






转载自S32K3学习笔记
小猫爪:S32K3学习笔记03-S32K3之eMIOS
- 1 前言
- 2 eMIOS资源介绍
- 3 CNT和Counter Bus
- 4 UC的工作模式
-
- 4.1 General-Purpose Input and Output (GPIO) mode
- 4.2 Single Action Input Capture (SAIC) mode
- 4.3 Single Action Output Capture (SAOC) mode
- 4.4 Input Pulse Width Measurement (IPWM) mode
- 4.5 Input Period Measurement (IPM) Mode
- 4.6 Double Action Output Compare (DAOC) mode
- 4.7 Pulse Edge Counting (PEC) mode
- 4.8 Modulus Counter (MC) mode
- 4.9 Modulus Counter Buffered (MCB) mode
- 4.10 Output Pulse Width and Frequency Modulation Buffered (OPWFMB) mode
- 4.11 Center Aligned Output PWM with Dead Time Insertion Buffered (OPWMCB) mode
- 4.12 Output PWM Buffered (OPWMB) mode
- 4.13 Output PWM with Trigger (OPWMT) mode
- 5 MCAL配置
- END
1 前言
这几天简单的学习了一下K3的eMIOS,这应该也算是K3相比较K1的一个大升级吧,因为eMIOS比FlexTimer强,常常得用它来进行信号测量啊,PWM波生成啊之类的。下面就简单的介绍一下这个模块吧。
2 eMIOS资源介绍
