




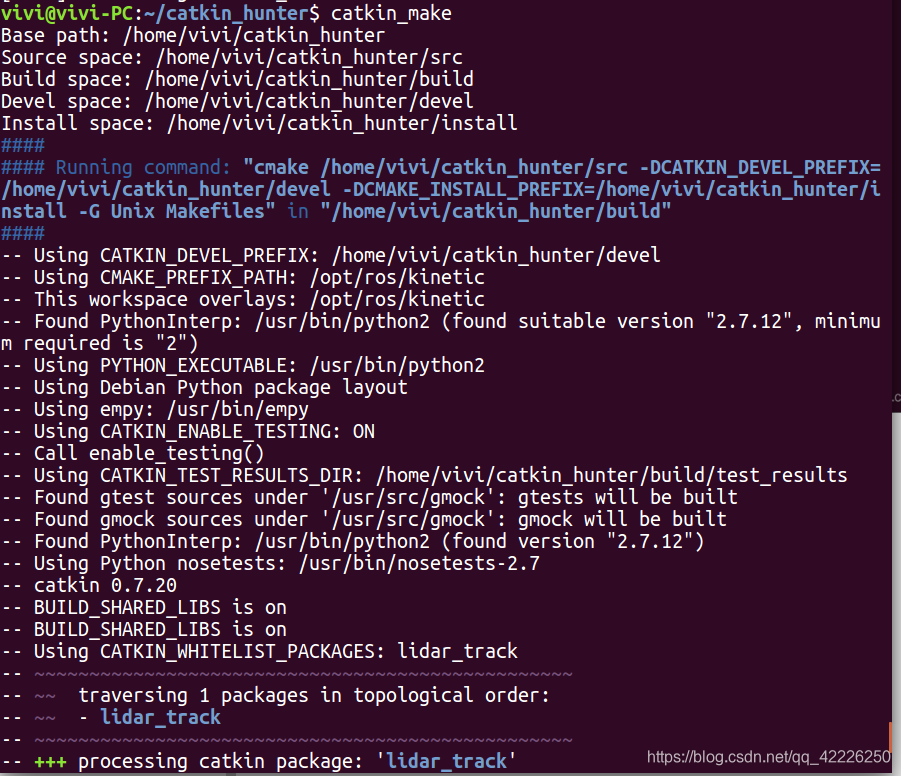
- 全编译
catkin_make
- 单独编译一个包
有时我们写的程序需依赖其他功能包,这时就需要按依赖包的优先级来进行编译了。
catkin_make -DCATKIN_WHITELIST_PACKAGES="package_name"
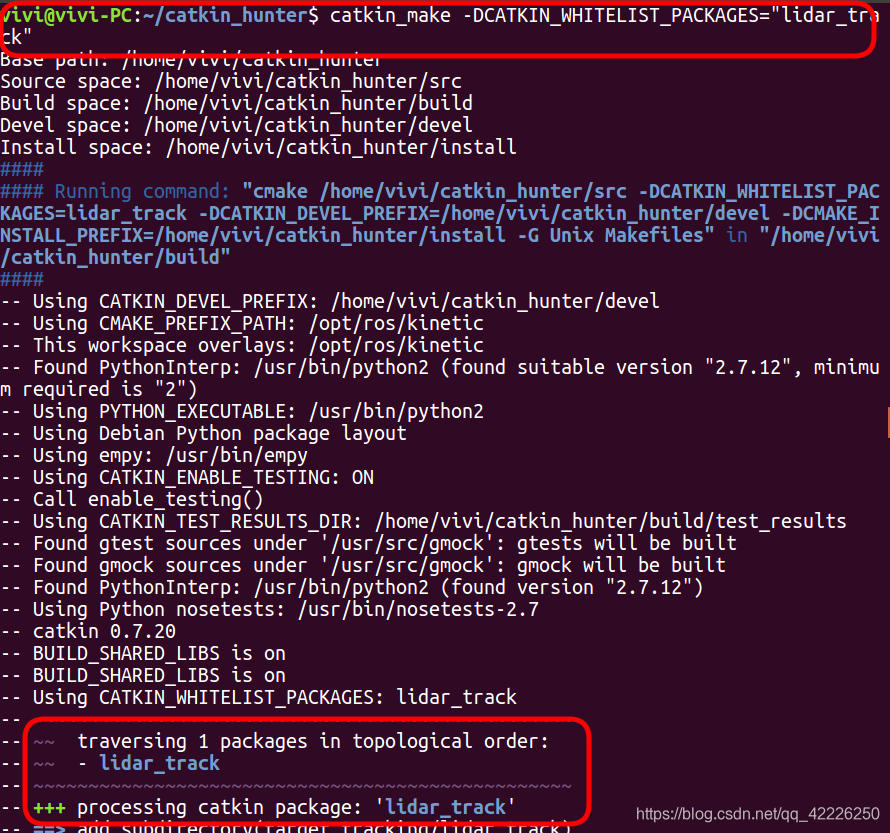
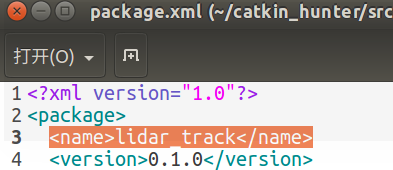
package_name查看CMakeLists.txt和package.xml

