







 DSVP(Dual-Stage Viewpoint Planner)是一种针对3D环境的快速探索算法,它改进了“Receding Horizon Next-Best-View”规划器。该算法通过动态扩展策略,有效地寻找新的观测点,以提高环境的覆盖率。代码实现包括一个drrtp_node.cpp文件,其中创建了一个drrtPlanner对象,该对象使用drrtp.cpp中的类来管理 octomap、占用栅格和全局图。在初始化过程中,DSVP订阅了传感器数据、状态估计和地形地图,根据接收到的数据更新地图、路径和边界信息。此外,它还定期检查并更新全局和局部边界点,以找到未探索区域。整个过程涉及多个订阅者、发布者和服务,以协调不同模块的交互,实现自主探索。
DSVP(Dual-Stage Viewpoint Planner)是一种针对3D环境的快速探索算法,它改进了“Receding Horizon Next-Best-View”规划器。该算法通过动态扩展策略,有效地寻找新的观测点,以提高环境的覆盖率。代码实现包括一个drrtp_node.cpp文件,其中创建了一个drrtPlanner对象,该对象使用drrtp.cpp中的类来管理 octomap、占用栅格和全局图。在初始化过程中,DSVP订阅了传感器数据、状态估计和地形地图,根据接收到的数据更新地图、路径和边界信息。此外,它还定期检查并更新全局和局部边界点,以找到未探索区域。整个过程涉及多个订阅者、发布者和服务,以协调不同模块的交互,实现自主探索。
写在前面
论文:DSVP: Dual-Stage Viewpoint Planner for Rapid Exploration by Dynamic Expansion
该文章对“Receding Horizon "Next-Best-View" Planner for 3D Exploration”进行改进
 https://github.com/HongbiaoZ/dsv_planner
https://github.com/HongbiaoZ/dsv_planner代码解析 :
首先查看launch文件:
<launch> <arg name="enable_bag_record" default="false"/> <arg name="bag_name" default="dsvp_garage"/> <arg name="simulation" default="false"/> <arg name="use_boundary" default="false"/> <arg name="planner_param_file" default="$(find dsvp_launch)/config/exploration.yaml" /> <arg name="octomap_param_file" default="$(find dsvp_launch)/config/octomap.yaml" /> <rosparam command="load" file="$(arg planner_param_file)" /> <rosparam command="load" file="$(arg octomap_param_file)" /> <node name="dsvplanner" pkg="dsvplanner" type="dsvplanner" output="screen" /> <group if="$(arg use_boundary)"> <node pkg="dsvp_launch" type="navigationBoundary" name="navigationBoundary" output="screen" required="true"> <param name="boundary_file_dir" type="string" value="$(find dsvp_launch)/data/boundary.ply" /> <param name="sendBoundary" type="bool" value="true" /> <param name="sendBoundaryInterval" type="int" value="2" /> </node> </group> <node name="exploration" pkg="dsvp_launch" type="exploration" output="screen" > <param name="simulation" type="bool" value="$(arg simulation)" /> </node> <include file="$(find graph_planner)/launch/graph_planner.launch"/> <group if="$(arg enable_bag_record)"> <include file="$(find dsvp_launch)/launch/rosbag_record.launch"> <arg name="bag_name" value="$(arg bag_name)" /> </include> </group> <node pkg="rviz" type="rviz" name="dsvp_rviz" args="-d $(find dsvp_launch)/default.rviz"/> </launch>从launch文件可以看出,主要执行两个node文件,首先看第一个dsvplanner,其对应的cpp文件为drrtp_node.cpp
drrtp_node.cpp
在该代码中,定义一drrtPlanner对象planner,该对象的具体实现在drrtp.cpp中
#include <eigen3/Eigen/Dense>
#include <ros/ros.h>
#include <dsvplanner/drrtp.h>
int main(int argc, char** argv)
{
ros::init(argc, argv, "nbvPlanner");
ros::NodeHandle nh;
ros::NodeHandle nh_private("~");
dsvplanner_ns::drrtPlanner planner(nh, nh_private);
ros::spin();
return 0;
}drrtp.cpp
首先看该对象的构造函数
dsvplanner_ns::drrtPlanner::drrtPlanner(const ros::NodeHandle &nh,
const ros::NodeHandle &nh_private)
: nh_(nh), nh_private_(nh_private) {
manager_ = new volumetric_mapping::OctomapManager(nh_, nh_private_);
grid_ = new OccupancyGrid(nh_, nh_private_);
dual_state_graph_ = new DualStateGraph(nh_, nh_private_, manager_, grid_);
dual_state_frontier_ = new DualStateFrontier(nh_, nh_private_, manager_, grid_);
drrt_ = new Drrt(manager_, dual_state_graph_, dual_state_frontier_, grid_);
init();
drrt_->setParams(params_);
drrt_->init();
ROS_INFO("Successfully launched DSVP node");
}1. 构造函数中首先定义了4个对象:
1.1 manager_对象
manager_ = new volumetric_mapping::OctomapManager(nh_, nh_private_);namespace volumetric_mapping {
OctomapManager::OctomapManager(const ros::NodeHandle &nh,
const ros::NodeHandle &nh_private)
: nh_(nh), nh_private_(nh_private), world_frame_("map"),
velodyne_cloud_topic_("/velodyne_cloud_topic"), robot_frame_("velodyne"),
use_tf_transforms_(true), latch_topics_(true),
timestamp_tolerance_ns_(10000000), Q_initialized_(false),
Q_(Eigen::Matrix4d::Identity()), map_publish_frequency_(0.0) {
setParametersFromROS();
subscribe();
advertiseServices();
advertisePublishers();
// After creating the manager, if the octomap_file parameter is set,
// load the octomap at that path and publish it.
