




车牌识别系统详解
车牌识别(License Plate Recognition, LPR)是一项用于自动检测和读取车辆牌照信息的技术,广泛应用于交通监控、智能停车场管理等领域。本文将详细解释一个基于MATLAB实现的车牌识别系统的代码,并阐述其工作流程和技术细节。

一、代码文件说明
本项目主要由以下几个部分组成:
- 主程序:负责调用其他功能模块并控制整个处理流程。
- 图像预处理函数:包括颜色空间转换、边缘检测、形态学操作等步骤,旨在突出车牌特征。
- 车牌定位函数:通过统计像素分布来确定车牌的大致位置。
- 字符分割函数:对定位后的车牌区域进行进一步细化,准备后续的字符识别。
- 字符识别函数:利用模板匹配或其他机器学习方法解析车牌上的文字内容。
二、车牌识别算法流程
1. 图像预处理
预处理阶段是确保后续步骤准确性的关键。具体操作如下:
-
彩色图转灰度图:使用
rgb2gray()函数将输入的RGB图像转换为灰度图像,减少数据维度的同时保留了亮度信息。YuanShiHuiDu = rgb2gray(YuanShi); -
Canny算子边缘检测:应用Canny算子提取图像中的边缘信息,生成二值化结果,有助于区分背景与目标物体。
BianYuan = edge(YuanShiHuiDu, 'canny', 0.5); -
垂直线结构腐蚀:选择一个三行一列的线型结构元素对边缘图像进行腐蚀处理,目的是强化垂直方向上的线条特征(如车牌),同时削弱非相关噪声。
se1 = [1; 1; 1]; FuShi = imerode(BianYuan, se1); -
矩形结构闭运算:采用矩形结构元素执行闭运算(先膨胀后腐蚀),填充内部孔洞,使得车牌区域形成连通域。
se2 = strel('rectangle', [25, 25]); TianChong = imclose(FuShi, se2); -
面积筛选:运用
bwareaopen()函数移除面积小于设定阈值的对象,去除小尺寸干扰物。YuanShiLvBo = bwareaopen(TianChong, 2000);
上述过程通过一系列图像处理技术,逐步聚焦于可能存在的车牌区域,为下一步的精确定位打下基础。
2. 车牌定位
定位阶段分为两个子步骤——粗略定位和精细调整:
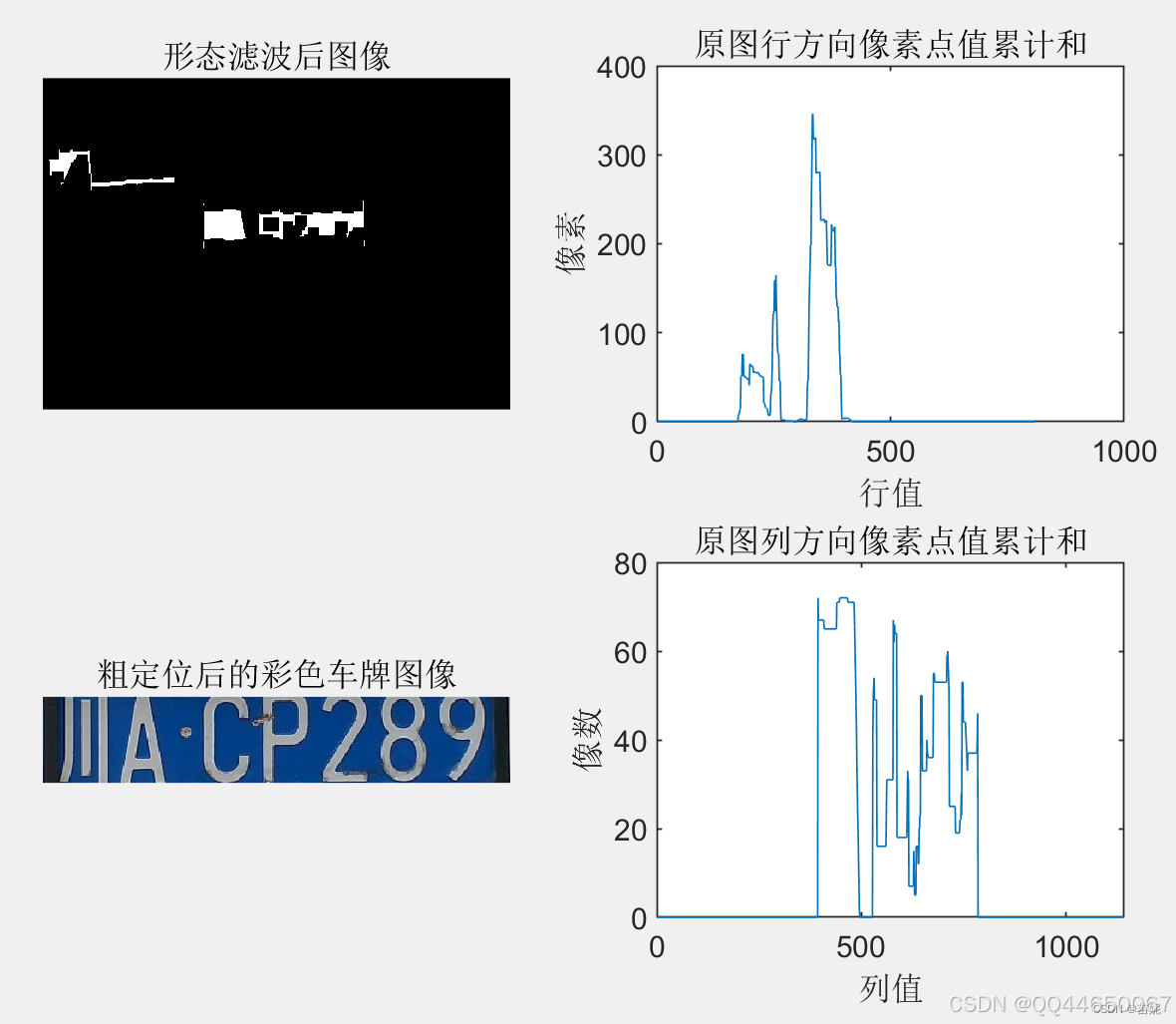
(1) 粗略定位
-
行方向统计:遍历每一行,记录白色像素的数量,找到最大值所在行作为初步估计的车牌中心位置。
Y1 = zeros(y, 1); for i = 1:y for j = 1:x if YuCuDingWei(i, j) == 1 Y1(i, 1) = Y1(i, 1) + 1; end end end [~, MaxY] = max(Y1); -
