







前言
Touch手柄在ROS环境下的配置,笔者在另一篇文章中有叙述:
Geomagic Touch 力反馈手柄在Ubuntu 20.04 ROS1 noetic 环境下的配置_touch手柄 ubuntu-优快云博客
这篇文章中已有RVIZ模型显示、同步运动的内容,可以供参考。
本文继续给出力反馈方面的基础实现教程,包括:位姿获取、按键状态获取、三轴力反馈实现、手柄位姿锁死,以飨后学。
20250410更新:
优化了功能包,解决了手柄静态下姿态不更新的问题,其余不变。
https://download.youkuaiyun.com/download/qq_38236680/90590826
目录
功能包创建
这里依旧是依赖前述功能包,可以在这里下载:
https://download.youkuaiyun.com/download/qq_38236680/89757312?spm=1001.2014.3001.5503
在同一工作空间下,创建力控程序包,注意这里的依赖项:
catkin_create_pkg geomagic_myhaptics geomagic_control roscpp rospy std_msgs geometry_msgs
创建成功。
位姿与按键信息获取
查看话题消息类型
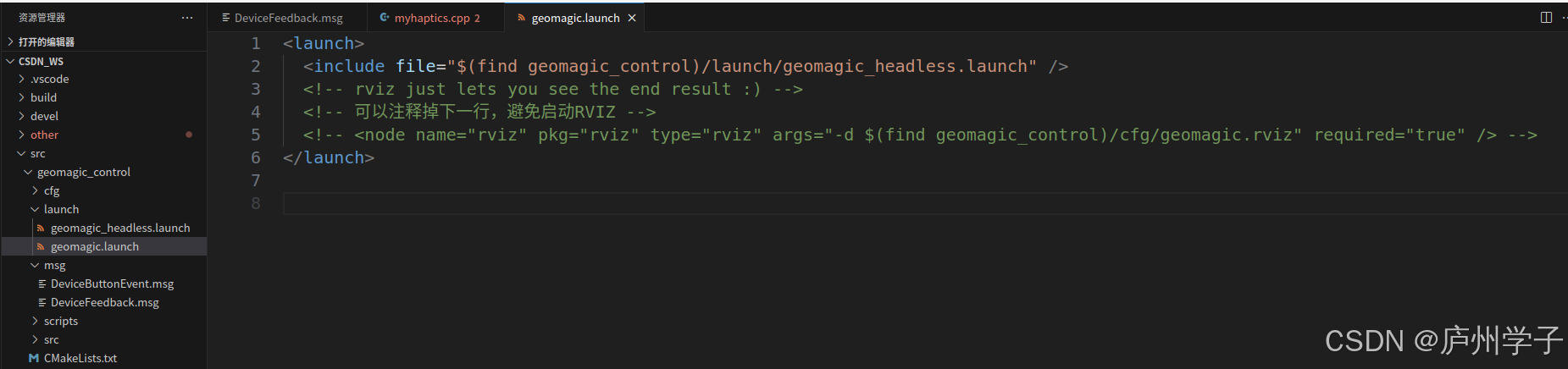
运行launch文件,具体步骤可见前一篇博客:
roslaunch geomagic_control geomagic.launch这里可以将launch文件修改下,注释掉RVIZ那一行,暂且不必显示模型。
查看位姿与按键话题的信息:
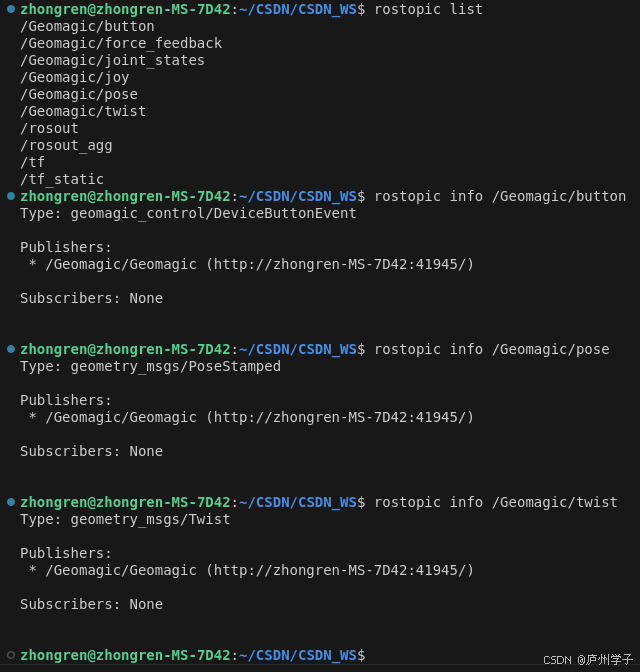
位姿使用 geometry_msgs 中的类型,以一定频率不断向该 /Geomagic/pose 话题发送当前位姿信息,手柄末端扭转信息同理。
按键信息属于自定义类型,可见于:
简单的 int 类型,两个按键,一灰一白,数值0 表示未按下,1 表示按下。在按键状态改变时会向 /Geomagic/button 话题发送信息。
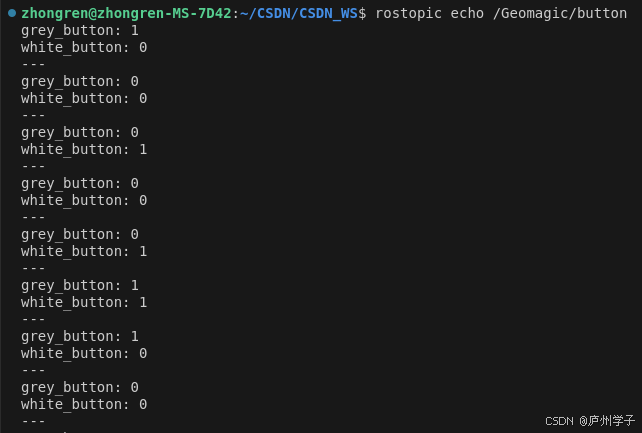
可以看到,在双键按下时会有先后,需要注意。
编写节点程序
创建源文件与头文件。
编写头文件:
#ifndef PUBFORCE_H
#define PUBFORCE_H
#include "ros/ros.h"
#include "geomagic_control/DeviceButtonEvent.h"
#include "geometry_msgs/PoseStamped.h"
void cb_pose(const geometry_msgs::PoseStampedConstPtr& msg);
void cb_button(const geomagic_control::DeviceButtonEvent::ConstPtr &bt);
#endif // !PUBFORCE_H
这里只是对位姿与按键的回调函数进行了定义,注意传入的变量类型。
转至源文件,先编写主函数,创建订阅者来订阅话题消息,并绑定回调函数。
#include "geomagic_myhaptics/pubforce.h"
//存储按键信息
bool flag_whitebutton=false;
bool flag_greybutton=false;
geometry_msgs::PoseStamped current_pose;
int main(int argc, char **argv)
{
// 避免中文乱码
setlocale(LC_ALL,"");
// 初始化ROS节点
ros::init(argc, argv, "pubforce");
// 创建节点句柄
ros::NodeHandle nh;
ros::Subscriber sub_pose=nh.subscribe<geometry_msgs::PoseStamped>("/Geomagic/pose",3,cb_pose);