下面两个表对eMIOS的资源情况做了简单详尽的介绍,大家仔细观看。

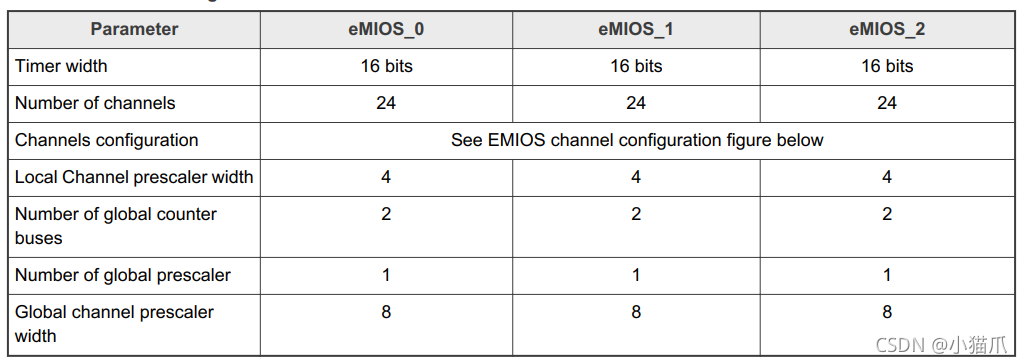
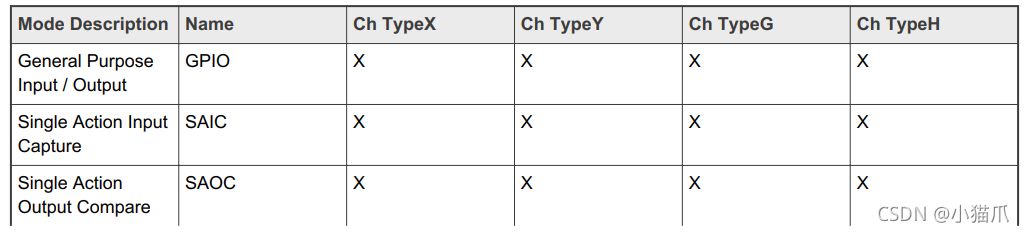
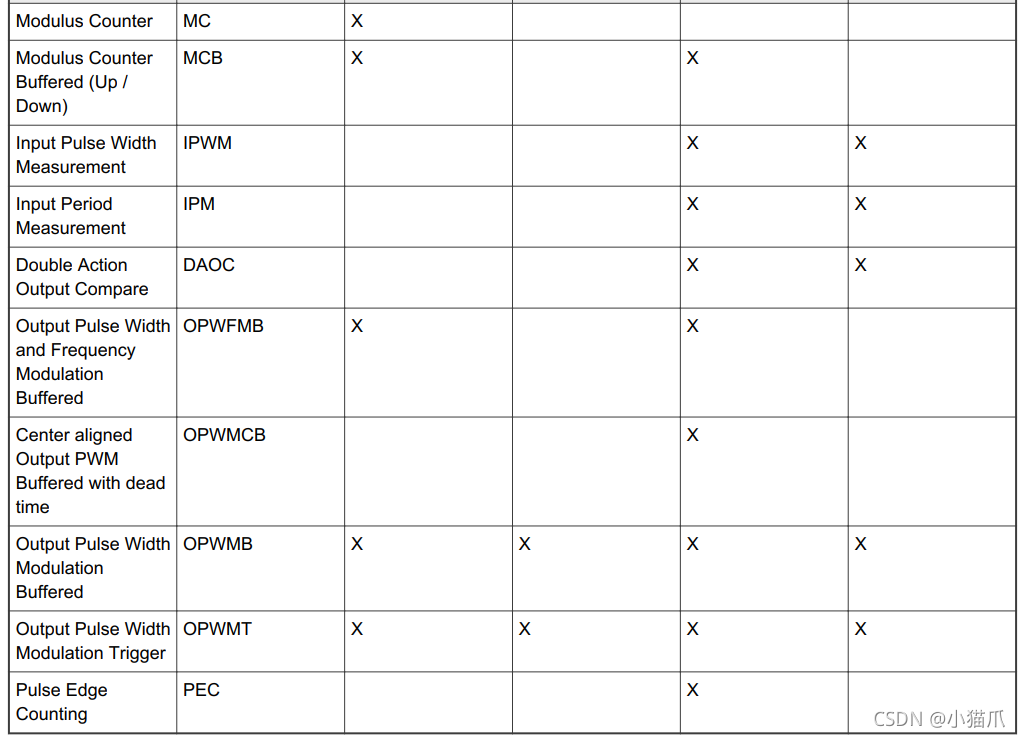
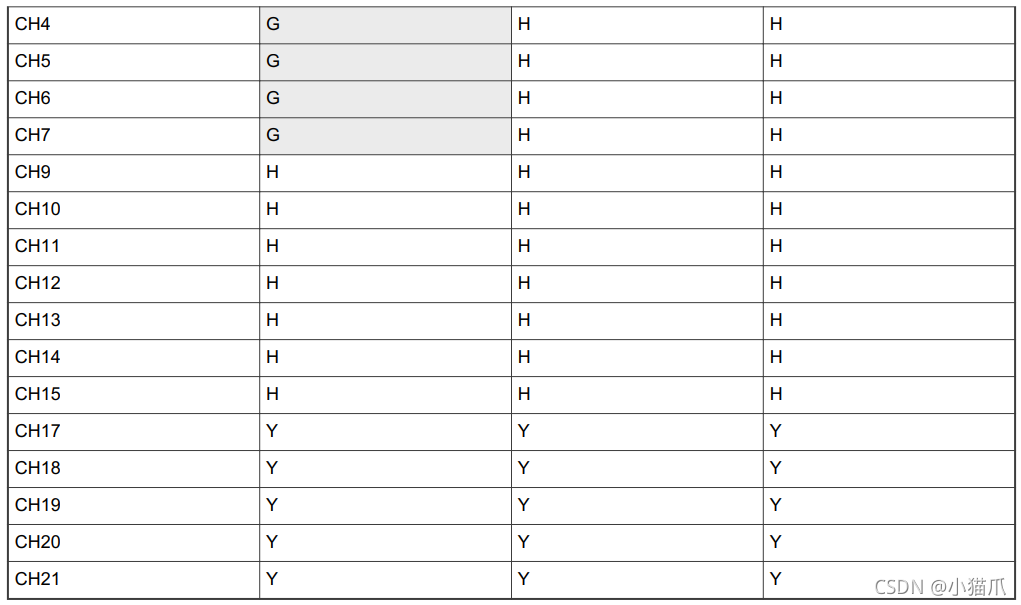
可以看到每个eMIOS模块都有24个通道(UC),这些通道都是相互独立的且又是互相配合,但是这些通道在结构上并不是一模一样,而是分成了4种通道类型,分别是TypeX,TypeY,TypeG,TypeH。这4种通道类型的区别就在于它们所支持的工作模式不同,下表显示了每种通道所支持的工作模式。
下表显示三个eMIOS模块的24个通道分别是那种类型:
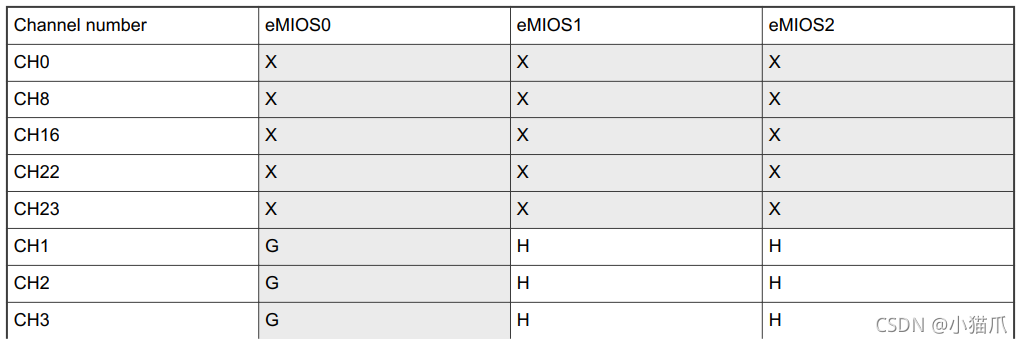
为啥要设计不同结构的通道呢,这就是由eMIOS的工作原理来决定了,虽然说每个通道相互独立,但是eMIOS强大的功能需要由数个通道相互组合才能完全发挥。
3 CNT和Counter Bus
eMIOS的通道,通道又叫Unified channels(UC)。eMIOS各个UC之间是怎么相互合作的呢,其中一个最重要的点就是Counter Bus。什么是Counter Bus呢?
举个例子,在传统PWM生成模块中,里面都会有一个内部计数器,如果让其生成想要的PWM波则需要设置这个内部计数器的计数方式以及周期等,而eMIOS的Counter Bus则就是代替了这个内部计数器。而这个Counter Bus信号则就是另外一个UC的内部计数器CNT(每个UC内部都有一个内部计数器CNT)。
所有,如果我们需要使用eMIOS生成PWM信号的话,首先则需要先配置通道A内部计数器CNT的计数方式和周期,让通道A的CNT变成其他通道的Counter Bus;随后再配置通道B以Counter Bus代替自己的CNT作为计数器,两者结合就可以生成PWM信号了,也就是说生成一个PWM信号需要两个通道相互配合才能生成。
