







 本文介绍了如何使用open3d库将PCD点云数据从npy格式转换为txt,以便于可视化,并处理RGB值范围,以适应深度学习模型的输入需求。关键步骤包括数据加载、维度调整和颜色归一化。
本文介绍了如何使用open3d库将PCD点云数据从npy格式转换为txt,以便于可视化,并处理RGB值范围,以适应深度学习模型的输入需求。关键步骤包括数据加载、维度调整和颜色归一化。
-
pcd点云的存储形式一共有两种,分别是binary和ascll码的形式,其详解见https://blog.youkuaiyun.com/qq_37534947/article/details/107187907
-
前期准备:
open3d的安装:
pip install open3d
pip install open3d-python==0.7.0.0 (这个必须有)
1.可视化代码
#coding=utf-8
import open3d as o3d
import numpy as np
np.set_printoptions(suppress=True) # 取消默认科学计数法,open3d无法读取科学计数法表示
data = np.load('./Area_1_conferenceRoom_1.npy')
b = np.array([1 , 1, 1,255, 255, 255]) # 每一列要除的数
np.savetxt('./scene.txt', data[:,:6]/b)
# 读取点云并可视化
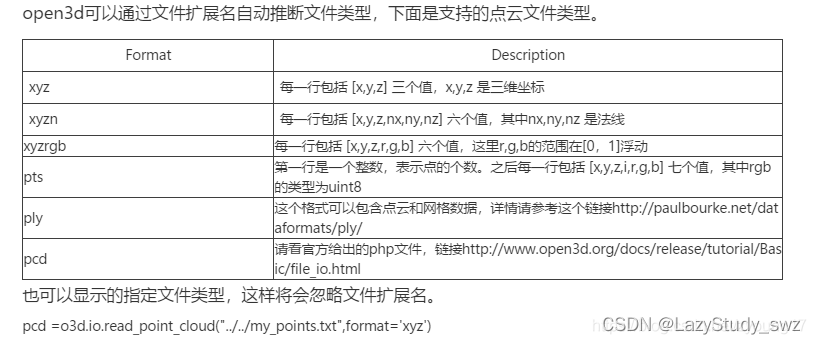
pcd =o3d.io.read_point_cloud('./scene.txt', format='xyzrgb') # 原npy文件中的数据正好是按x y z r g b进行排列
print(pcd)
o3d.visualization.draw_geometries([pcd], width=1200, height=600)
2.代码分析
-
加载数据
data = np.load('./Area_1_conferenceRoom_1.npy')这时候的数据大小要分清,一般是n * 6,这里的6维分别指的XYZRGB;
但是我的S3dis数据集是n * 7,最后一位是标签,所以需要把最后一维去掉。 -
维度减少
np.savetxt('./scene.txt', data[:,:6]/b) -
rgb范围减少
原数据中rgb值的范围为0-255,而open3d需要调整为0-1。所以需要数组中指定列除以一个255,即将最后3列除以255,最后保存为txt文件b = np.array([1 , 1, 1,255, 255, 255]) # 每一列要除的数 np.savetxt('./scene.txt', data[:,:6]/b)如果不进行减少的话,可能会报错:
[Open3D WARNING] [ViewControl] SetViewPoint() failed because window height and width are not set.
3.可视化txt文件
因为npy文件,无法直接可视化,所以需要转换成txt文件,最后再利用open3d可视化。
# 读取点云并可视化
pcd =o3d.io.read_point_cloud('point_cloud/scene.txt', format='xyzrgb') # 原npy文件中的数据正好是按x y z r g b进行排列
print(pcd)
o3d.visualization.draw_geometries([pcd], width=1200, height=600)

参考链接:https://blog.youkuaiyun.com/zyoung17/article/details/106963253/


















 5万+
5万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