ros::Subscriber sub_button = nh.subscribe<geomagic_control::DeviceButtonEvent>("/Geomagic/button", 3, cb_button);
ros::Rate r(30);
//在while循环中执行任务
while(ros::ok())
{
//接收最新的状态信息
ros::spinOnce();
r.sleep();
}
return 0;
}
这里定义了两个按键标志量,以及位姿变量,后续力反馈会用到。
编写回调函数:
// 接收到订阅的消息后,会进入消息回调函数
// 注意,这里需要在前面加const,因后为const ptr
void cb_button(const geomagic_control::DeviceButtonEvent::ConstPtr &bt)
{
flag_whitebutton=true?bt->white_button==1:false;
flag_greybutton=true?bt->grey_button==1:false;
ROS_INFO("按键状态改变: 灰色:%d,白色:%d",bt->grey_button,bt->white_button);
ROS_INFO("这时的位姿: x: %.2f, y: %.2f, z: %.2f",current_pose.pose.position.x,current_pose.pose.position.y,current_pose.pose.position.z);
ROS_INFO("这时的朝向: w: %.2f, x: %.2f, y: %.2f, z: %.2f",current_pose.pose.orientation.w,current_pose.pose.orientation.x,current_pose.pose.orientation.y,current_pose.pose.orientation.z);
}
void cb_pose(const geometry_msgs::PoseStampedConstPtr& msg)
{
//存储当前位置
current_pose=*msg;
}
这里只是简单输出按键变化,以及按下时的手柄末端坐标,在后续的力反馈实现中会有更复杂的实现。
修改CMakeList:
cmake_minimum_required(VERSION 3.0.2)
project(geomagic_myhaptics)
find_package(catkin REQUIRED COMPONENTS
geomagic_control
geometry_msgs
roscpp
rospy
std_msgs
)
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES geomagic_myhaptics
# CATKIN_DEPENDS geomagic_control geometry_msgs roscpp rospy std_msgs
# DEPENDS system_lib
)
include_directories(
# 这里取消注释
include
${catkin_INCLUDE_DIRS}
)
add_executable(pubforce src/pubforce.cpp)
add_dependencies(pubforce ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(pubforce
${catkin_LIBRARIES}
)
编译,成功通过。
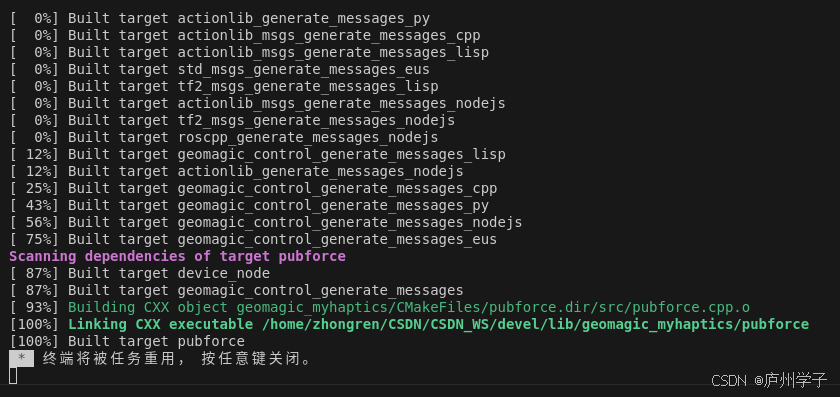 source一下,运行前述launch文件。
source一下,运行前述launch文件。
source ./devel/setup.bash
roslaunch geomagic_control geomagic.launch另开终端,source一下,运行生成的文件。
source ./devel/setup.bash
rosrun geomagic_myhaptics pubforce 成功实现位姿与按键信息的获取。