那么就有人问了,只使用一个通道不行吗,通道里面不是有一个CNT吗?答案是:当然可以。使用一个通道也是可以产生PWM的,这取决于通道的工作模式。因为每个通道是相互独立的,所以使用单个通道生成PWM做不到和别的通道生成的PWM同步,但是Counter Bus则完美的解决了这一点,因为多个通道可以共用一个Counter Bus。
当然也不是所有的通道都可以生成Counter Bus,还记得前面提供eMIOS的24个UC的结构是不同的,只有TypeX型UC可以生成Counter Bus。
经过上面的讲解,下面这副图就非常清晰了。
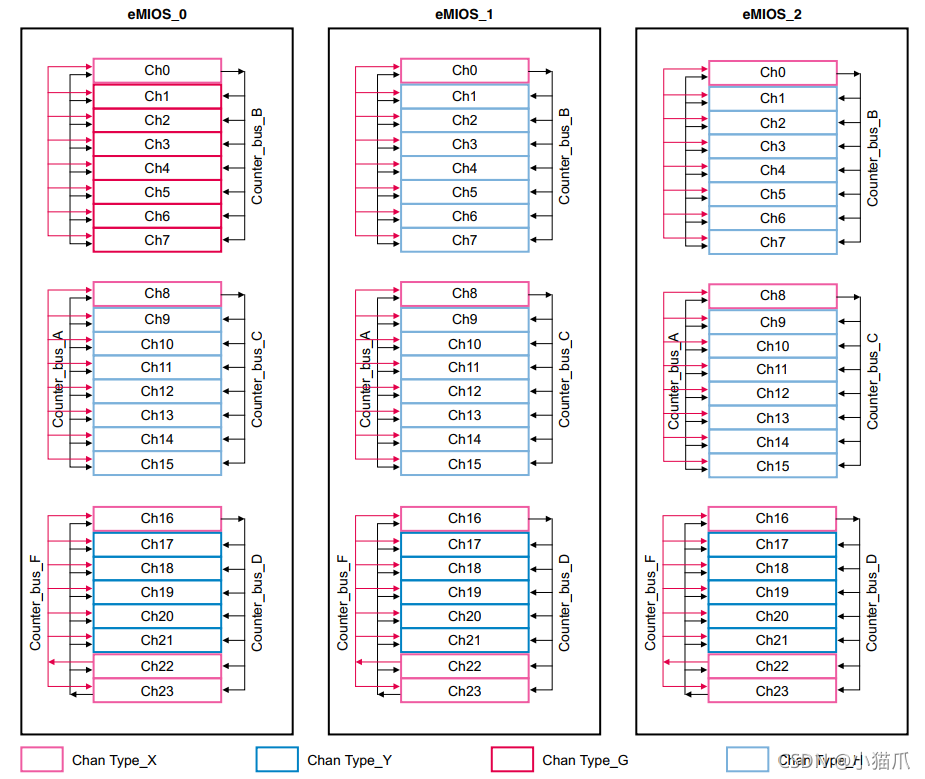
TypeX型通道CH0,CH8,CH16分别生成局部Bus Counter_bus_B,Counter_bus_C,Counter_bus_D,局部Bus只能供给部分通道;TypeX型通道CH22,CH23生成全局Bus Counter_bus_A,Counter_bus_F,全局Bus可以为其他所有通道提供Bus。
4 UC的工作模式
从上面的介绍中得知eMIOS的通道,支持很多种模式,接下来就对这些模式进行简单的介绍。
4.1 General-Purpose Input and Output (GPIO) mode
这种模式属于UC的默认模式,或者叫初始状态吧,没啥暖用,唯一的作用就是用来作为过渡模式,也就说如果把一个UC由工作模式A变成工作模式B,那么就必须先UC变成GPIO模式,然后再将其配置成工作模式B。
4.2 Single Action Input Capture (SAIC) mode
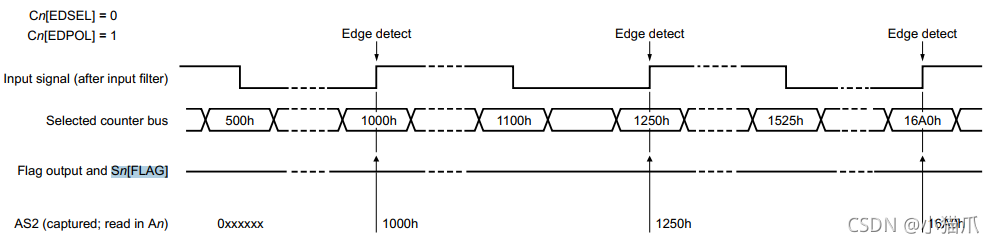
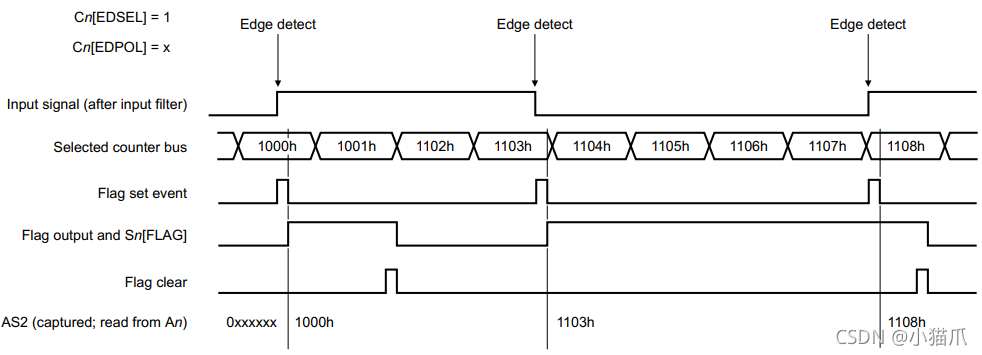
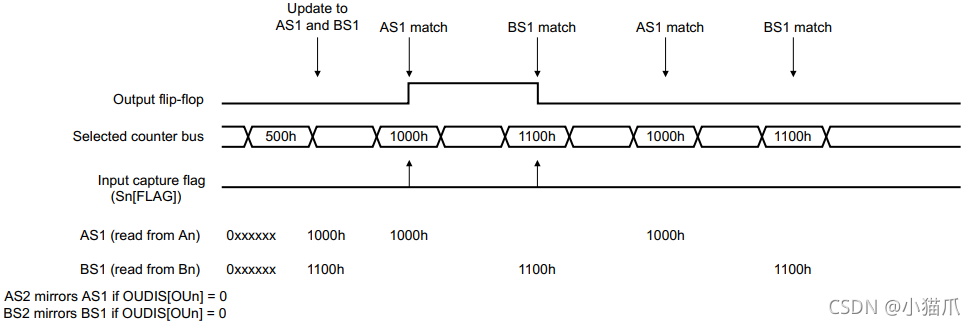