std::string octomap_file;
if (nh_private_.getParam("octomap_file", octomap_file)) {
if (loadOctomapFromFile(octomap_file)) {
ROS_INFO_STREAM(
"Successfully loaded octomap from path: " << octomap_file);
publishAll();
} else {
ROS_ERROR_STREAM("Could not load octomap from path: " << octomap_file);
}
}
}subscribe():
void OctomapManager::subscribe() {
pointcloud_sub_ = nh_.subscribe(velodyne_cloud_topic_, 1, &OctomapManager::insertPointcloudWithTf, this);
octomap_sub_ = nh_.subscribe("input_octomap", 1, &OctomapManager::octomapCallback, this);
}velodyne_cloud_topic_: /sensor_scan(lidar坐标系下的点云)
回调函数1:insertPointcloudWithTf(得到sensor坐标系到世界坐标系的变换,并将变换转换至相应格式)、光线追踪更新地图
void OctomapManager::insertPointcloudWithTf(
const sensor_msgs::PointCloud2::ConstPtr &pointcloud) {
// Look up transform from sensor frame to world frame.
Transformation sensor_to_world;
if (lookupTransform(pointcloud->header.frame_id, world_frame_,
pointcloud->header.stamp, &sensor_to_world)) {
insertPointcloud(sensor_to_world, pointcloud);
}
}lookupTransformTf实现:
1. pointcloud->header.frame_id为:/sensor_at_scan 在sensor_scan_generation功能包中定义;
2. world_frame_:/map
bool OctomapManager::lookupTransform(const std::string &from_frame,
const std::string &to_frame,
const ros::Time ×tamp,
Transformation *transform) {
if (use_tf_transforms_) {
return lookupTransformTf(from_frame, to_frame, timestamp, transform);
} else {
return lookupTransformQueue(from_frame, to_frame, timestamp, transform);
}
}bool OctomapManager::lookupTransformTf(const std::string &from_frame,
const std::string &to_frame,
const ros::Time ×tamp,
Transformation *transform) {
tf::StampedTransform tf_transform;
ros::Time time_to_lookup = timestamp;
// If this transform isn't possible at the time, then try to just look up
// the latest (this is to work with bag files and static transform publisher,
// etc).
if (!tf_listener_.canTransform(to_frame, from_frame, time_to_lookup)) {
ros::Duration timestamp_age = ros::Time::now() - time_to_lookup;
if (timestamp_age < tf_listener_.getCacheLength()) {
time_to_lookup = ros::Time(0);
// ROS_WARN("Using latest TF transform instead of timestamp match.");
} else {
// ROS_ERROR("Requested transform time older than cache limit.");
return false;
}
}
try {
tf_listener_.lookupTransform(to_frame, from_frame, time_to_lookup,
tf_transform);
} catch (tf::TransformException &ex) {
ROS_ERROR_STREAM(
"Error getting TF transform from sensor data: " << ex.what());
return false;
}
tf::transformTFToKindr(tf_transform, transform);
return true;
}void transformTFToKindr(const tf::Transform& tf_type,
kindr::minimal::QuatTransformation* kindr) {
CHECK_NOTNULL(kindr);
Eigen::Vector3d position;
Eigen::Quaterniond rotation;
quaternionTFToKindr(tf_type.getRotation(), &rotation);
vectorTFToKindr(tf_type.getOrigin(), &position);
// Enforce positive w.
if (rotation.w() < 0) {
rotation.coeffs() = -rotation.coeffs();
}
*kindr = kindr::minimal::QuatTransformation(rotation, position);
}即进行类型转换(tf_transform--transform(得到rotation和position))
insertPointcloud(sensor_to_world, pointcloud):实现的是通过对当前帧点云中的每一个点光线追踪来更新free_cells和occupied_cells
回调函数2: octomapCallback(这个暂时先不看它 )
1.2 grid_对象
grid_ = new OccupancyGrid(nh_, nh_private_);该对象的实现:
OccupancyGrid::OccupancyGrid(const ros::NodeHandle &nh, const ros::NodeHandle &nh_private)
: nh_(nh), nh_private_(nh_private) {
initialize();
}bool OccupancyGrid::initialize() {
// Read in parameters
if (!readParameters())
return false;
// Initialize subscriber
odom_sub_.subscribe(nh_, sub_odom_topic_, 1);
terrain_point_cloud_sub_.subscribe(nh_, sub_terrain_point_cloud_topic_, 1);
sync_.reset(new Sync(syncPolicy(100), odom_sub_, terrain_point_cloud_sub_));
sync_->registerCallback( boost::bind(&OccupancyGrid::terrainCloudAndOdomCallback, this, _1, _2));
grid_cloud_pub_ = nh_.advertise<sensor_msgs::PointCloud2>(pub_grid_points_topic_, 1);
map_half_width_grid_num_ = int(kMapWidth / 2 / kGridSize); // 40/2/0.1
map_width_grid_num_ = map_half_width_grid_num_ * 2 + 1;
clearGrid();
ROS_INFO("Successfully launched OccupancyGrid node");
return true;
}初始化一些参数以及订阅/state_estimation和/terrain_map_ext,执行回调函数terrainCloudAndOdomCallback
void OccupancyGrid::terrainCloudAndOdomCallback(
const nav_msgs::Odometry::ConstPtr &odom_msg,
const sensor_msgs::PointCloud2::ConstPtr &terrain_msg) {
terrain_time_ = terrain_msg->header.stamp;