上下边界确定:从最大值处向上下搜索,直到遇到连续低于某个阈值的行,以此界定车牌的高度范围。
PY1 = MaxY; while ((Y1(PY1, 1) >= 50) && (PY1 > 1)) PY1 = PY1 - 1; end PY2 = MaxY; while ((Y1(PY2, 1) >= 50) && (PY2 < y)) PY2 = PY2 + 1; end -
列方向统计:类似地,在已知高度范围内计算各列的白色像素数量,确定左右边界。
X1 = zeros(1, x); for j = 1:x for i = PY1:PY2 if YuCuDingWei(i, j, 1) == 1 X1(1, j) = X1(1, j) + 1; end end end PX1 = 1; while ((X1(1, PX1) < 3) && (PX1 < x)) PX1 = PX1 + 1; end PX3 = x; while ((X1(1, PX3) < 3) && (PX3 > PX1)) PX3 = PX3 - 1; end -
裁剪图像:根据计算得到的边界坐标,截取出包含车牌的子图像。
CuDingWei = YuanShi(PY1:PY2, PX1:PX3, :);
(2) 精细调整
为了提高定位精度,还需要进行额外的预处理和边框干扰去除:
-
预处理:再次将RGB图像转换为灰度图,并通过自适应阈值法生成二值化图像。
CuDingWeiHuiDu = rgb2gray(CuDingWei); T = round(c_max - (c_max - c_min) / 3); CuDingWeiErZhi = im2bw(CuDingWeiHuiDu, T / 256); -
边框干扰去除:检查并清除左侧和右侧可能出现的多余边框,保证最终输出的是纯净的车牌图像。
ZuoKuanDu = 0; while sum(YuJingDingWei(:, ZuoKuanDu + 1)) ~= 0 ZuoKuanDu = ZuoKuanDu + 1; end if ZuoKuanDu < KuanDuYuZhi YuJingDingWei(:, 1:ZuoKuanDu) = 0; end YouKuanDu = 0; d = f; while sum(YuJingDingWei(:, d - 1)) ~= 0 YouKuanDu = YouKuanDu + 1; d = d - 1; end if YouKuanDu < KuanDuYuZhi YuJingDingWei(:, (f - YouKuanDu):f) = 0; end
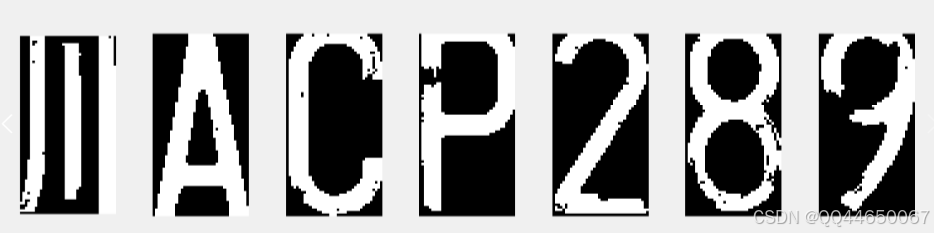