这个就是最简单的传统意义上的输入捕捉功能,检测到一个上升沿或者下降沿,UC就生成一个Flag信号Sn[FLAG],同时捕捉当前Counter Bus的值到AS2。
-
单边沿捕捉如下:
-
双边沿捕捉如下:
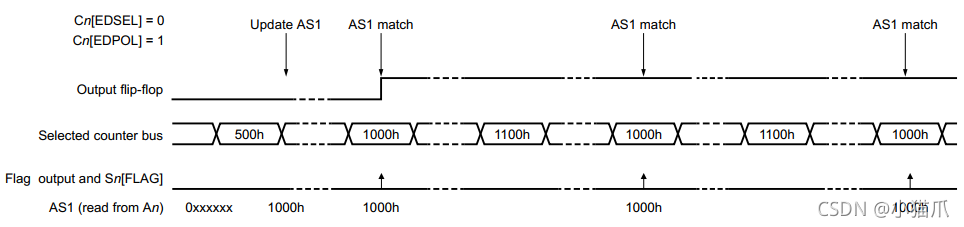
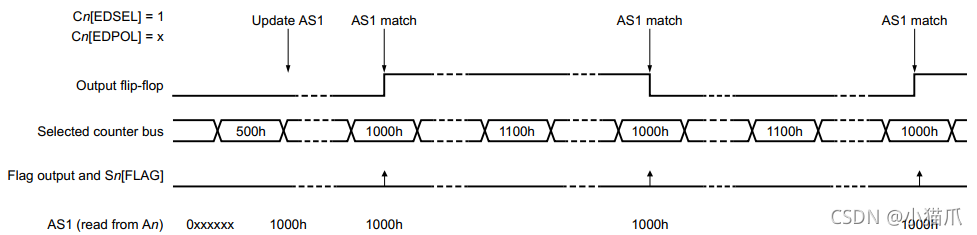
4.3 Single Action Output Capture (SAOC) mode
这个也就是最简单的匹配匹配输出功能,给AS2写入一个值,当Counter Bus的值与AS2相等时,这个时候就会产生一个Flag信号,同时控制输出跳变或者翻转。
-
信号跳变
-
信号翻转
4.4 Input Pulse Width Measurement (IPWM) mode
这个模式就是用来测量两个连续不同沿之间的宽度,即测量一个电平宽度。当检测到第一个沿(上升沿或者下降沿),捕捉Counter Bus的值,当检测到第二个沿(与第一个沿相反),再捕捉Counter Bus的值并产生一个Flag信号。
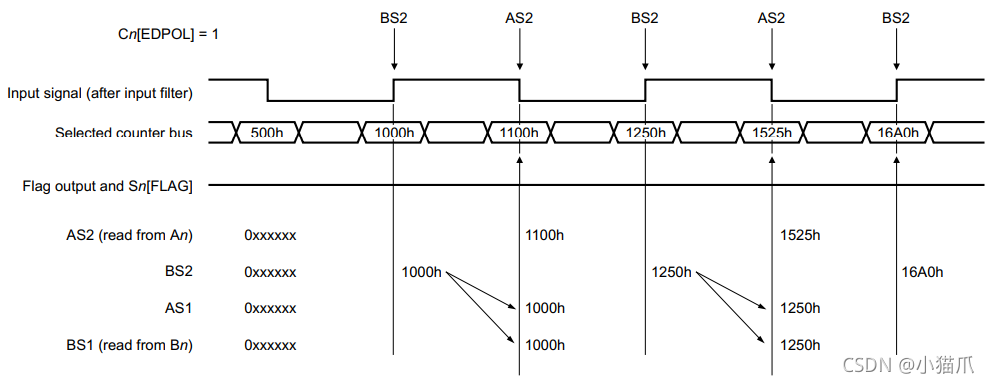
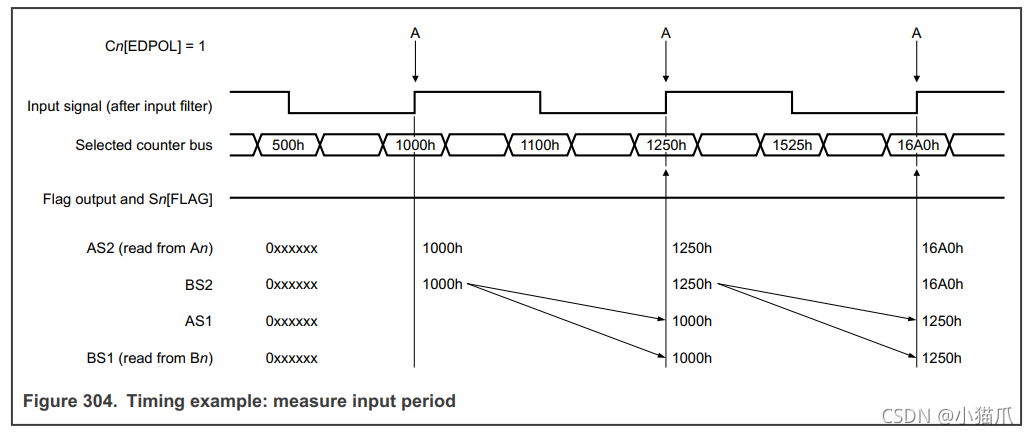
4.5 Input Period Measurement (IPM) Mode
这个模式用来测量两个连续相同沿的宽度,通常用来测量信号周期,即检测到第一个沿(上升沿或者下降沿),捕捉Counter Bus的值,当检测到第二个沿(与第一个沿相通),再捕捉Counter Bus的值并产生一个Flag信号。
4.6 Double Action Output Compare (DAOC) mode
这个模式通常用于生产一段固定长度的电平。这个模式相比较SAOC,就是它可以有两个比较输出,最常见的应用就是当第一个匹配事件发生时,输出信号翻转,第二个匹配事件发生时,输出信号再次翻转。第一个匹配成功后可生产Flag信号也可以不生成Flag信号(可配置),而第二个匹配成功后则肯定会产生Flag信号。