robot_position_[0] = odom_msg->pose.pose.position.x;
robot_position_[1] = odom_msg->pose.pose.position.y;
robot_position_[2] = odom_msg->pose.pose.position.z;
terrain_cloud_->clear();
terrain_cloud_ds->clear();
terrain_cloud_traversable_->clear();
terrain_cloud_obstacle_->clear();
pcl::fromROSMsg(*terrain_msg, *terrain_cloud_);
pcl::VoxelGrid<pcl::PointXYZI> point_ds;
point_ds.setLeafSize(kDownsampleSize, kDownsampleSize, kDownsampleSize);
point_ds.setInputCloud(terrain_cloud_);
// 地形消息下采样
point_ds.filter(*terrain_cloud_ds);
pcl::PointXYZI point;
int terrainCloudSize = terrain_cloud_ds->points.size();
for (int i = 0; i < terrainCloudSize; i++) {
point.x = terrain_cloud_ds->points[i].x;
point.y = terrain_cloud_ds->points[i].y;
point.z = terrain_cloud_ds->points[i].z;
point.intensity = terrain_cloud_ds->points[i].intensity;
// crop all ground points
// 0.2m到1m之间的障碍物认为是obstacle,(kObstacleHeightThre默认0.2)
if (point.intensity > kObstacleHeightThre && point.intensity < kFlyingObstacleHeightThre) {
terrain_cloud_obstacle_->push_back(point);
} else if (point.intensity <= kObstacleHeightThre) {
terrain_cloud_traversable_->push_back(point);
}
}
clearGrid(); // grid全部填充为unknown状态
updateGrid();
publishGridMap();
}void OccupancyGrid::updateGrid() {
pcl::PointXYZI point;
for (int i = 0; i < terrain_cloud_obstacle_->points.size(); i++) {
point = terrain_cloud_obstacle_->points[i];
// 将障碍物点换算成索引
// kGridSize = 0.1
int indX = int((point.x - robot_position_[0] + kGridSize / 2) / kGridSize) + map_half_width_grid_num_;
int indY = int((point.y - robot_position_[1] + kGridSize / 2) / kGridSize) + map_half_width_grid_num_;
// 应对负数四舍五入情况
if (point.x - robot_position_[0] + kGridSize / 2 < 0)
indX--;
if (point.y - robot_position_[1] + kGridSize / 2 < 0)
indY--;
if (indX < 0)
indX = 0;
if (indY < 0)
indY = 0;
if (indX > map_width_grid_num_ - 1)
indX = map_width_grid_num_ - 1;
if (indY > map_width_grid_num_ - 1)
indY = map_width_grid_num_ - 1;
if (indX >= 0 && indX < map_width_grid_num_ && indY >= 0 && indY < map_width_grid_num_) {
gridStatus grid_state = occupied;
gridState_[indX][indY] = grid_state;
}
}
for (int i = 0; i < terrain_cloud_traversable_->points.size(); i++) {
point = terrain_cloud_traversable_->points[i];
int indX = int((point.x - robot_position_[0] + kGridSize / 2) / kGridSize) + map_half_width_grid_num_;
int indY = int((point.y - robot_position_[1] + kGridSize / 2) / kGridSize) + map_half_width_grid_num_;
if (point.x - robot_position_[0] + kGridSize / 2 < 0)
indX--;
if (point.y - robot_position_[1] + kGridSize / 2 < 0)
indY--;
if (indX < 0)
indX = 0;
if (indY < 0)
indY = 0;
if (indX > map_width_grid_num_ - 1)
indX = map_width_grid_num_ - 1;
if (indY > map_width_grid_num_ - 1)
indY = map_width_grid_num_ - 1;
if (indX >= 0 && indX < map_width_grid_num_ && indY >= 0 && indY < map_width_grid_num_) {
if (gridState_[indX][indY] == 2) {
continue;
}
if (updateFreeGridWithSurroundingGrids(indX, indY) == false) {
gridStatus grid_state = free;
gridState_[indX][indY] = grid_state;
} else {
gridStatus grid_state = near_occupied;
gridState_[indX][indY] = grid_state;
}
}
}
}point.x() - robot_position_[0]为当前点到机器人原点的向量
kGridSize默认为0.1,该向量加上kGridSize/2再除以kGridSize再转为int变量,表示四舍五入;
即假设当前点距离机器人2m,栅格的分辨率为0.1,则距离20个格子,再加上map_half_width_grid_num_(200),即这个点再220处。
机器人是地图的中心,一个点在机器人右边20处,那么在整个地图里面,它应该是左边第220个格子。
void OccupancyGrid::publishGridMap() {
grid_cloud_->clear();
pcl::PointXYZI p1;
geometry_msgs::Point p2;
// typedef Vector2i GridIndex;
GridIndex p3;
for (int i = 0; i < map_width_grid_num_; i++) {
for (int j = 0; j < map_width_grid_num_; j++) {
p3[0] = i;
p3[1] = j;
// 返回点
p2 = getPoint(p3);
p1.x = p2.x;
p1.y = p2.y;
p1.z = p2.z;
p1.intensity = gridState_[i][j];
grid_cloud_->points.push_back(p1);
}
}
sensor_msgs::PointCloud2 gridCloud2;
pcl::toROSMsg(*grid_cloud_, gridCloud2);
gridCloud2.header.stamp = terrain_time_;
gridCloud2.header.frame_id = world_frame_id_;
grid_cloud_pub_.publish(gridCloud2);
}1.2 grid_对象总结
grid_定义是仅执行初始化订阅者和发布者以及clearGrid()函数。
订阅/state_estimation以及/terrain_map_ext,执行回调函数,函数内执行以下:将点云中的点划分为四类:unknown , free , occupied , near_occupied ,并将每个点的该信息存储在intensity属性中,并将其以话题/occpancy_grid_map发布出去。
1.3 定义全局图
dual_state_graph_ = new DualStateGraph(nh_, nh_private_, manager_, grid_);dual_state_graph_构造函数:
namespace dsvplanner_ns {
DualStateFrontier::DualStateFrontier(