力反馈实现
Touch手柄力反馈规格
查询官网,可见Touch对外输出的力最大为3.3N,也即XYZ三轴均能输出最大为3.3N的力。

Geomagic Touch触觉设备及软件工具组_上海形宙数字技术有限公司
查看话题消息类型
连接上Touch手柄,运行笔者上传的launch文件,步骤详见前述博客。
roslaunch geomagic_control geomagic.launch另开终端,查看当前消息:
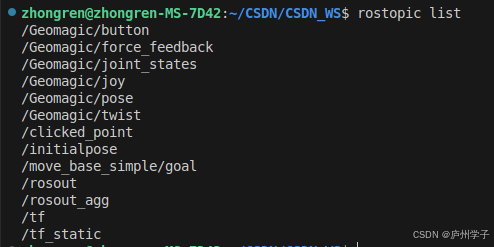
这里的,/Geomagic/force_feedback,就是我们需要用到的话题。
查看话题类型:

它使用 geomagic_control/DeviceFeedback 类型的消息,由控制节点接收,并下发给Touch设备,以实现力反馈。
消息定义文件在 geomagic_control 功能包中,如下:
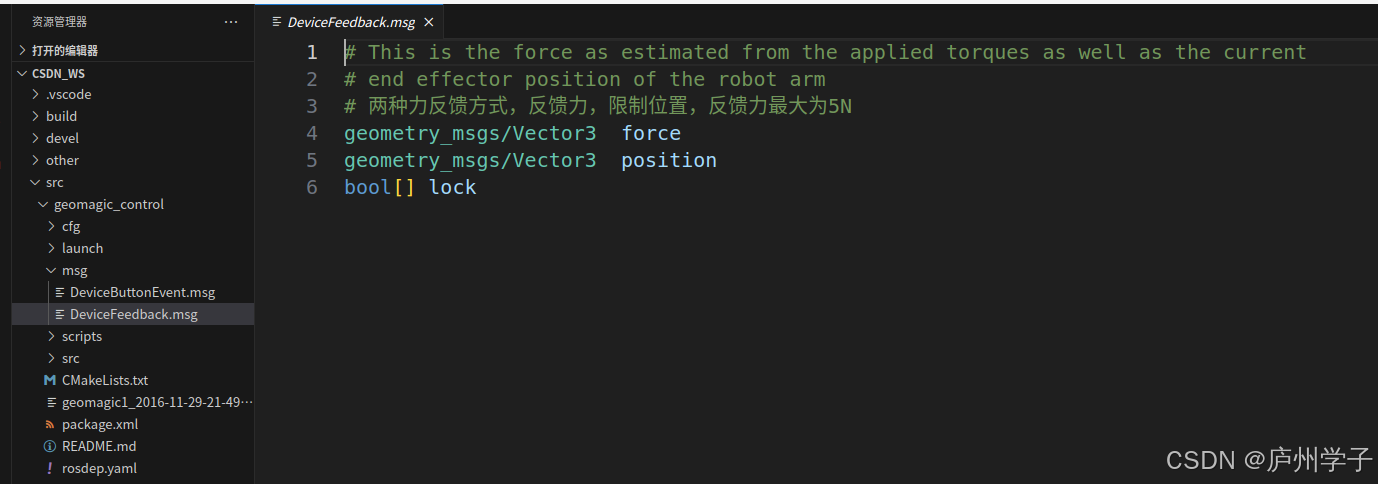
可见,包含 三维力向量,三维位姿向量,以及三轴锁死向量。
力反馈快速尝试
这里,可以利用终端补全,来快速尝试力反馈的功能。
先source下,否则无法获取消息文件,不能补全。
source ./devel/setup.bash而后,输入
rostopic pub /Geomagic/force_feedback不断使用Tab补全,可得消息模板:
rostopic pub /Geomagic/force_feedback geomagic_control/DeviceFeedback "force:
x: 0.0
y: 0.0
z: 0.0
position:
x: 0.0
y: 0.0
z: 0.0
lock:
- false"这里大家可以自由编辑force下的各轴力大小以测试,position和lock部分暂且不要改动。
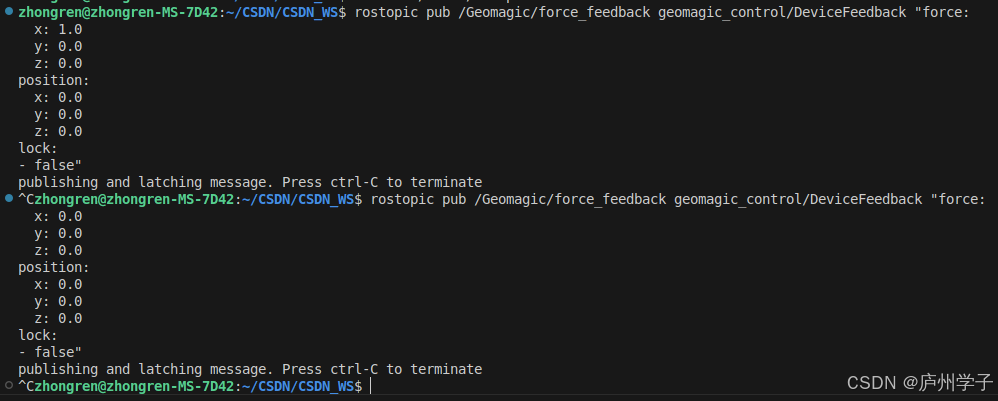
如:
rostopic pub /Geomagic/force_feedback geomagic_control/DeviceFeedback "force:
x: 1.0
y: 0.0
z: 0.0
position:
x: 0.0
y: 0.0
z: 0.0
lock:
- false"即,对x轴的正方向施加1N的力。回车,发布后,可以感觉到手柄有向右的力反馈。
体验完后记得发布归零消息,释放手柄。
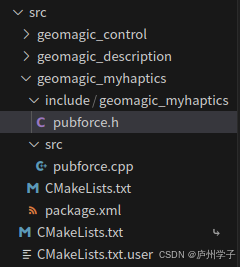
编写节点程序
创建头文件与源文件。
编写头文件,在前述位姿与按键信息获取的程序基础上修改即可。
#ifndef PUBFORCE_H
#define PUBFORCE_H
#include "ros/ros.h"
#include "geomagic_control/DeviceButtonEvent.h"
#include "geometry_msgs/PoseStamped.h"
#include "geomagic_control/DeviceFeedback.h"
#include <vector>
// 单轴输出的最大力 官网显示最大3.3N 测试可用1N
#define MAX_FORCE 1
// 表征Touch手柄所处的各种状态
#define RELEASE 0
#define FORCE_FEEDBACK 1
#define LOCK 2
//位姿与按键订阅者的回调函数
void cb_pose(const geometry_msgs::PoseStampedConstPtr& msg);
void cb_button(const geomagic_control::DeviceButtonEvent::ConstPtr &bt);
//释放手柄
void touch_release(void);
//在指定位置锁住touch手柄
void touch_lock(geometry_msgs::PoseStamped* pose);
#endif // !PUBFORCE_H
这里,定义了单轴输出的最大力,最大为3.3N。测试建议使用1N,避免力量过大,损坏设备。后续为回调函数,以及释放与锁住手柄的函数,注意传入的参数类型。