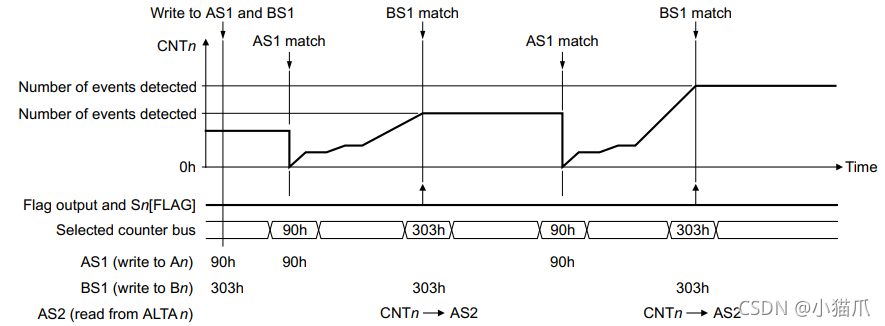
4.7 Pulse Edge Counting (PEC) mode
这个模式通常用来测量信号的脉冲数或者边沿数。外部信号输入后,检测到有效信号后计数器累加,并且在当计数器CNT值发生匹配事件A后,复位计数器CNT并启动计数,发生匹配事件B后,停止计数并且输出Flag信号。
4.8 Modulus Counter (MC) mode
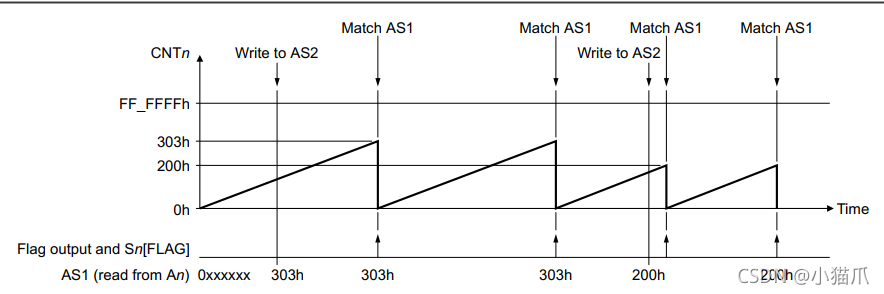
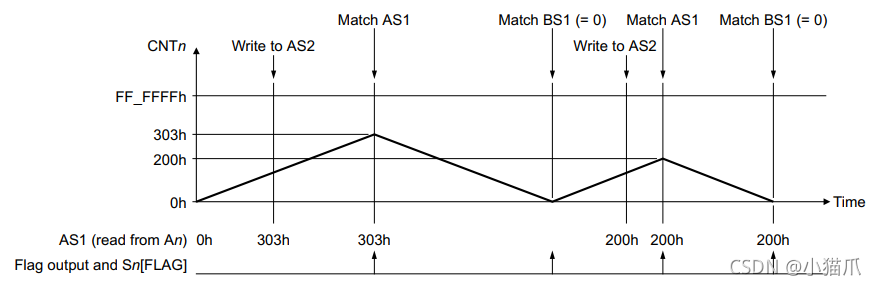
这个模式就是典型的把一个通道变成一个传统定时器的功能了,或者可以为其他通道生成一个Counter base信号。可以工作在UP计数模式和Up Count-Down计数模式。中途可以随意修改匹配值AS1。
- 在UP计数模式下,可产生一个溢出Flag信号,如下图所示:
- 在Up Count-Down计数模式下,可产生两个匹配事件并产生Flag信号,分别是高低峰处AS1和BS1,如下图所示:
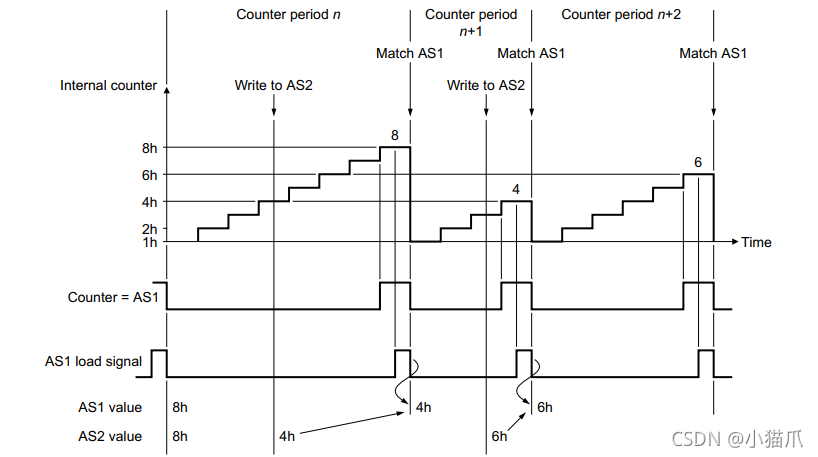
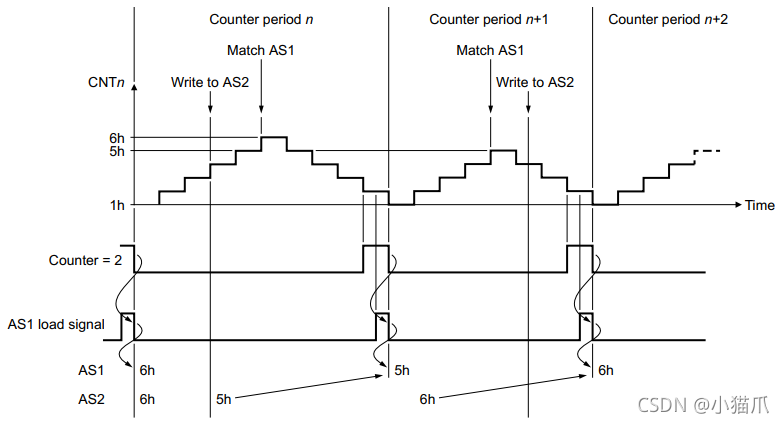
4.9 Modulus Counter Buffered (MCB) mode
这个模式就是单纯的为了生成一个Counter Bus信号。它也有两种模式,跟MC模式一样,直接贴图:
- Up Count
- Up Count-Down Count
个人猜测:至于它与MC模式有什么区别,我也不知道,反反复复研究了好久都不知道这个buffered代表了什么,如果后面我悟了,会回来更新的,我个人觉得就是使能了寄存器双缓存机制,让改变寄存器值得速度变得更加的快。)
4.10 Output Pulse Width and Frequency Modulation Buffered (OPWFMB) mode
