







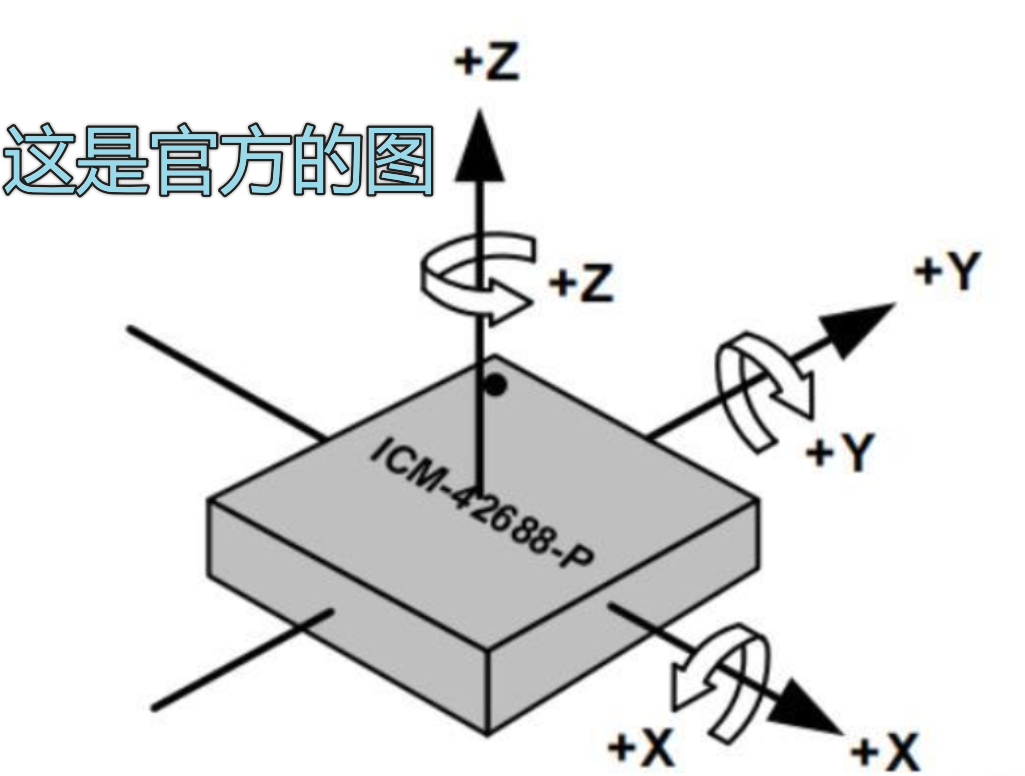
(我定义的旋转是,捏着轴逆时针旋转得到的角度为正,也就是角速度也为正)
校准阶段
首先直接从传感器获取加速度计和陀螺仪数据.

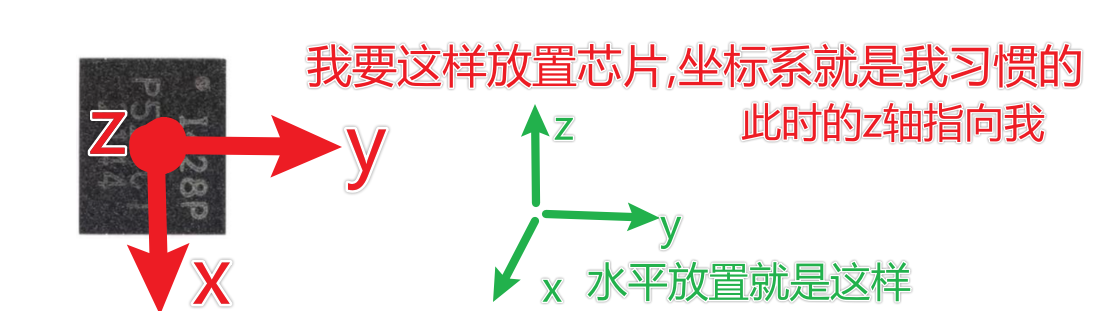
角速度验证:按照官方图所示放置传感器,绕着各个轴逆时针旋转,可得到数值为正的角速度输出.(也就是说逆时针旋转得到的夹角数值为正,所以微分后就是角速度也为正)
加速度计验证:按照官方图所示放置传感器,当我平放桌面时候,应该z轴方向输出负值,然而却是正值. 重复操作其他轴也一样情况,所以加速度计输出值应都取负值.