编写源文件,首先定义一些全局变量。
#include "geomagic_myhaptics/pubforce.h"
using namespace std;
//存储按键信息
bool flag_whitebutton=false;
bool flag_greybutton=false;
//Touch手柄状态:0 释放(自由状态) 1 力反馈状态 2 锁死状态
int touch_state=0;
ros::Publisher pub_force;
geometry_msgs::PoseStamped current_pose;底部两行分别定义力反馈信息的发布者,以及存储当前位姿的变量。
而后,初步编写主函数,编写两回调函数:
int main(int argc, char **argv)
{
// 避免中文乱码
setlocale(LC_ALL,"");
// 初始化ROS节点
ros::init(argc, argv, "pubforce");
// 创建节点句柄
ros::NodeHandle nh;
ros::Subscriber sub_pose=nh.subscribe<geometry_msgs::PoseStamped>("/Geomagic/pose",3,cb_pose);
ros::Subscriber sub_button = nh.subscribe<geomagic_control::DeviceButtonEvent>("/Geomagic/button", 3, cb_button);
pub_force=nh.advertise<geomagic_control::DeviceFeedback>("/Geomagic/force_feedback",10);
touch_state=RELEASE;
ros::Rate r(30);
//在while循环中执行任务
while(ros::ok())
{
vector<uint8_t> lockv;
geomagic_control::DeviceFeedback fb;
//接收最新的状态信息
ros::spinOnce();
r.sleep();
}
return 0;
}
// 接收到订阅的消息后,会进入消息回调函数
// 注意,这里需要在前面加const,因后为const ptr
void cb_button(const geomagic_control::DeviceButtonEvent::ConstPtr &bt)
{
flag_whitebutton=true?bt->white_button==1:false;
flag_greybutton=true?bt->grey_button==1:false;
// ROS_INFO("按键状态改变: 灰色:%d,白色:%d",bt->grey_button,bt->white_button);
// ROS_INFO("这时的位姿: x: %.2f, y: %.2f, z: %.2f",current_pose.pose.position.x,current_pose.pose.position.y,current_pose.pose.position.z);
// ROS_INFO("这时的朝向: w: %.2f, x: %.2f, y: %.2f, z: %.2f",current_pose.pose.orientation.w,current_pose.pose.orientation.x,current_pose.pose.orientation.y,current_pose.pose.orientation.z);
}
void cb_pose(const geometry_msgs::PoseStampedConstPtr& msg)
{
//存储当前位置
current_pose=*msg;
}主函数中,初始化了位姿与按键信息的订阅者,以及力反馈信息的发布者。并在主循环中定义了用于发布力反馈信息的向量与消息。回调函数仅进行简单的信息记录,更新当前最新的位姿与按键信息。
编写释放Touch手柄与锁住手柄的函数:
//在指定位置锁住touch手柄
void touch_lock(geometry_msgs::PoseStamped* pose)
{
vector<uint8_t> lockv;
geomagic_control::DeviceFeedback fb;
//三方向均锁死
lockv.push_back(1);
lockv.push_back(1);
lockv.push_back(1);
fb.position.x=pose->pose.position.x;
fb.position.y=pose->pose.position.y;
fb.position.z=pose->pose.position.z;
fb.lock=lockv;
pub_force.publish(fb);
touch_state=LOCK;
ROS_INFO("手柄已锁住");
}
//释放Touch手柄 解锁、不输出力
void touch_release(void)
{
vector<uint8_t> lockv;
geomagic_control::DeviceFeedback fb;
lockv.push_back(0);
lockv.push_back(0);
lockv.push_back(0);
fb.lock=lockv;
pub_force.publish(fb);
touch_state=RELEASE;
ROS_INFO("手柄已释放");
}这里也仅仅是对力反馈消息的填充,发布。而后,更新Touch手柄当前的状态,并在终端进行提示。
继续编写主循环函数,实现稍复杂的力反馈功能。
//在while循环中执行任务
while(ros::ok())
{
vector<uint8_t> lockv;
geomagic_control::DeviceFeedback fb;
//接收最新的状态信息
ros::spinOnce();
// 双键按下 双按则锁死当前位置 再次双按则解锁
if((flag_greybutton==true)&&(flag_whitebutton==true))
{
if(touch_state!=LOCK)
{
touch_lock(¤t_pose);
//双键按下后,全部置否,等待下一次按下,避免因长时间按住,重复操作
flag_greybutton=false;
flag_whitebutton=false;
}
else
{
touch_release();
//双键按下后,全部置否,等待下一次按下,避免因长时间按住,重复操作
flag_greybutton=false;
flag_whitebutton=false;
}
continue;
}
//锁死状态下不进行力反馈操作
if(touch_state==LOCK)
{
continue;
}
//按下灰色按键,启闭力反馈功能
if(flag_greybutton==true)
{
if(touch_state!=FORCE_FEEDBACK)
{
touch_state=FORCE_FEEDBACK;
ROS_INFO("手柄力反馈开启");
}
else
{
ROS_INFO("手柄力反馈关闭");
touch_release();
}
//按下后,标志置否,等待下一次按下,避免因长时间按住,重复操作
flag_greybutton=false;
}
//根据手柄位置施加相应力,使其归于三轴0点
if(touch_state==FORCE_FEEDBACK)
{
// 超出运动范围则退出力反馈
if(abs(current_pose.pose.position.x)>100||abs(current_pose.pose.position.y)>100||abs(current_pose.pose.position.z)>50)
{
ROS_INFO("超出运动范围,手柄力反馈关闭");
touch_release();
continue;
}
// 运动范围:x、y大概是正负两百,z正负50,具体可见echo /Geomagic/pose的信息
// 这里取xy正负一百,z正负50
// 根据位置 施加反方向的力即可