这个模式通常用来生成单个PWM信号,因为这种模式没有采用Counter Bus作为自己的计数器,至于原理很简单,直接贴图:
CNT与AS1匹配后输出翻转,CNT与BS1匹配后输出再翻转,一个周期结束。也就是说AS1决定PWM的占空比,BS1则决定PWM的周期。
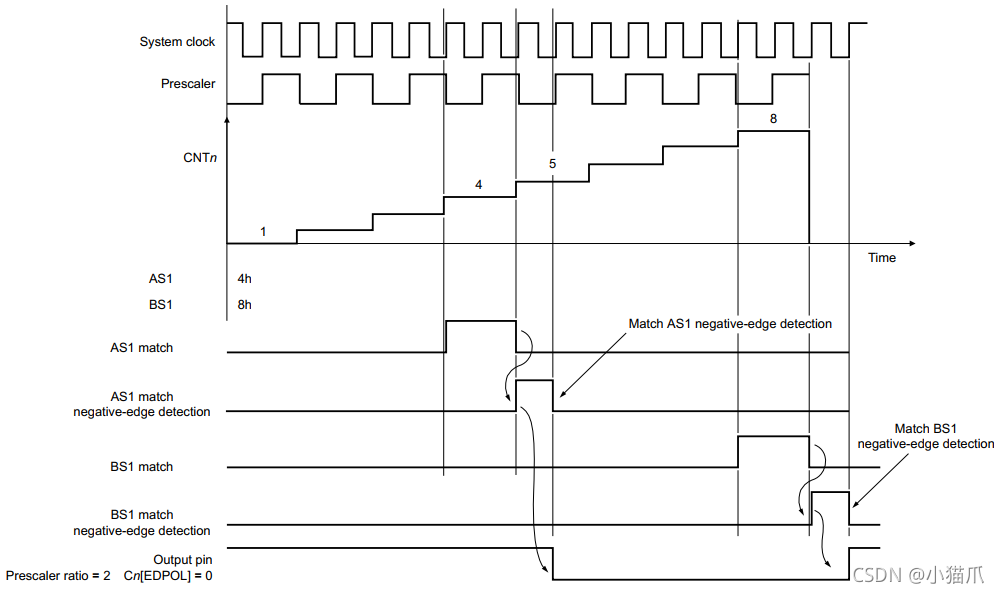
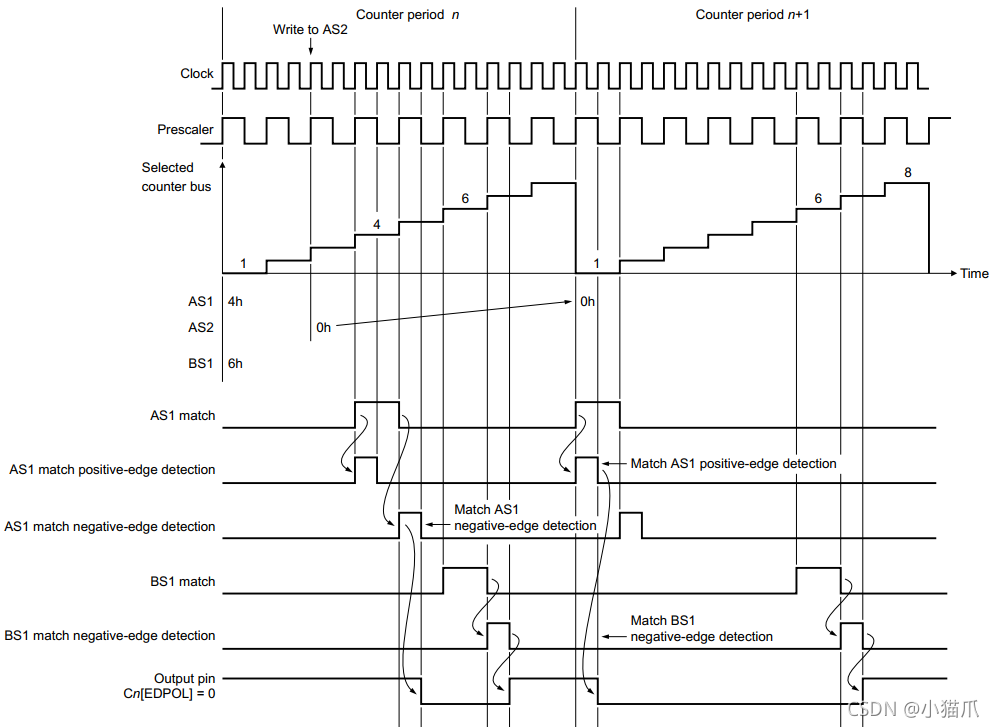
4.11 Center Aligned Output PWM with Dead Time Insertion Buffered (OPWMCB) mode
这个模式通常用来生成同步PWM信号,因为这种模式使用了Counter Bus作为计数器,至于原理很简单,直接贴图:
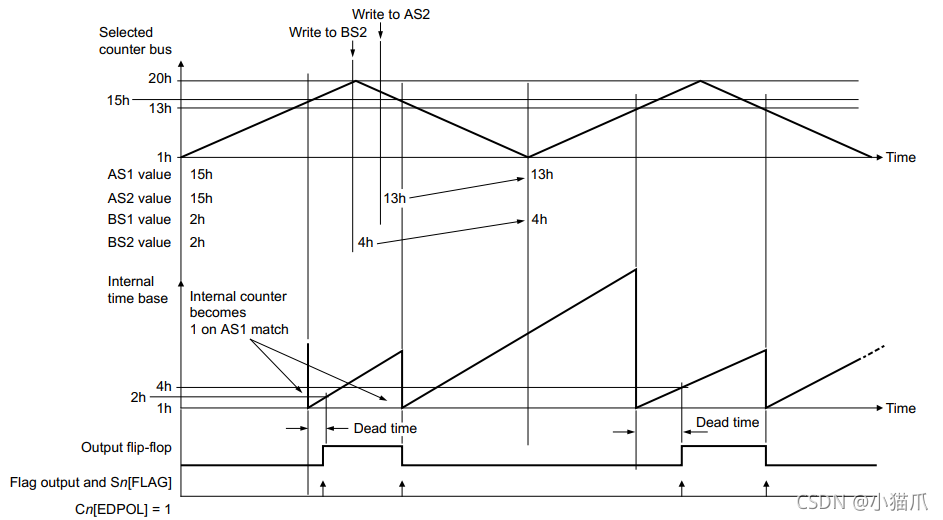
可以看到在这个模式下,还可以插入死区时间。AS1决定占空比,BS1决定死去时间,至于周期则由Counter Bus来决定。
4.12 Output PWM Buffered (OPWMB) mode
这个模式也是用来生成同步PWM信号,如下图所示:
这个模式与OPWFMB的区别就是它的周期是由选择的Counter Bus来决定的,而占空比则是由AS1和BS1共同决定。
4.13 Output PWM with Trigger (OPWMT) mode
这个模式不仅能生成PWM,还可以用来生成触发信号,通常用其来配合其他通道生成同步触发信号来触发ADC。而这个模式必须选择外部计数器,而且还必须是MC up和MCB up驱动生成的Counter Bus。

5 MCAL配置
下面就结合MCAL配置来把eMIOS模块用起来。首先设置完PORT的复用之后,接下来就是:
5.1 MCU
首先得在MCU模块中使能eMIOS模块得时钟,以及设置参考时钟。

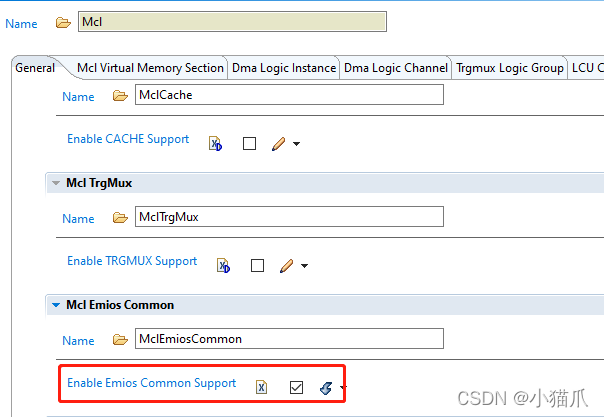
5.2 MCL
然后得需要在MCL模块中激活eMIOS的支持,以及设置相应的counter bus。