const ros::NodeHandle &nh, const ros::NodeHandle &nh_private,
volumetric_mapping::OctomapManager *manager, OccupancyGrid *grid)
: nh_(nh), nh_private_(nh_private) {
manager_ = manager;
grid_ = grid;
initialize();
}initialize()函数:
1. 初始化一些参数
2. 定义一些订阅者和发布者
// Initialize subscriber
// sub_keypose_topic_: state_estimation_at_scan
key_pose_sub_ = nh_.subscribe<nav_msgs::Odometry>(sub_keypose_topic_, 5, &DualStateGraph::keyposeCallback, this);
// sub_path_topic_ : /graph_planner_path
graph_planner_path_sub_ = nh_.subscribe<nav_msgs::Path>(sub_path_topic_, 1, &DualStateGraph::pathCallback, this);
// sub_graph_planner_status_topic_ : /graph_planner_status
graph_planner_status_sub_ = nh_.subscribe<graph_planner::GraphPlannerStatus>(sub_graph_planner_status_topic_, 1,
&DualStateGraph::graphPlannerStatusCallback, this);
// Initialize publishers
// pub_local_graph_topic_: /local_graph
local_graph_pub_ = nh_.advertise<graph_utils::TopologicalGraph>(pub_local_graph_topic_, 2);
// pub_global_graph_topic_ : /global_graph
global_graph_pub_ = nh_.advertise<graph_utils::TopologicalGraph>(pub_global_graph_topic_, 2);
// pub_global_points_topic_ : /global_points
graph_points_pub_ = nh_.advertise<sensor_msgs::PointCloud2>(pub_global_points_topic_, 2);发布的/global_graph仅用于显示 。
一. 订阅话题/state_estimation_at_scan(等同于/state_estimation),执行回调函数keyposeCallback
void DualStateGraph::keyposeCallback(const nav_msgs::Odometry::ConstPtr &msg) {
geometry_msgs::Pose keypose;
keypose.position.x = msg->pose.pose.position.x;
keypose.position.y = msg->pose.pose.position.y;
keypose.position.z = msg->pose.pose.position.z;
keypose.orientation.y = 0;
addNewGlobalVertexWithKeypose(keypose);
}即每到一个机器人当前位姿,就执行addNewGlobalVertexWithKeypose()回调函数
void DualStateGraph::addNewGlobalVertexWithKeypose(geometry_msgs::Pose &vertex_msg) {
// Same as addNewLocalVertex but only adds vertex if a similar vertex doesn't already exist
// Extract the point
geometry_msgs::Point new_vertex_location;
new_vertex_location = vertex_msg.position;
// Check if a similar vertex already exists
bool already_exists = false;
bool too_long = false;
double distance = -1;
int closest_vertex_idx = -1;
if (!global_graph_.vertices.empty()) {
closest_vertex_idx = graph_utils_ns::GetClosestVertexIdxToPoint(global_graph_, new_vertex_location);
auto &closest_vertex_location = global_graph_.vertices[closest_vertex_idx].location;
distance = misc_utils_ns::PointXYZDist(new_vertex_location, closest_vertex_location);
if (distance < kMinVertexDist / 2) {
already_exists = true;
}
if (distance > kMaxLongEdgeDist || fabs(new_vertex_location.z - closest_vertex_location.z) > kMaxVertexDiffAlongZ) {
too_long = true;
}
}
}1. 该回调函数接受机器人当前位姿,提取出机器人当前位置信息, 并提取出global_graph_中距离当前点位置最近的点的索引closest_vertex_idx,以及其位置信息closest_vertex_location,
2. 判断当前点和最近的点的距离,如果距离太小或者太大,则忽略当前点。如果距离合适,则执行下面的函数:
// If not, add a new one
if (!already_exists && !too_long) {
prev_track_vertex_idx_ = closest_vertex_idx;
addNewGlobalVertex(vertex_msg);
addGlobalEdgeWithoutCheck(prev_track_keypose_vertex_idx_, track_globalvertex_idx_, true);
prev_track_keypose_vertex_idx_ = track_globalvertex_idx_;
}1. 将距离当前点最近的global_graph_中的点的索引closest_vertex_idx赋给prev_track_vertex_idx_,
2. 执行addNewGlobalVertex(vertex_msg)函数:
2.1 将当前点的position、vertex_id(global_graph_.vertices.size())和information_gain添加到global_graph_中, 得到当前vertex的索引track_globalvertex_idx_,以及指针vertex_new
2.2 当global_graph_中vertex的数量大于1时,定义当前vertex的parrent_idx为prev_track_vertex_idx_,执行函数addGlobalEdgeWithoutCheck(prev_track_vertex_idx_, track_globalvertex_idx_, false)。
2.3 addGlobalEdgeWithoutCheck()函数功能:(在两个vertex之间添加edge)
2.3.1 首先从global_graph_中根据传参的索引获取prev_vertex以及当前vertex并分别定义为start_vertex和end_vertex。
2.3.2 接着检查两个vertex之间是否有edge,如果没有的话,进行添加
2.3.3 首先计算两个vertex之间的距离dist_diff,然后定义两个edge对象:graph_utils::Edge edge_to_start以及graph_utils::Edge edge_to_end;
2.3.4 添加两个edge : edge_to_start.vertex_id_end = start_vertex_idx,edge_to_end.vertex_id_end = end_vertex_idx;其中start_vertex_idx为prev_track_vertex_idx_,end_vertex_idx为track_globalvertex_idx_
2.3.5 计算traversal cost:edge_to_start.traversal_costs = dist_diff,edge_to_end.traversal_costs = dist_diff;
2.3.6 edge_to_start.keypose_edge = trajectory_edge,edge_to_end.keypose_edge = trajectory_edge;此时trajectory_edge传参为false.
2.3.7 将edge添加到vertex中:start_vertex.edges.push_back(edge_to_end),end_vertex.edges.push_back(edge_to_start).