fb.force.x=-((int)current_pose.pose.position.x/100.0)*MAX_FORCE;
fb.force.y=-((int)current_pose.pose.position.y/100.0)*MAX_FORCE;
fb.force.z=-((int)current_pose.pose.position.z/50.0)*MAX_FORCE;
//三方向均解锁 需要解锁,否则不可实现力反馈
lockv.push_back(0);
lockv.push_back(0);
lockv.push_back(0);
fb.lock=lockv;
pub_force.publish(fb);
}
r.sleep();
}这里的控制逻辑为:
Touch手柄初始为自由状态(释放状态)。
按下灰色按键进入力反馈状态(需在三轴0点附近按下,勿太靠近底座,避免刚进入即退出),会根据手柄位置施加相应的力,使其保持在0点附近,超出一定空间范围自动退出力反馈。再次按下灰色按键退出力反馈状态,返回自由状态。
两个按键同时按下则进入位姿锁死状态,手柄保持在当前位置,不可进行其它操作。再次双按则退出锁死状态,返回自由状态。
整体的源文件为:
/*
发送力控指令给Touch手柄
根据手柄按键状态以及位姿进行力反馈操作
初始为自由状态(释放状态)
按下灰色按键进入力反馈状态(需在三轴0点附近按下,勿太靠近底座,避免刚进入即退出)
会根据手柄位置施加相应的力 使其保持在0点附近 超出一定空间范围自动退出力反馈
再次按下灰色按键退出力反馈状态
两个按键同时按下则进入锁死状态 手柄保持在当前位置 不可进行其它操作
再次双按则退出锁死状态 返回自由状态
庐州学子
2025.1.12
*/
#include "geomagic_myhaptics/pubforce.h"
using namespace std;
//存储按键信息
bool flag_whitebutton=false;
bool flag_greybutton=false;
//Touch手柄状态:0 释放(自由状态) 1 力反馈状态 2 锁死状态
int touch_state=0;
ros::Publisher pub_force;
geometry_msgs::PoseStamped current_pose;
int main(int argc, char **argv)
{
// 避免中文乱码
setlocale(LC_ALL,"");
// 初始化ROS节点
ros::init(argc, argv, "pubforce");
// 创建节点句柄
ros::NodeHandle nh;
ros::Subscriber sub_pose=nh.subscribe<geometry_msgs::PoseStamped>("/Geomagic/pose",3,cb_pose);
ros::Subscriber sub_button = nh.subscribe<geomagic_control::DeviceButtonEvent>("/Geomagic/button", 3, cb_button);
pub_force=nh.advertise<geomagic_control::DeviceFeedback>("/Geomagic/force_feedback",10);
touch_state=RELEASE;
ros::Rate r(30);
//在while循环中执行任务
while(ros::ok())
{
vector<uint8_t> lockv;
geomagic_control::DeviceFeedback fb;
//接收最新的状态信息
ros::spinOnce();
// 双键按下 双按则锁死当前位置 再次双按则解锁
if((flag_greybutton==true)&&(flag_whitebutton==true))
{
if(touch_state!=LOCK)
{
touch_lock(¤t_pose);
//双键按下后,全部置否,等待下一次按下,避免因长时间按住,重复操作
flag_greybutton=false;
flag_whitebutton=false;