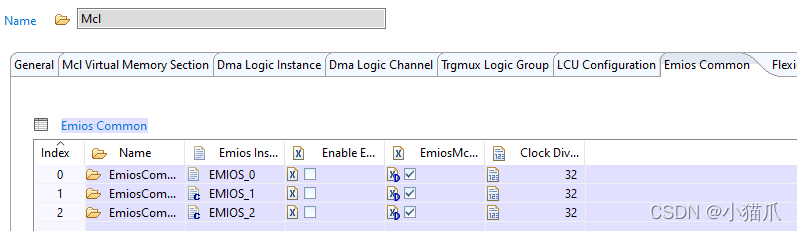
添加counter bus,如下图:

这里需要注意以下,就是如果这个counter bus是给ICU使用的,即给输入捕获使用的,则必须设置成65535。
5.3 PWM
如果是要产生PWM,则需要在PWM里面增加eMIOS的通道:
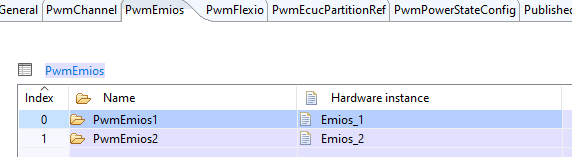

设置完相应的工作模式,参考Counter bus之后,添加PWM通道:
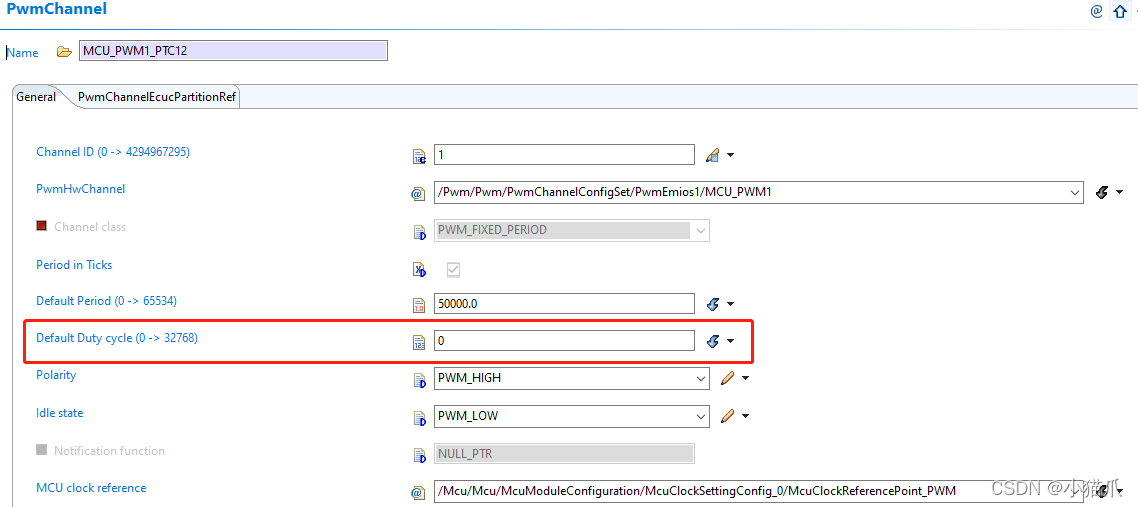
在这里需要注意的是,周期必须设置成与eMIOS通道相等,另外对于占空比,则是将占空比100等比变成了0x8000,举个例子,如果你要设置占空比为50%,那么这里的占空比则是要设置成0x4000。
到这里为止,PWM就可以产生了。
5.4 ICU
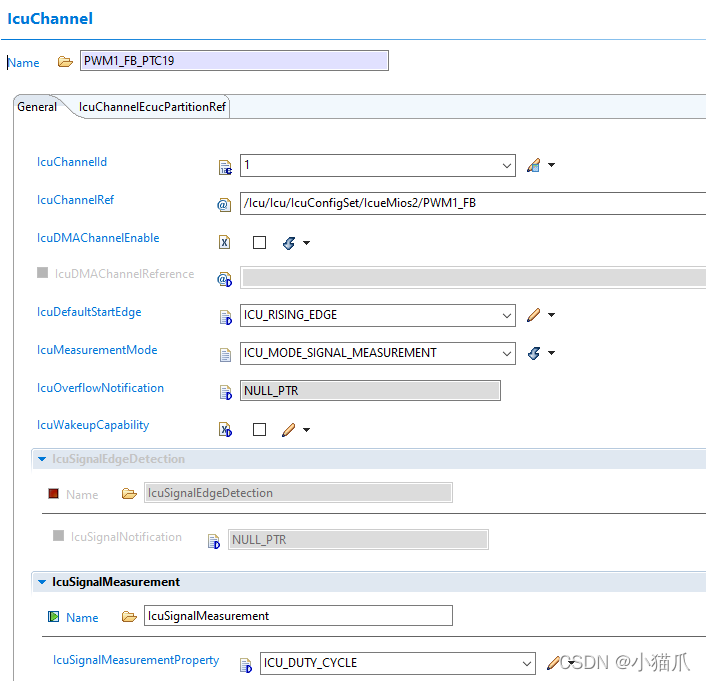
如果要使用eMIOS的输入捕获功能,则需要配置ICU模块,首先同样的在ICU中添加参考eMIOS通道:
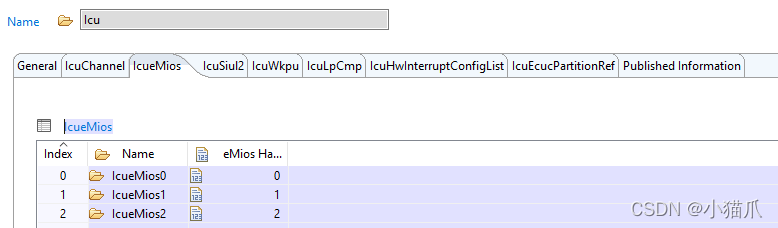
设置好通道的工作模式,参考counter bus:
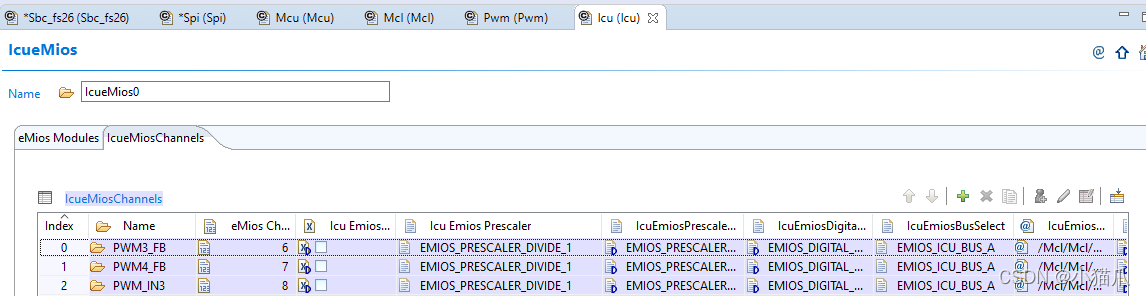
在这里需要注意的是,如果需要测量周期占空比,IPWM模式支持测量频率更大的信号,SAIC模式则小一点。之后就是添加ICU通道:
到这里还没有完,还需要去在platfrom模块中使能eMIOS的中断以及注册相应的中断服务函数,因为ICU是需要中断来做的:

至于通道数核服务函数名之间的对应关系如下:
| 中断服务函数 | 通道数 |
|---|---|
| EMIOSx_0_IRQ | 20~23 |
| EMIOSx_1_IRQ | 16~19 |
| EMIOSx_2_IRQ | 12~15 |
| EMIOSx_3_IRQ | 8~11 |