2.4 对当前vertex附近的vertex添加edge:计算global_graph_中每一个vertex距离当前vertex的路基,若小于一定阈值,则执行addGlobalEdge(graph_vertex.vertex_id, vertex_new.vertex_id)函数。
2.4.1 函数声明:void DualStateGraph::addGlobalEdge(int start_vertex_idx, int end_vertex_idx),即start_vertex_idx为满足阈值条件的nearby_vertex以及当前vertex。
2.4.2 计算两个vertex之间的距离dist_edge
2.4.3 接着调用ShortestPathBtwVertex(path, global_graph_, start_vertex_idx, end_vertex_idx)函数:Function for getting the shortest path on a graph between two vertexes;Output a sequence of vertex ids as the path-->path
2.4.4 然后计算path的长度dist_path
2.4.5 进行论文中公式6的判断,若满足条件,同时进行碰撞检测,满足条件者,调用addGlobalEdgeWithoutCheck(),添加边。
2.5 执行addGlobalEdgeWithoutCheck(prev_track_keypose_vertex_idx_, track_globalvertex_idx_, true);
紧接着prev_track_keypose_vertex_idx_ = track_globalvertex_idx_;
void DualStateGraph::addNewGlobalVertex(geometry_msgs::Pose &vertex_msg) {
// Extract the point
geometry_msgs::Point new_vertex_location;
new_vertex_location = vertex_msg.position;
// Create a new vertex
graph_utils::Vertex vertex;
vertex.location = new_vertex_location;
vertex.vertex_id = (int)global_graph_.vertices.size();
vertex.information_gain = vertex_msg.orientation.y;
// Add this vertex to the graph
global_graph_.vertices.push_back(vertex);
track_globalvertex_idx_ = (int)global_graph_.vertices.size() - 1;
auto &vertex_new = global_graph_.vertices[track_globalvertex_idx_];
// If there are already other vertices
if (global_graph_.vertices.size() > 1) {
// Add a parent backpointer to previous vertex
vertex_new.parent_idx = prev_track_vertex_idx_;
// Add an edge to previous vertex
addGlobalEdgeWithoutCheck(prev_track_vertex_idx_, track_globalvertex_idx_, false);
// Also add edges to nearby vertices
for (auto &graph_vertex : global_graph_.vertices) {
// If within a distance
float dist_diff = misc_utils_ns::PointXYZDist(graph_vertex.location, vertex_new.location);
if (dist_diff < kConnectVertexDistMax) {
// Add edge from this nearby vertex to current vertex
addGlobalEdge(graph_vertex.vertex_id, vertex_new.vertex_id);
}
}
} else {
// This is the first vertex -- no edges
vertex.parent_idx = -1;
}
}void DualStateGraph::addGlobalEdgeWithoutCheck(int start_vertex_idx, int end_vertex_idx, bool trajectory_edge) {
// Add an edge in the graph from vertex start_vertex_idx to vertex end_vertex_idx
// Get the two vertices
auto &start_vertex = global_graph_.vertices[start_vertex_idx];
auto &end_vertex = global_graph_.vertices[end_vertex_idx];
// Check if edge already exists -- don't duplicate
for (auto &edge : start_vertex.edges) {
if (edge.vertex_id_end == end_vertex_idx) {
// don't add duplicate edge
edge.keypose_edge = trajectory_edge;
for (auto &edge : end_vertex.edges) {
if (edge.vertex_id_end == start_vertex_idx) {
// don't add duplicate edge
edge.keypose_edge = trajectory_edge;
break;
}
}
return;
}
}
// Compute the distance between the two points
float dist_diff = misc_utils_ns::PointXYZDist(start_vertex.location, end_vertex.location);
// Create two edge objects
graph_utils::Edge edge_to_start;
graph_utils::Edge edge_to_end;
// Join the two edges
edge_to_start.vertex_id_end = start_vertex_idx;
edge_to_end.vertex_id_end = end_vertex_idx;
// Compute the traversal cost
// For now, this is just Euclidean distance
edge_to_start.traversal_costs = dist_diff;
edge_to_end.traversal_costs = dist_diff;
edge_to_start.keypose_edge = trajectory_edge;
edge_to_end.keypose_edge = trajectory_edge;
// Add these two edges to the vertices
start_vertex.edges.push_back(edge_to_end);
end_vertex.edges.push_back(edge_to_start);
globalEdgeSize_++;
}void DualStateGraph::addGlobalEdge(int start_vertex_idx, int end_vertex_idx) {
if (start_vertex_idx == end_vertex_idx) {
return;
}