}
else
{
touch_release();
//双键按下后,全部置否,等待下一次按下,避免因长时间按住,重复操作
flag_greybutton=false;
flag_whitebutton=false;
}
continue;
}
//锁死状态下不进行力反馈操作
if(touch_state==LOCK)
{
continue;
}
//按下灰色按键,启闭力反馈功能
if(flag_greybutton==true)
{
if(touch_state!=FORCE_FEEDBACK)
{
touch_state=FORCE_FEEDBACK;
ROS_INFO("手柄力反馈开启");
}
else
{
ROS_INFO("手柄力反馈关闭");
touch_release();
}
//按下后,标志置否,等待下一次按下,避免因长时间按住,重复操作
flag_greybutton=false;
}
//根据手柄位置施加相应力,使其归于三轴0点
if(touch_state==FORCE_FEEDBACK)
{
// 超出运动范围则退出力反馈
if(abs(current_pose.pose.position.x)>100||abs(current_pose.pose.position.y)>100||abs(current_pose.pose.position.z)>50)
{
ROS_INFO("超出运动范围,手柄力反馈关闭");
touch_release();
continue;
}
// 运动范围:x、y大概是正负两百,z正负50,具体可见echo /Geomagic/pose的信息
// 这里取xy正负一百,z正负50
// 根据位置 施加反方向的力即可
fb.force.x=-((int)current_pose.pose.position.x/100.0)*MAX_FORCE;
fb.force.y=-((int)current_pose.pose.position.y/100.0)*MAX_FORCE;
fb.force.z=-((int)current_pose.pose.position.z/50.0)*MAX_FORCE;
//三方向均解锁 需要解锁,否则不可实现力反馈
lockv.push_back(0);
lockv.push_back(0);
lockv.push_back(0);
fb.lock=lockv;
pub_force.publish(fb);
}
r.sleep();
}
return 0;
}
// 接收到订阅的消息后,会进入消息回调函数
// 注意,这里需要在前面加const,因后为const ptr
void cb_button(const geomagic_control::DeviceButtonEvent::ConstPtr &bt)
{
flag_whitebutton=true?bt->white_button==1:false;
flag_greybutton=true?bt->grey_button==1:false;
// ROS_INFO("按键状态改变: 灰色:%d,白色:%d",bt->grey_button,bt->white_button);
// ROS_INFO("这时的位姿: x: %.2f, y: %.2f, z: %.2f",current_pose.pose.position.x,current_pose.pose.position.y,current_pose.pose.position.z);
// ROS_INFO("这时的朝向: w: %.2f, x: %.2f, y: %.2f, z: %.2f",current_pose.pose.orientation.w,current_pose.pose.orientation.x,current_pose.pose.orientation.y,current_pose.pose.orientation.z);
}
void cb_pose(const geometry_msgs::PoseStampedConstPtr& msg)
{
//存储当前位置
current_pose=*msg;