| EMIOSx_4_IRQ | 4~7 |
| EMIOSx_5_IRQ | 0~3 |
当然也可以通过轮询的方式来实现,这种方式就不介绍了,此外还可以通过DMA的方式来实现,但是这种方法我觉得挺鸡肋的,这个数据量太小了。这里也不多做介绍了。
5.5 周期频率的计算
下面来看一看周期频率的计算,举个例子来看一下计算过程。
- 首先第一步去看这个通道的Counter Bus来源是啥,比如这里选择的BUS_F,如下:

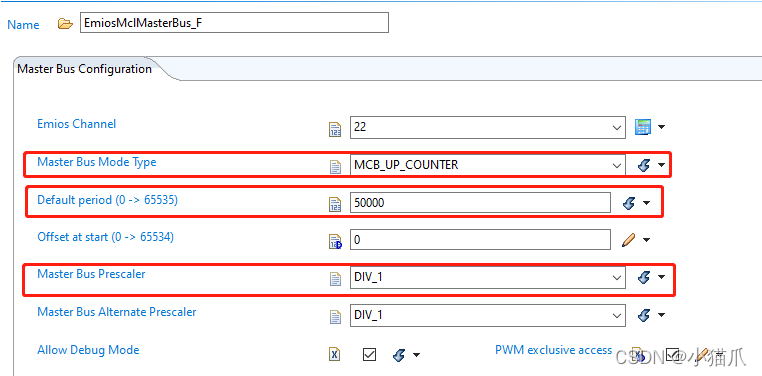
- 找到这个被引用的Counter Bus的配置,并且记住如下所示的三个参数:分别是MasterBusPrescaler, DefaultPeriod, MasterBusModeType。
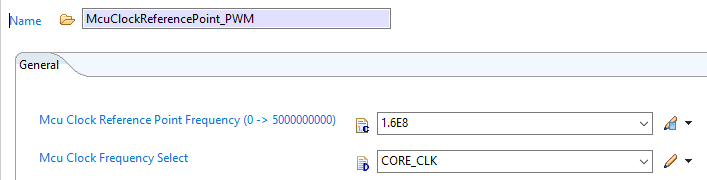
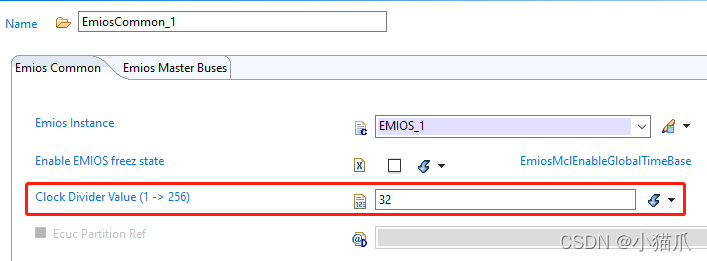
- 找到eMIOS模块的总分频系数ClockDividerValue,如下:
- 找到eMIOS的参考时钟,并记录其参考时钟源,其实就是CoreClock,为160MHz,如下:
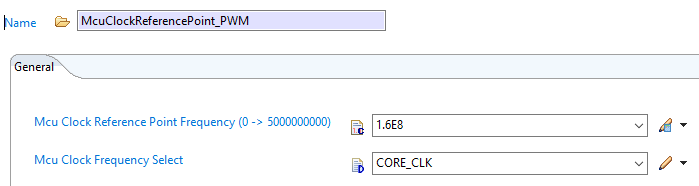
得到这些参数就可以计算累加频率了,如下:累加频率 = CoreClock / ClockDividerValue / MasterBusPrescaler / DefaultPeriod。
所在在这里所设置的累加频率为:
160M / 32 / 1 / 50000 = 1000。
最后再看看MasterBusModeType,也就是看看它的工作模式,如果是Up模式,则最后的频率为1000,如果是Up-Down模式,则最后的频率则为2000。

















 3447
3447

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