3. 车牌字符分割
字符分割是将定位后的车牌图像分解成单个字符的过程,以便后续进行字符识别。这里采用了基于投影的方法:
-
灰度化与二值化:重复之前的灰度化和二值化步骤,确保字符清晰可见。
ChePaiHuiDu = rgb2gray(DingWei); ChePaiErZhi = im2bw(ChePaiHuiDu, T / 256); -
形态学滤波:利用
bwareaopen()去除小面积对象,简化背景。ChePaiLvBo = bwareaopen(ChePaiErZhi, 20); -
列方向投影:统计每一列中白色像素的数量,绘制直方图辅助判断字符间的分隔点。
X3 = zeros(1, q); for j = 1:q for i = 1:p if ChePaiYuFenGe(i, j) == 1 X3(1, j) = X3(1, j) + 1; end end end -
倒序分割:按照从右到左的顺序逐一提取字符,并保存为单独的图像文件。
Px0 = q; for i = 1:6 while ((X3(1, Px0) < 3) && (Px0 > 0)) Px0 = Px0 - 1; end Px1 = Px0; while (((X3(1, Px1) >= 3)) && (Px1 > 0) || ((Px0 - Px1) < 15)) Px1 = Px1 - 1; end ChePaiFenGe = ChePaiLvBo(:, Px1:Px0, :); imwrite(ChePaiFenGe, strcat(int2str(8 - i), '.jpg')); Px0 = Px1; end
4. 字符识别
字符识别可以基于多种方法实现,例如模板匹配、深度学习模型等。考虑到篇幅限制,这部分未在提供的代码片段中展示,但通常会涉及到以下环节:
- 训练样本准备:收集足够数量且质量良好的字符样本,构建训练集。
- 特征提取:选择合适的特征描述符,如SIFT、HOG等,用于表征字符形状。
- 分类器训练:采用支持向量机(SVM)、卷积神经网络(CNN)等算法训练分类器。
- 测试与评估:对新采集的数据进行预测,并计算准确率等性能指标。
总结
综上所述,车牌识别系统结合了图像处理技术和模式识别方法,能够有效地从复杂场景中提取并解析车牌信息。本文详细介绍了该系统的核心组成部分及其工作原理,包括图像预处理、车牌定位、字符分割及字符识别等方面的知识。随着计算机视觉领域的不断发展,未来的研究可能会引入更先进的算法和技术,进一步提升系统的鲁棒性和准确性。


















 462
462

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