// Get the edge distance
float dist_edge = misc_utils_ns::PointXYZDist(
global_graph_.vertices[start_vertex_idx].location,
global_graph_.vertices[end_vertex_idx].location);
if (dist_edge > kMaxLongEdgeDist) {
// VERY long edge. Don't add it
} else {
// Get the path distance
std::vector<int> path;
graph_utils_ns::ShortestPathBtwVertex(path, global_graph_, start_vertex_idx, end_vertex_idx);
bool path_exists = true;
float dist_path = 0;
// Check if there is an existing path
if (path.empty()) {
// No path exists
path_exists = false;
} else {
// Compute path length
dist_path = graph_utils_ns::PathLength(path, global_graph_);
// ROS_WARN("path exists of edge of length %f, where path exists of length
// %f", dist_edge, dist_path);
}
// Check if ratio is beyond threshold
// bool collision = false;
// 论文中公式6定义的约束检查
if ((!path_exists || (path_exists && ((dist_path / dist_edge) >= kExistingPathRatioThresholdGlobal))) &&
(!zCollisionCheck(start_vertex_idx, end_vertex_idx, global_graph_))) {
Eigen::Vector3d origin;
Eigen::Vector3d end;
origin.x() = global_graph_.vertices[start_vertex_idx].location.x;
origin.y() = global_graph_.vertices[start_vertex_idx].location.y;
origin.z() = global_graph_.vertices[start_vertex_idx].location.z;
end.x() = global_graph_.vertices[end_vertex_idx].location.x;
end.y() = global_graph_.vertices[end_vertex_idx].location.y;
end.z() = global_graph_.vertices[end_vertex_idx].location.z;
// 确保连线没有碰撞(光线追踪进行碰撞检测)
if (volumetric_mapping::OctomapManager::CellStatus::kFree == manager_->getLineStatusBoundingBox(origin, end, robot_bounding)) {
addGlobalEdgeWithoutCheck(start_vertex_idx, end_vertex_idx, false);
}
}
}
}二. 订阅/graph_planner_path以及/graph_planner_status,并执行回调函数。这两个话题是由graph_planner节点发布的,暂时先不看。
1.4 dual_state_frontier对象
// 定义一个全局边界求解器
dual_state_frontier_ = new DualStateFrontier(nh_, nh_private_, manager_, grid_);
DualStateFrontier::DualStateFrontier(
const ros::NodeHandle &nh, const ros::NodeHandle &nh_private,
volumetric_mapping::OctomapManager *manager, OccupancyGrid *grid)
: nh_(nh), nh_private_(nh_private) {
manager_ = manager;
grid_ = grid;
initialize();
}构造函数只执行了initialize()函数
bool DualStateFrontier::initialize() {
// Read in parameters
if (!readParameters())
return false;
// Initialize subscriber
// /global_points
graph_points_sub_ = nh_.subscribe(sub_graph_points_topic_, 1, &DualStateFrontier::graphPointsCallback, this);
// /state_estimation
odom_sub_.subscribe(nh_, sub_odom_topic_, 1);
// /terrain_map_ext
terrain_point_cloud_sub_.subscribe(nh_, sub_terrain_point_cloud_topic_, 1);
sync_.reset(new Sync(syncPolicy(10), odom_sub_, terrain_point_cloud_sub_));
sync_->registerCallback(boost::bind(&DualStateFrontier::terrainCloudAndOdomCallback, this, _1, _2));
// /octomap_unknown
unknown_points_pub_ = nh_.advertise<sensor_msgs::PointCloud2>(pub_unknown_points_topic_, 1);
// /global_frontier
global_frontier_points_pub_ = nh_.advertise<sensor_msgs::PointCloud2>(pub_global_frontier_points_topic_, 1);
// /local_frontier
local_frontier_points_pub_ = nh_.advertise<sensor_msgs::PointCloud2>(pub_local_frontier_points_topic_, 1);
terrain_elev_cloud_pub_ = nh_.advertise<sensor_msgs::PointCloud2>("/elevation_map", 1);
if (kExecuteFrequency_ > 0.0) {
executeTimer_ = nh_private_.createTimer(ros::Duration(1.0 / kExecuteFrequency_), &DualStateFrontier::execute, this);
}
for (int i = 0; i < kTerrainVoxelWidth * kTerrainVoxelWidth; i++) {
terrain_voxel_elev_.push_back(robot_position_.z());
terrain_voxel_points_num_.push_back(0);
terrain_voxel_min_elev_.push_back(1000);
terrain_voxel_max_elev_.push_back(-1000);
}
boundaryLoaded_ = false;
ROS_INFO("Successfully launched DualStateFrontier node");
return true;