}
//在指定位置锁住touch手柄
void touch_lock(geometry_msgs::PoseStamped* pose)
{
vector<uint8_t> lockv;
geomagic_control::DeviceFeedback fb;
//三方向均锁死
lockv.push_back(1);
lockv.push_back(1);
lockv.push_back(1);
fb.position.x=pose->pose.position.x;
fb.position.y=pose->pose.position.y;
fb.position.z=pose->pose.position.z;
fb.lock=lockv;
pub_force.publish(fb);
touch_state=LOCK;
ROS_INFO("手柄已锁住");
}
//释放Touch手柄 解锁、不输出力
void touch_release(void)
{
vector<uint8_t> lockv;
geomagic_control::DeviceFeedback fb;
lockv.push_back(0);
lockv.push_back(0);
lockv.push_back(0);
fb.lock=lockv;
pub_force.publish(fb);
touch_state=RELEASE;
ROS_INFO("手柄已释放");
}
至此,头文件与源文件编写完成。
编写CMakeList文件,与前述位姿与按键信息获取时的相同,已修改的直接编译即可。
cmake_minimum_required(VERSION 3.0.2)
project(geomagic_myhaptics)
find_package(catkin REQUIRED COMPONENTS
geomagic_control
geometry_msgs
roscpp
rospy
std_msgs
)
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES geomagic_myhaptics
# CATKIN_DEPENDS geomagic_control geometry_msgs roscpp rospy std_msgs
# DEPENDS system_lib
)
include_directories(
# 这里取消注释
include
${catkin_INCLUDE_DIRS}
)
add_executable(pubforce src/pubforce.cpp)
add_dependencies(pubforce ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(pubforce
${catkin_LIBRARIES}
)
编译,成功通过。
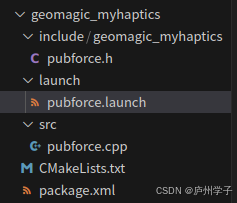
编写launch文件
在功能包下新建launch文件夹,以及launch文件。
填入以下内容:
<launch>
<include file="$(find geomagic_control)/launch/geomagic_headless.launch" />
<node pkg="geomagic_myhaptics" type="pubforce" name="pubforce" output="screen" />
</launch>再次编译。
连接上Touch手柄,运行launch文件。
roslaunch geomagic_myhaptics pubforce.launch 至此,成功实现基础的力反馈功能。
Touch手柄力反馈
本文用到的三个功能包已上传,可自行下载:
https://download.youkuaiyun.com/download/qq_38236680/90261813
祝科研有进,前程似锦。

















 2304
2304

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