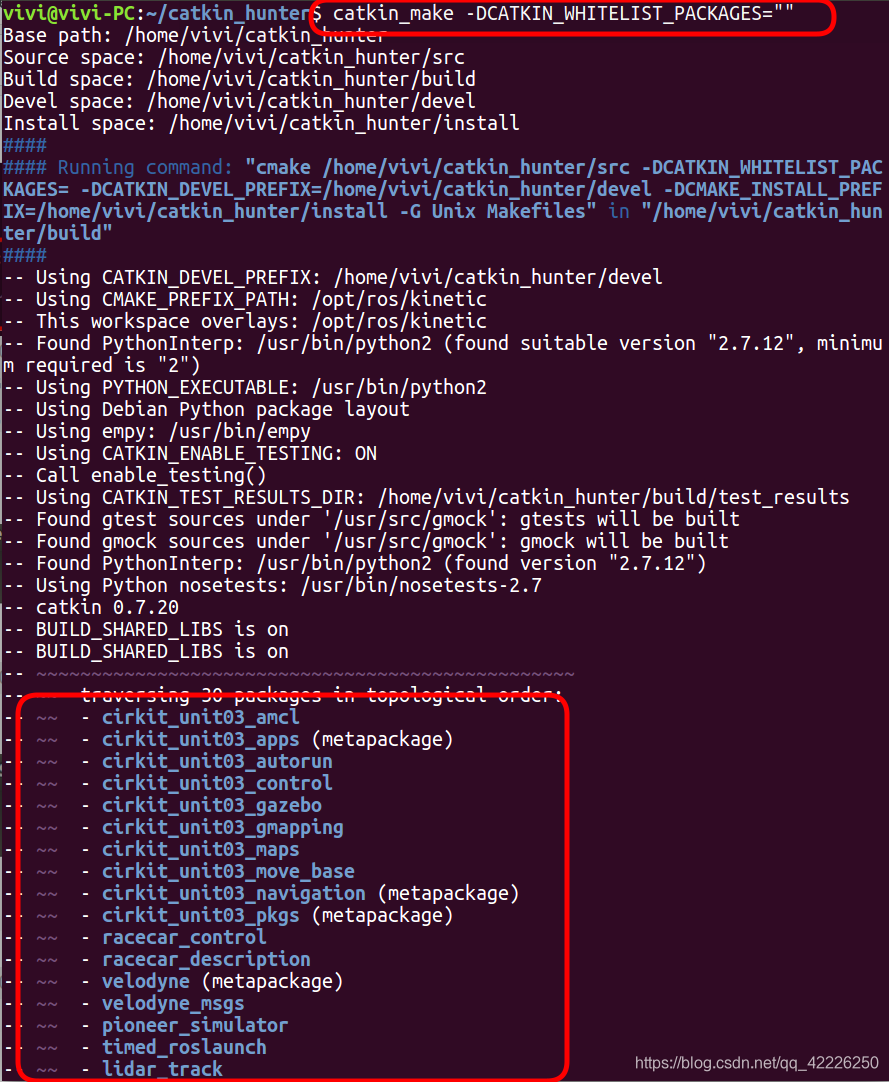
单独编译一个包之后,想要再编译所有的包,需使用下面命令:
catkin_make -DCATKIN_WHITELIST_PACKAGES=""
不能直接使用 catkin_make !!!

















 1447
1447

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