STM32F401
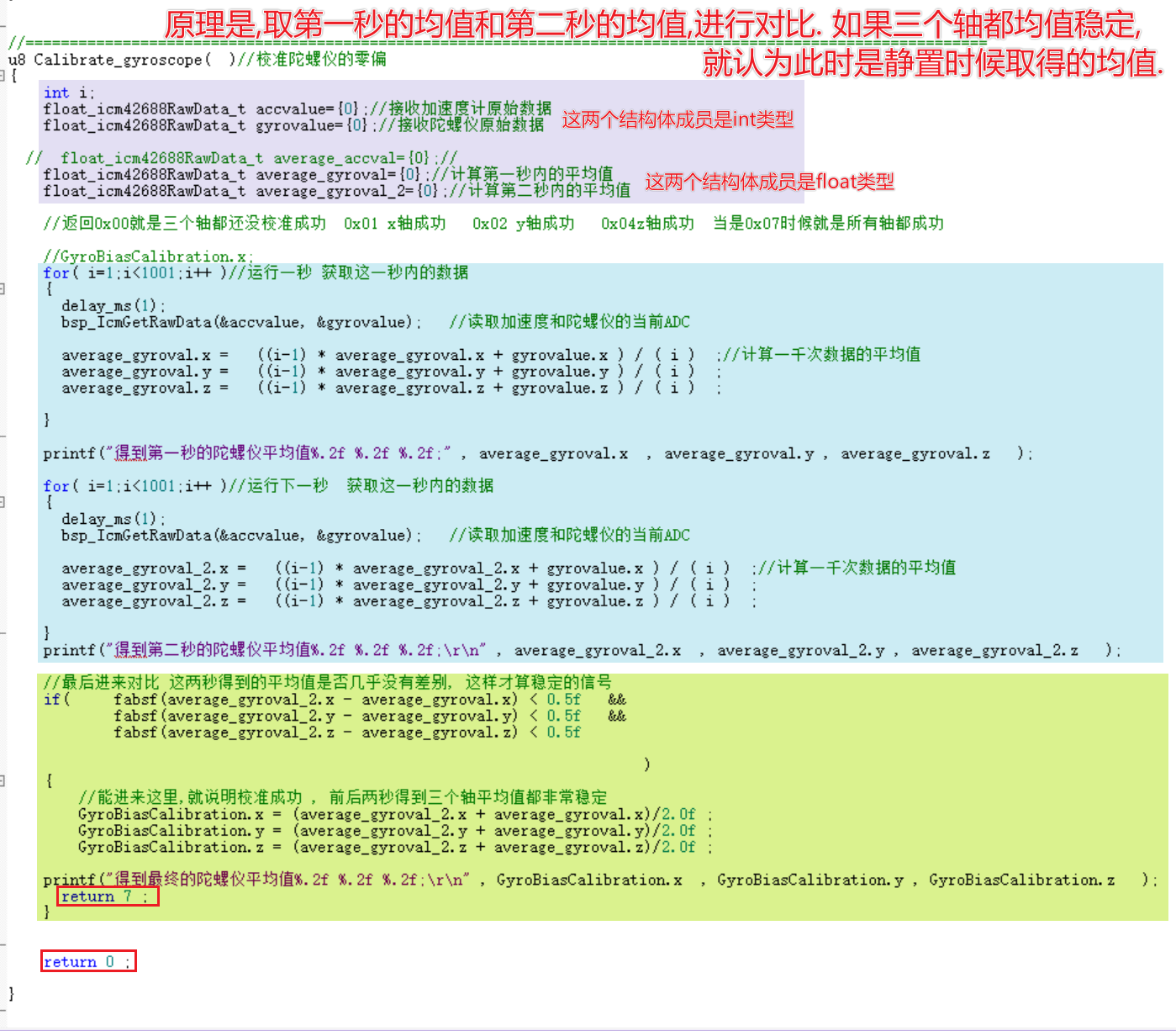
陀螺仪进行零偏校准
必须使用浮点数,才有精度, 都使用int最后偏差很大 .