}首先在一定频率下,不断执行execute()函数,而execute()函数则是调用getFrontiers()函数。
executeTimer_ = nh_private_.createTimer(ros::Duration(1.0 / kExecuteFrequency_), &DualStateFrontier::execute, this);
void DualStateFrontier::execute(const ros::TimerEvent &e) { getFrontiers(); }
void DualStateFrontier::getFrontiers() {
// search_bounding[0] = 40
// search_bounding[1] = 40
// search_bounding[2] = 0.5
// 给定一个范围,和位置中心,得到它周围的属于边界的点云,并将得到的边界点集合保存到local_frontier_中
getUnknowPointcloudInBoundingBox(robot_position_, search_bounding);
// 局部边界点的检查和更新
localFrontierUpdate(robot_position_);
// 全局边界点的检查和更新
gloabalFrontierUpdate();
// 对全局采样点的下采样
globalFrontiersNeighbourCheck();
// 对各个内容的发布,包括局部边界点,全局边界点,处于未知状态的点云
publishFrontiers();
}1. 首先调用getUnknowPointcloudInBoundingBox()函数:
1.1 首先对中心位置进行调整,即调整center参数
1.2 依次遍历给定范围内的x,y,z;调用octomap,根据点坐标得到索引值,并根据索引值得到具体的节点。
1.3 如果octomap中没有这样的节点,就将该点加入到未知点集合unknown_points_中,如果该点在给定的范围之内,并且确实是一个边界点(如果该点确实是边界点,那么该点周围应该既有空闲也有未知),那么就加入到local_frontier_temp中
1.4 对local_frontier_temp进行滤波得到local_frontier_
2. 接着调用localFrontierUpdate(robot_position_)函数:
2.1 遍历local_frontier中的每一个点
2.2 inSensorRangeofRobot()函数解析:只有其传参距离机器人当前位置在一定阈值之内,并且其向量的俯仰角小于15度,和机器人当前未知进行光线追踪的栅格单元都是free状态,则返回TRUE
2.3 collisionCheckByTerrainWithVector(center, checkedPoint)函数:给定一个起点和终点,判断二者连线上有没有障碍物
2.4 inSensorRangeofGraphPoints(checkedPoint):输入一个点,利用kd树,在全局中找到最近得到点的集合,只要有一个可以被形参位置正常观测,并且没有障碍物,则认为是true
2.5 满足一定条件的边界点被加入到local_frontier_pcl_以及global_frontier_中,并对local_frontier_pcl_进行降采样点得到local_frontier_
3. 调用gloabalFrontierUpdate()函数:提取 global_frontier_中的每一个点,如果该点属于被清空过的边界点,则跳出本次循环,得到该点在octomap中的索引值,如果该点属于边界点则添加到global_frontier_pcl_中,并对其进行滤波得到global_frontier_
4. globalFrontiersNeighbourCheck();: 遍历 global_frontier_中每一个点,通过KD树搜索其附近的边界点,如果存在,则只保存一个边界点。相当于对全局边界点的一个下采样,并将结果保存到global_frontier_pcl_和global_frontier_中
5. 发布/global_frontier以及/local_frontier ,/global_frontier比/local_frontier多了一次检查是否属于被清空的边界点,然后进行了两次滤波
execute()函数总结:遍历当前机器人位置一定范围内的点,并找出边界点,后续通过降采样得到边界点并发布出去
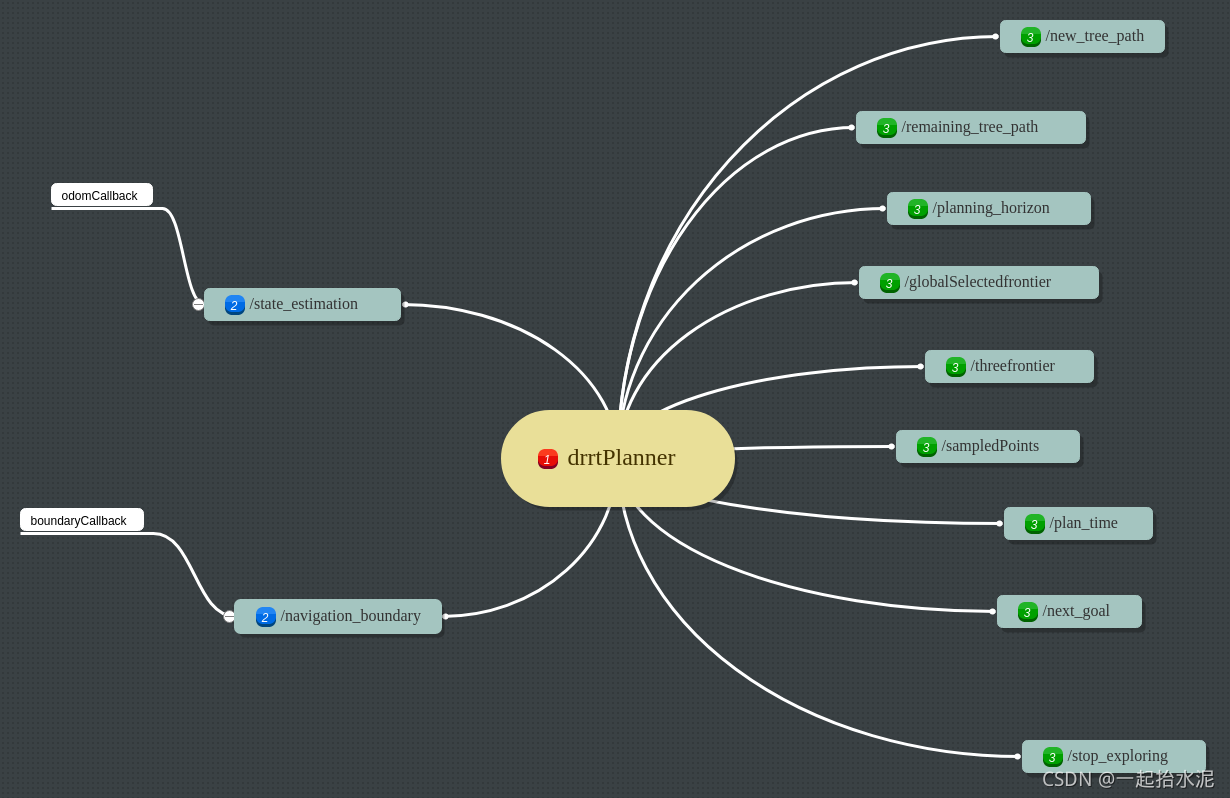
2. 执行init()函数(读取参数以及确定订阅者和发布者)
bool dsvplanner_ns::drrtPlanner::init() {
if (!setParams()) {
ROS_ERROR("Set parameters fail. Cannot start planning!");
}
odomSub_ = nh_.subscribe(odomSubTopic, 10, &dsvplanner_ns::drrtPlanner::odomCallback, this);
boundarySub_ = nh_.subscribe(boundarySubTopic, 10, &dsvplanner_ns::drrtPlanner::boundaryCallback, this);
params_.newTreePathPub_ = nh_.advertise<visualization_msgs::Marker>(newTreePathPubTopic, 1000);
params_.remainingTreePathPub_ = nh_.advertise<visualization_msgs::Marker>(remainingTreePathPubTopic, 1000);
params_.boundaryPub_ = nh_.advertise<visualization_msgs::Marker>(boundaryPubTopic, 1000);
params_.globalSelectedFrontierPub_ = nh_.advertise<sensor_msgs::PointCloud2>(globalSelectedFrontierPubTopic, 1000);
params_.localSelectedFrontierPub_ = nh_.advertise<sensor_msgs::PointCloud2>(localSelectedFrontierPubTopic, 1000);
params_.randomSampledPointsPub_ = nh_.advertise<sensor_msgs::PointCloud2>(randomSampledPointsPubTopic, 1000);
params_.plantimePub_ = nh_.advertise<std_msgs::Float32>(plantimePubTopic, 1000);
params_.nextGoalPub_ = nh_.advertise<geometry_msgs::PointStamped>(nextGoalPubTopic, 1000);
params_.shutdownSignalPub = nh_.advertise<std_msgs::Bool>(shutDownTopic, 1000);
plannerService_ = nh_.advertiseService(plannerServiceName, &dsvplanner_ns::drrtPlanner::plannerServiceCallback,this);
cleanFrontierService_ = nh_.advertiseService(cleanFrontierServiceName, &dsvplanner_ns::drrtPlanner::cleanFrontierServiceCallback, this);
return true;
}
2.1 订阅/state_estimation,执行odomCallback()回调函数(机器人当前位姿传递给drrt求解器)
void dsvplanner_ns::drrtPlanner::odomCallback(const nav_msgs::Odometry &pose) {
drrt_->setRootWithOdom(pose);
// Planner is now ready to plan.
