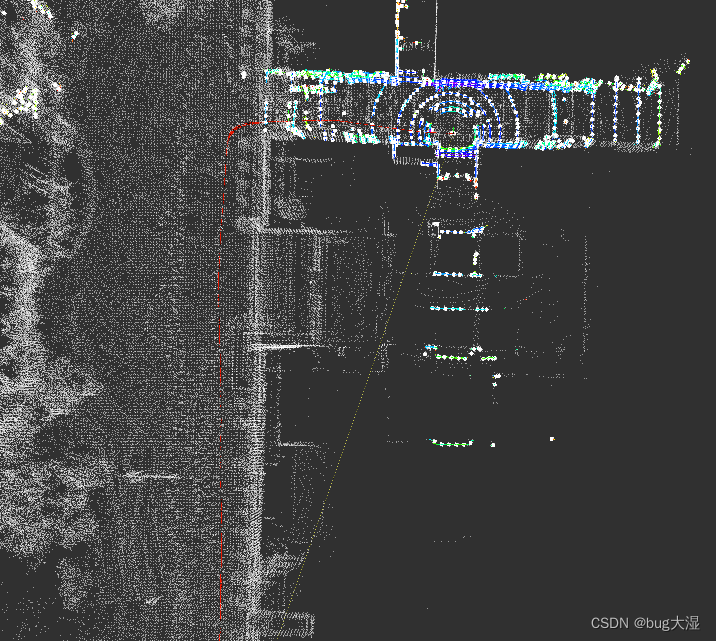
记录一下实验室日常的生活,sc-lego-loam建图,使用ndt匹配,效果还是不错的,16线速腾,定位有个15~20hz输出(雀氏出乎我滴预料!)。全套代码已push到git仓库了。
 4148
5823
4487
8413
2万+
2047
3172
4148
5823
4487
8413
2万+
2047
3172

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