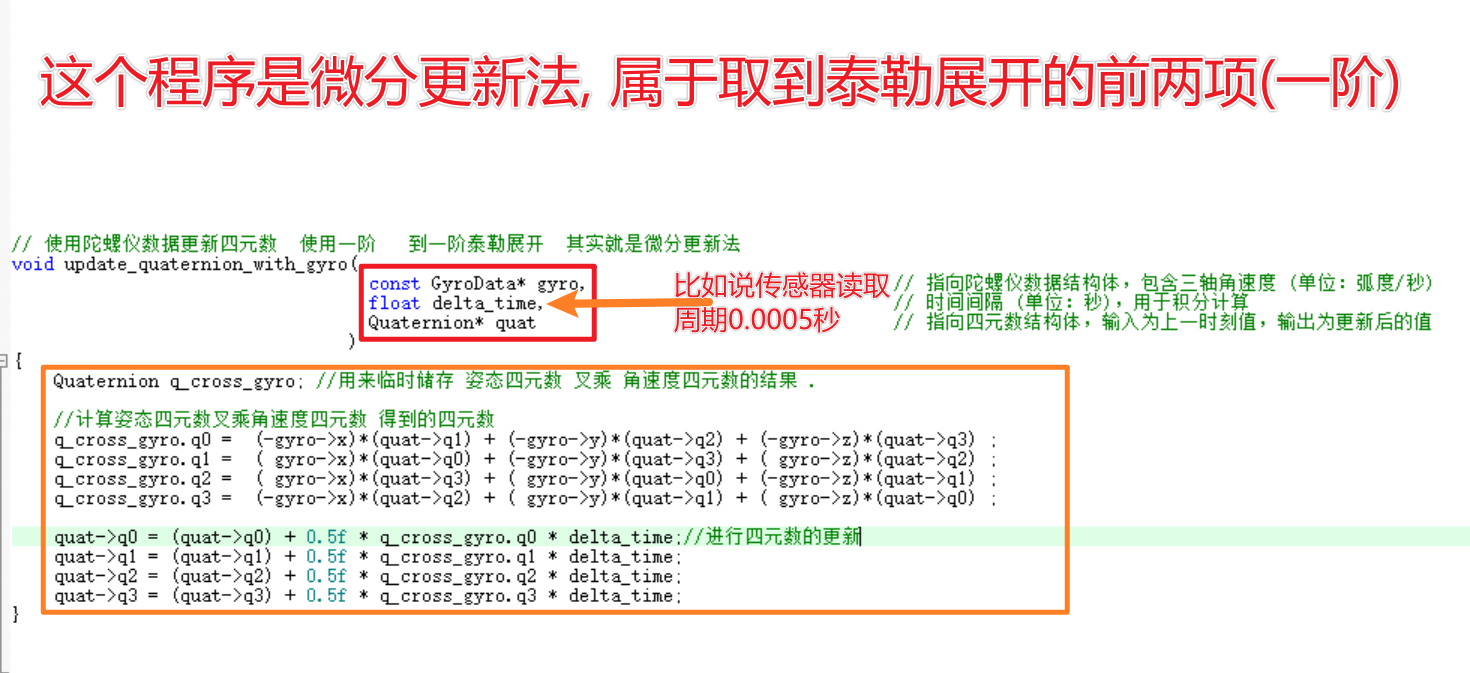
四元数更新程序
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