drrt_->plannerReady_ = true;
}void dsvplanner_ns::Drrt::setRootWithOdom(const nav_msgs::Odometry &pose) {
root_[0] = pose.pose.pose.position.x;
root_[1] = pose.pose.pose.position.y;
root_[2] = pose.pose.pose.position.z;
}2.3 定义服务:
服务类型:dsvplanner_srv
Header header
-------
geometry_msgs/Point[] goal
std_msgs/Int32 modeplannerService_ = nh_.advertiseService(plannerServiceName, &dsvplanner_ns::drrtPlanner::plannerServiceCallback,this);
cleanFrontierService_ = nh_.advertiseService(cleanFrontierServiceName, &dsvplanner_ns::drrtPlanner::cleanFrontierServiceCallback, this);graph_planner_node.cpp
1. 定义一个GraphPlanner对象
2. 执行execute()函数
graph_planner_ns::GraphPlanner graph_planner(node_handle); graph_planner.execute();
graph_planner.cpp
此函数为graph_planner的实现函数,首先看其构造函数
GraphPlanner::GraphPlanner(const ros::NodeHandle &nh) { nh_ = nh; initialize(); }
1. initialize()
bool GraphPlanner::initialize() {
if (!readParameters())
return false;
// Initialize target waypoint
waypoint_ = geometry_msgs::PointStamped();
waypoint_.point.x = -1.0;
waypoint_.point.y = -1.0;
waypoint_.point.z = 0.0;
// world_frame_id_ : map
waypoint_.header.frame_id = world_frame_id_;
// Initialize subscribers
// /local_graph
graph_sub_ = nh_.subscribe(sub_graph_topic_, 1, &GraphPlanner::graphCallback, this);
// /graph_planner_command
graph_planner_command_sub_ = nh_.subscribe(graph_planner_command_topic_, 1, &GraphPlanner::commandCallback, this);
// /state_estimation
odometry_sub_ = nh_.subscribe(sub_odometry_topic_, 1, &GraphPlanner::odometryCallback, this);
// /terrain_map_ext
terrain_sub_ = nh_.subscribe(sub_terrain_topic_, 1, &GraphPlanner::terrainCallback, this);
// Initialize publishers
// /way_point
waypoint_pub_ = nh_.advertise<geometry_msgs::PointStamped>(pub_waypoint_topic_, 2);
// /graph_planner_status
graph_planner_status_pub_ = nh_.advertise<graph_planner::GraphPlannerStatus>(graph_planner_status_topic_, 2);
// /graph_planner_path
graph_planner_path_pub_ = nh_.advertise<nav_msgs::Path>(pub_path_topic_, 10);
ROS_INFO("Successfully launched graph_planner node");
return true;
}首先看订阅函数/state_estimation
1. 订阅/state_estimation,执行odometryCallback()回调函数:
将机器人当前(x,y,z)位置传递给robot_pos_,以及yaw信息传递给robot_yaw_
void GraphPlanner::odometryCallback(
const nav_msgs::Odometry::ConstPtr &odometry_msg) {
double roll, pitch, yaw;
geometry_msgs::Quaternion geo_quat = odometry_msg->pose.pose.orientation;
tf::Matrix3x3(tf::Quaternion(geo_quat.x, geo_quat.y, geo_quat.z, geo_quat.w))
.getRPY(roll, pitch, yaw);
robot_yaw_ = yaw;
robot_pos_ = odometry_msg->pose.pose.position;
}2. 订阅/terrain_map_ext,执行回调函数terrainCallback:
接受地型点云消息,大于0.2,小于1.2的点云被判断为会对机器人行动造成障碍,并将该点云保存到terrain_point_crop_中,并对其进行体素滤波得到terrain_point_crop_。
void GraphPlanner::terrainCallback( const sensor_msgs::PointCloud2::ConstPtr &terrain_msg) { terrain_point_->clear(); terrain_point_crop_->clear(); pcl::fromROSMsg(*terrain_msg, *terrain_point_); pcl::PointXYZI point; int terrainCloudSize = terrain_point_->points.size(); for (int i = 0; i < terrainCloudSize; i++) { point = terrain_point_->points[i]; float pointX = point.x; float pointY = point.y; float pointZ = point.z; // kObstacleHeightThres : 0.20 # the obstacle height that will be considered when filtering the terrain cloud // kOverheadObstacleHeightThres : 1.20 # the overhead obstacle height that will be considered when filtering the terrain cloud // 高于0.2 低于1.2的障碍物点云判断为会对机器人行动造成障碍 if (point.intensity > kObstacleHeightThres && point.intensity < kOverheadObstacleHeightThres) { point.x = pointX; point.y = pointY; point.z = pointZ; terrain_point_crop_->push_back(point); } } pcl::VoxelGrid<pcl::PointXYZI> point_ds; point_ds.setLeafSize(kDownsampleSize, kDownsampleSize, kDownsampleSize); point_ds.setInputCloud(terrain_point_crop_); point_ds.filter(*terrain_point_crop_); }
3. 接着订阅/local_graph以及/graph_planner_command,并执行回调函数。这里暂且不看
2. execute()
此部分函数和exeploration.cpp()函数有关



















 2830
2830

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











