




 本文是ROS学习笔记的第一部分,主要介绍Catkin工作空间及其在Ubuntu 16.04和ROS kinetic环境下的使用。Catkin是ROS的定制编译系统,用于组织和管理ROS工程。通过catkin_make命令编译,会在工作空间中生成build和devel文件夹,src目录下存放各个package。编译后需source刷新环境。
本文是ROS学习笔记的第一部分,主要介绍Catkin工作空间及其在Ubuntu 16.04和ROS kinetic环境下的使用。Catkin是ROS的定制编译系统,用于组织和管理ROS工程。通过catkin_make命令编译,会在工作空间中生成build和devel文件夹,src目录下存放各个package。编译后需source刷新环境。
目前在上手ROS,看到有推荐中科院软件所的课程,决定边学习边梳理,加深理解!与大家分享交流~
我的环境是ubuntu16.04, ROS kinetic
Catkin工作空间与编译系统
ROS工程结构
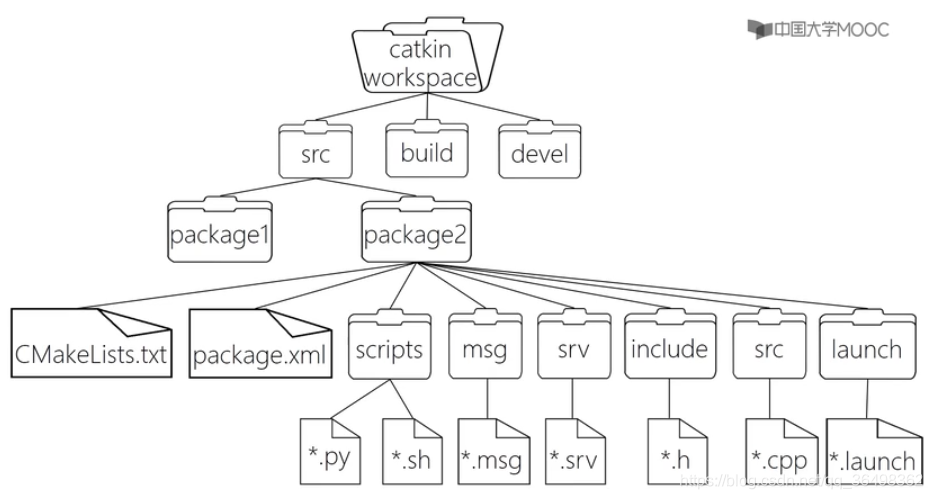
Catkin工作空间
管理和组织ROS工程、代码的地方
catkin是ROS定制的编译构建系统,是对CMake的扩展
catkin_make
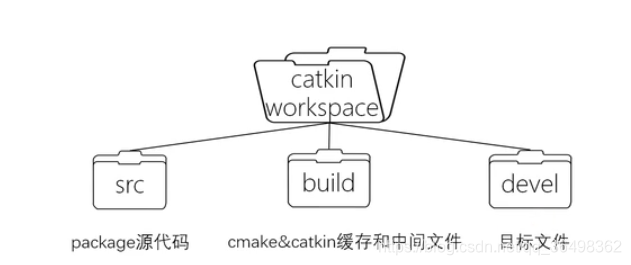
分别执行以下三条命令,就会在home文件夹下建立工作空间,“xiaow_ws”这个文件夹名称可以自己取,记得要有src文件夹,回到工作空间目录xiaow_ws,执行catkin_make编译,会自动生成build和devel文件夹。
mkdir -p ~/xiaow_ws/src # 建立工作空间
cd ~/xiaow_ws/ # 回到工作空间
catkin_make # 编译
编译之后一定要记得source刷新环境!(擅于tab补全功能)
source ~/xiao 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1577
1577

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









